Hello,
Has anyone tried working with the mavlink 2 part of the LANDING_TARGET message?
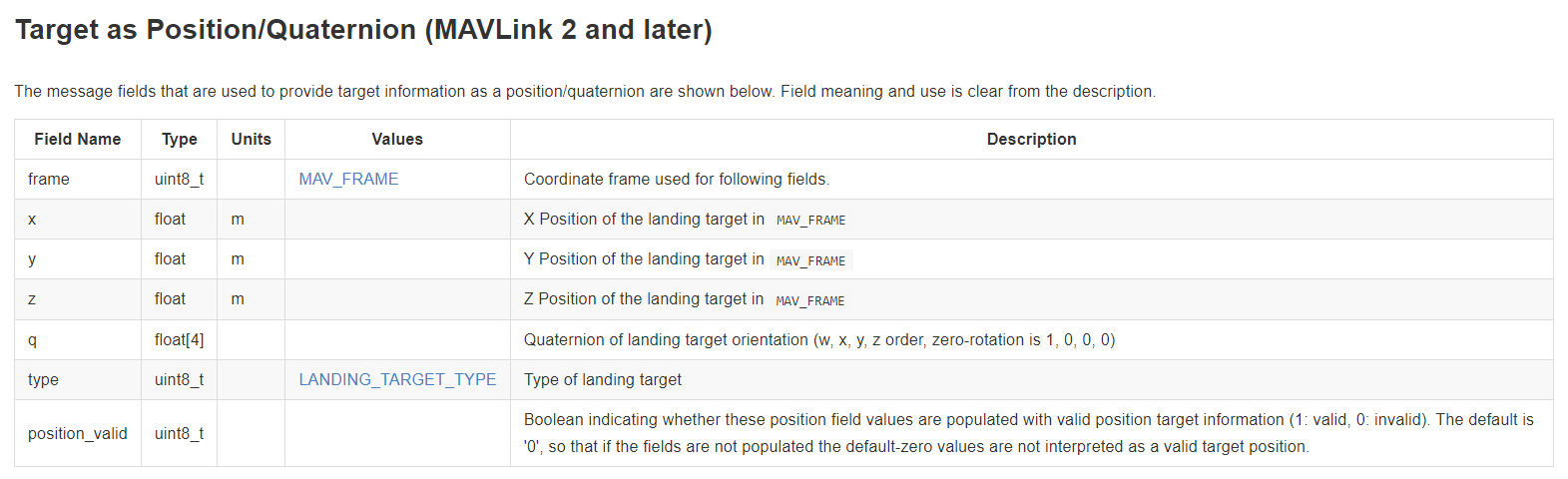
I was wondering if the accuracy of the precision landing will be further improved with the X, Y and Z position inputs.
Hello,
Has anyone tried working with the mavlink 2 part of the LANDING_TARGET message?
I was wondering if the accuracy of the precision landing will be further improved with the X, Y and Z position inputs.
@limzw we ignore those values at the Ardupilot backend… so it will make no difference if you send those
Ok thanks for the clarification!
Hi,
I am currently trying to achieve precision landing by sending LANDING_TARGET messages to my flight controller and i do see the drone correcting itself correctly when precision loiter is activated.
I have been adjusting the PSC_VELXY_P, PSC_VELXY_I and PSC_VELXY_D values to try to smoothen out the correction and it seems to be working, but not as precisely as what i would like it to be. The drone does not seem to be able to come to a point where it will stop/minimize roll and pitch movements even though it is almost exactly above the landing target.
Does anyone know what i can do to continue to fine-tune the corrective movement of my drone? Do i still try and tweak the PSC_VELXY values, or are there other parameters i can adjust?
