I am trying to make use of MAVLINK_MSG_LANDING_TARGET to have my drone do Precision Landing, and i have been making some references with these few links here:
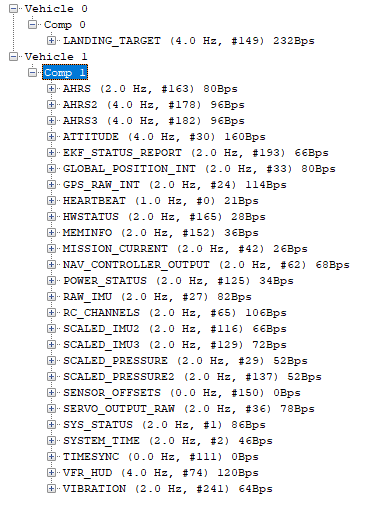
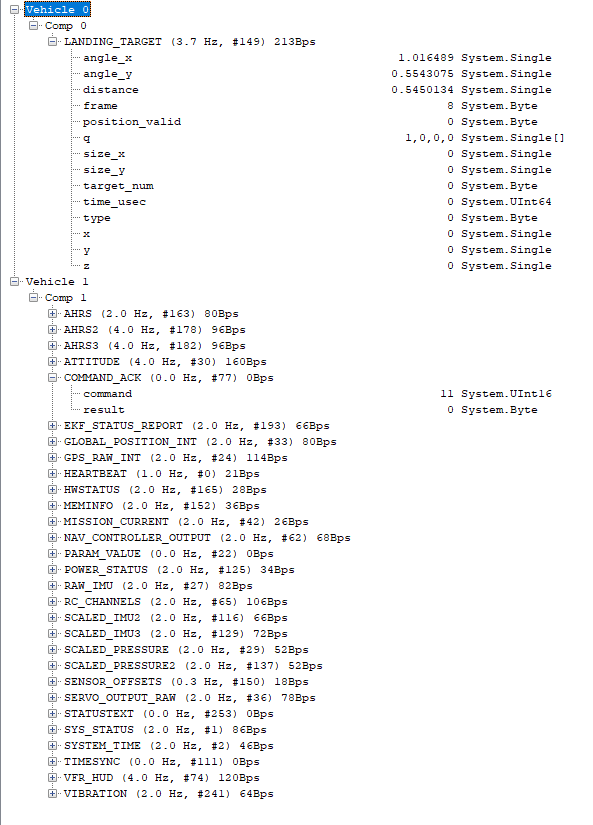
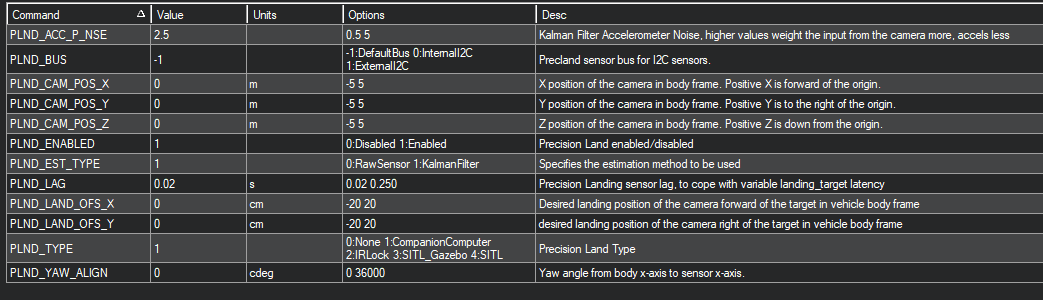
I have not actually flown my drone to see if it works, but i was wondering whether there are parameters/mavlink messages that i can see on mission planner to kind of confirm that the precision landing will actually happen beforehand.
Do the screenshots of these parameters tell me anything?
I have seen your lab picture but i am unfamiliar with using SITL through ubuntu and QGroundControl. I have only worked with SITL through mission planner on a windows laptop currently.
Would you be able to advice me on how this can be done using mission planner? For example, may i know where i can get the LANDING_TARGET graph on mission planner of which you have obtained using QGroundControl?
Is it possible to make use of this to output mavlink to a udp port so that QGroundControl can connect to MP?
Also, does anyone know if i will get a mavlink message when landing target is acquired/lost/initialised when using arducopter versions that is not the dev version? I see this when i run SITL which uses arducopter v4.2.0-dev
I have managed to test out precision loiter and it seems to be correcting the position of my drone towards my target, however the drone moves quite violently and abruptly. I have tried adjusting my PID values but it doesn’t seem to help.
May i know what other settings i can or should change to remove this violent behavior?
I have tried reducing the WPNAV_ACCEL and WPNAV_SPEED and the drone does move less violently.
Another thing that i’ve noticed is that my drone does not react as quickly when it sees the target, are there settings that i can change to increase the sensitivity? Also, when i feed the angle_x and angle_y in my LANDING_TARGET message, does the flight controller take into account the attitude of the drone?