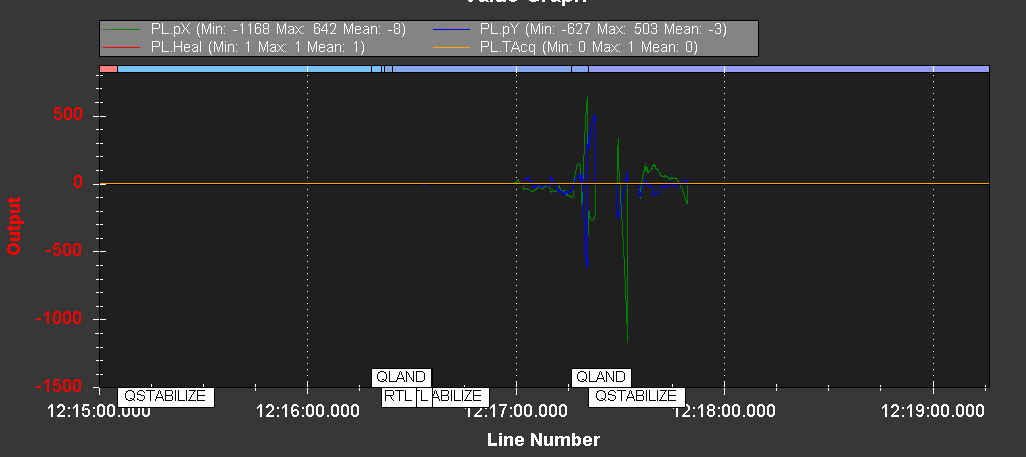
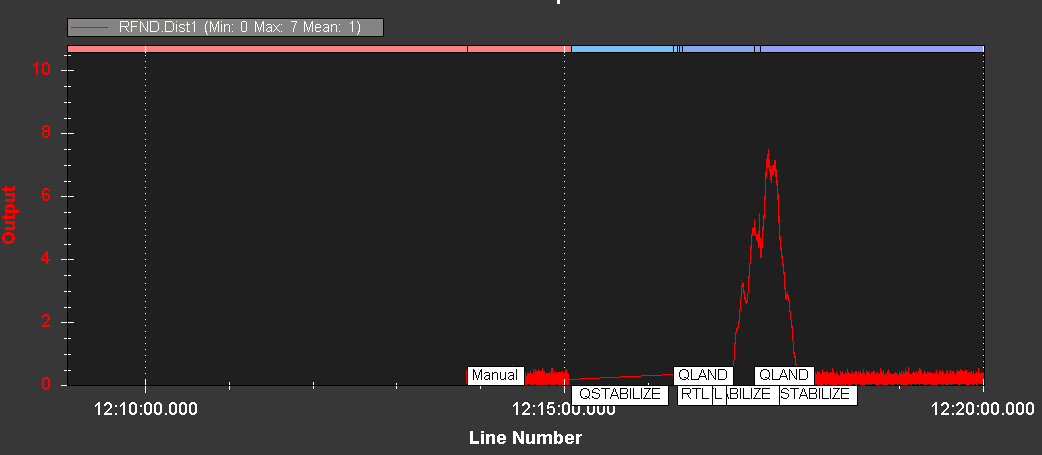
I have a quad plane (VTOL X8) .I implemented a precision landing in this drone using IR-LOCK beacon and a pixy camera but it doesn’t work well. I saw an erratically behavior when the drone looked for the beacon, because this one was near but VTOL went far away from it. I attached the log of those tests. I did 2 tests of precision landing and then changed the parameters to eliminate precision landing and flight the drone in AUTO mode. I’d like to know how to improve the movements in x/y( The values of px/py are high, you can see more details in the logs files). I tried changing the parameter PLND_EST_TYPE from 1 to 0 but it didn’t work as well as I expected. I don’t know if It is properly to modify the parameters Q_A_RAT_PIT_FILT and Q_A_RAT_RLL_FILT to obtain and slightly movement in roll and pitch.
In the pictures above you can see that I changed the mode from QLAND to QESTABILIZE because the drone was moving erratically and I took back the control of it for security.
@Paola_Casabona may i know is this a custom firmware? which source did u used? I used a custom firmware from @lukedempsey but somehow i didnt manage to get the ir lock sensor to sense the beacon upon the Qland mode. It just landed. I have a quadplane but the testing i conducted on a quadcopter but with the arduplane custom firmware.