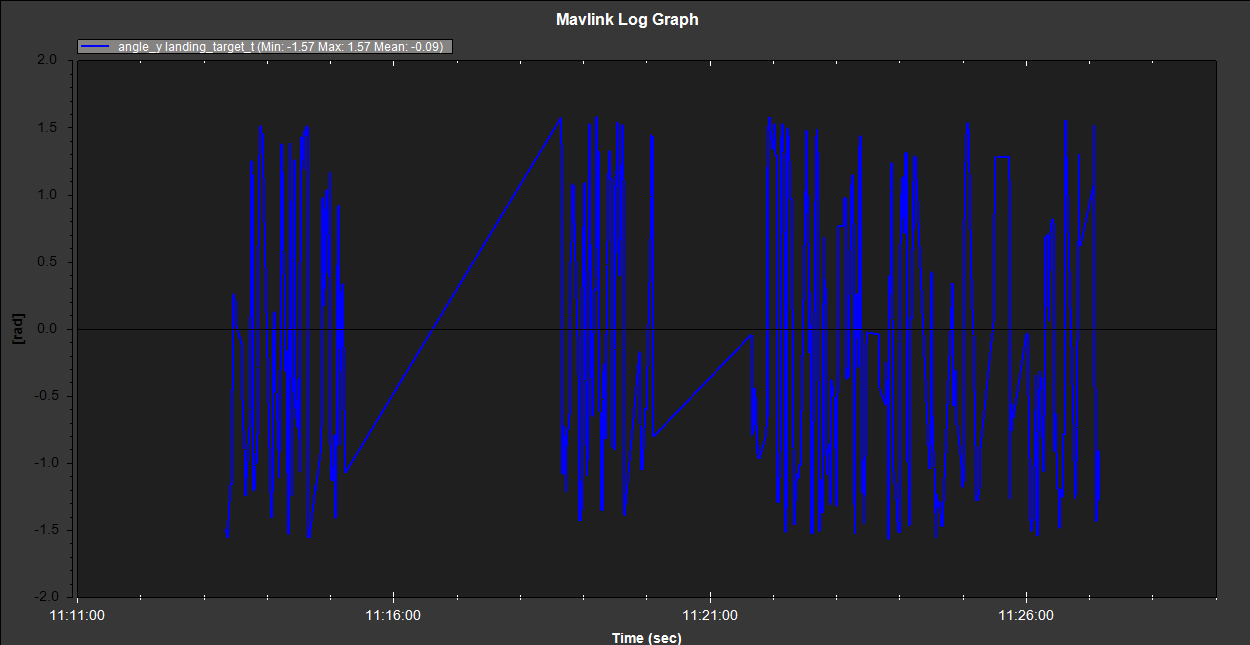
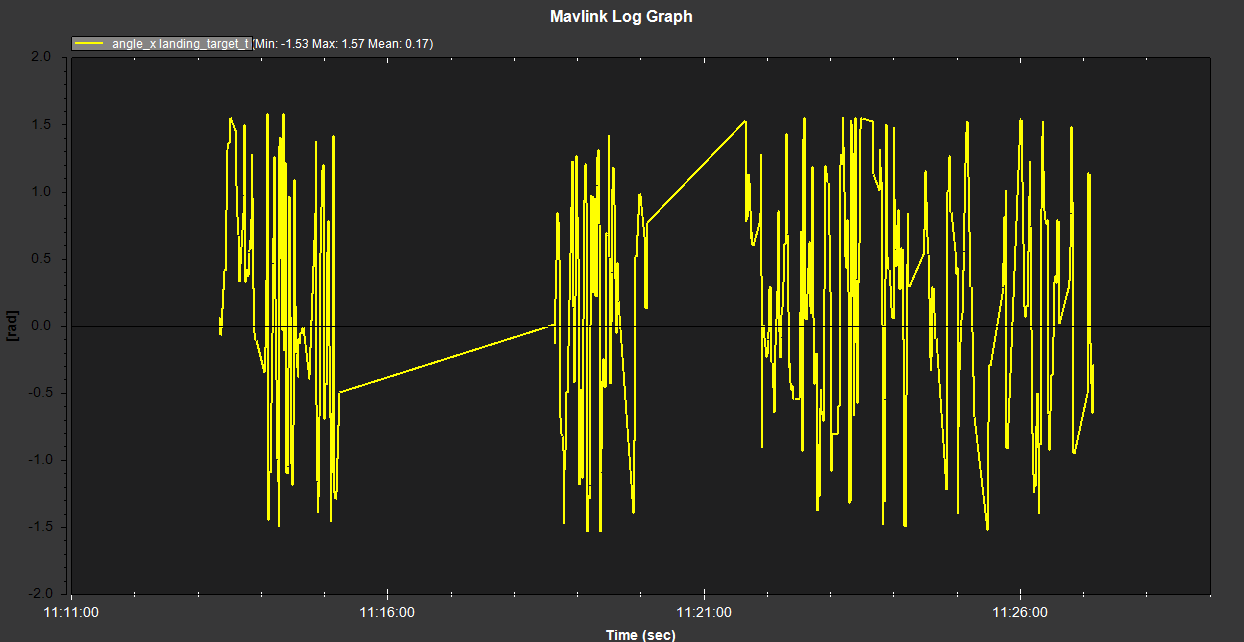
I am not exactly sure what data i should review when i look at the flight logs of my drone but below are images of what i am getting for angle_y_landing_target_t and angle_x_landing_target_t:
If these logs are what i should look at, may i know how i can move on from here to improve the performance of the precision landing?
Also, how does the flight controller make use of the distance sent in the LANDING_TARGET message? Is there a relationship between distance and correction of drone? i.e. if distance is below a certain threshold, the correction is lesser
Thank you!
Hello,
Can anyone advise on this?
Thanks!