Woah good eye!
I do have common grounds between the Pixy/SF11C to the I2C Splitter, but I lack the Ground Pin between the I2C Splitter and the PH2 Gnd Pin.
Let me rig that up and report back!
Thanks!
Woah good eye!
I do have common grounds between the Pixy/SF11C to the I2C Splitter, but I lack the Ground Pin between the I2C Splitter and the PH2 Gnd Pin.
Let me rig that up and report back!
Thanks!
Interestingly enough, the SF11C does seem to be reacting to the Markone IR Beacon.
I have conducted multiple tests.
Whenever the Markone is directly below the SF11C, the reading spikes up to Max (130) and stays there.
Remove the Markone, readings come back to normal.
This was actually a known issue. What version of the MarkOne beacon do you have? Versions 2 and 3 have a photosensor on them that is supposed to help with reducing interference with Lightware lidars (actually maybe just the SF20, not sure).
Hello Everyone!
@ThomasSFL My copter is seeing the beacon fine but it reacts so aggressively that it sometimes crashes 
PIDS in every other flight mode are really good and its flying very stable. I have max angle set to 30 degrees, but in PLND it seems to go over that.
Is there a way to calibrate how much it accelerates at the beginning when it first sees the Beacon? It is just in the first initial movement.
Thanks for the quick reply, I dont have it here but I will upload it tomorrow first thing in the morning.
Thanks!
@ThomasSFL Unfortunately there was no SD Card on the Pixhawk
I have the telemetry log but i don’t know if that works for you I’m attaching it here. In that flight we did a precision landing With EKF on and then at the end we attempted another one with Raw, thats where it crashed.
2020-01-21 17-20-36.tlog (344.0 KB)
@ddomit We will need a .log/.bin to do any meaningful analysis. The log will include the target detection data, rangefinder data, along with all of the other relevant copter orientation/sensor information.
I’ve seen a very similar behavior when the camera was upside down orientated. Is it properly orientated? also the LAG parameter produces something similar if not well tuned, but on my experience not that extreme. I guess you have the lag configured as default for IRlock right?
I didnt see the sd card but it was there! 
Yes camera is properly oriented and lag parameter is as default. One other setting that is default but which i think might help is PLND_ACC_P_NSE
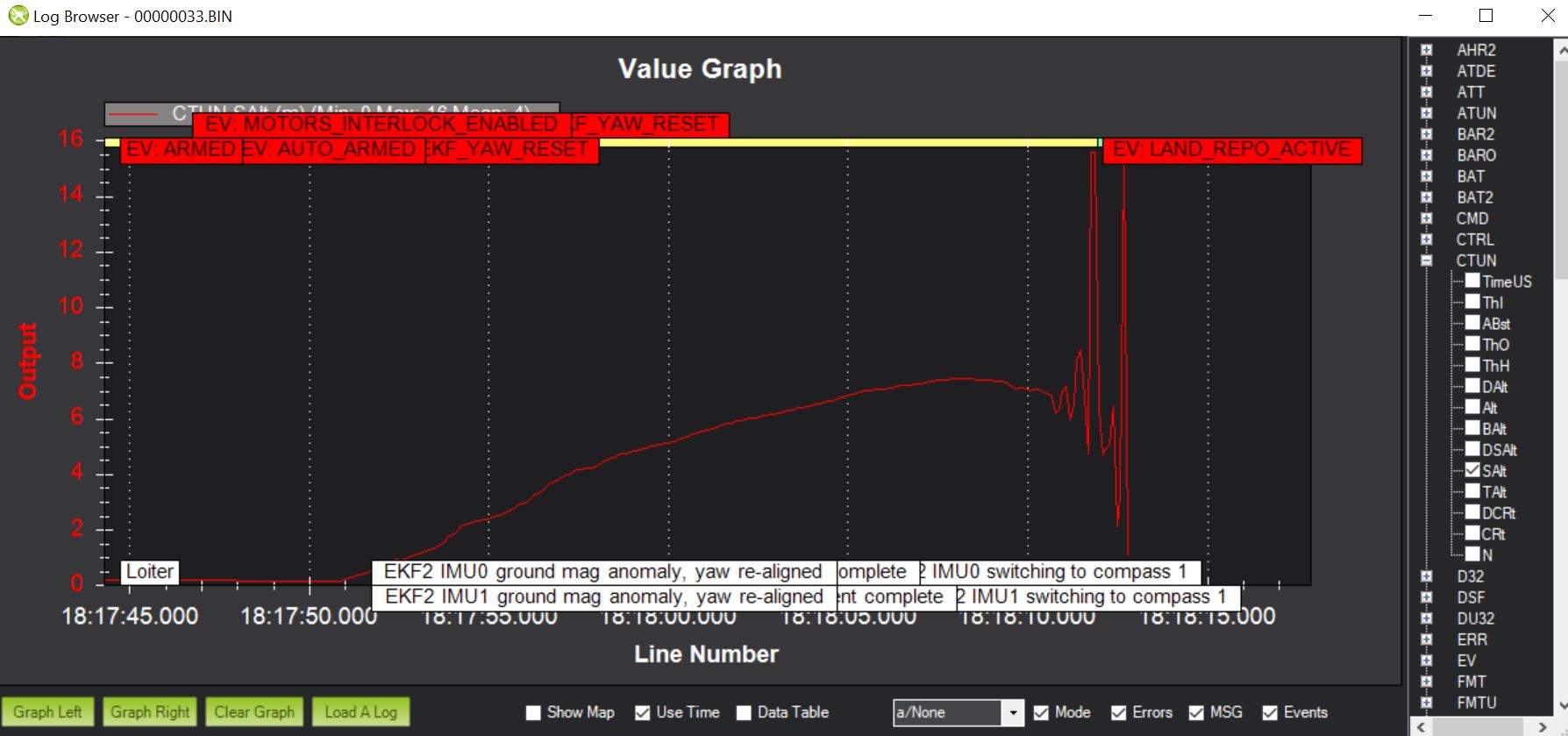
What I immediately noticed is that the rangefinder data on the final landing is very strange (see image below). At ~6m the rangefinder readings start to oscillate ALOT. This occurs during the final landing in the log, which I assume corresponds with the time of the crash.
This is significant because the Precision Landing position estimation (pX/pY) requires accurate rangefinder data. If the rangefinder data is off, then the PL position information will also be off.
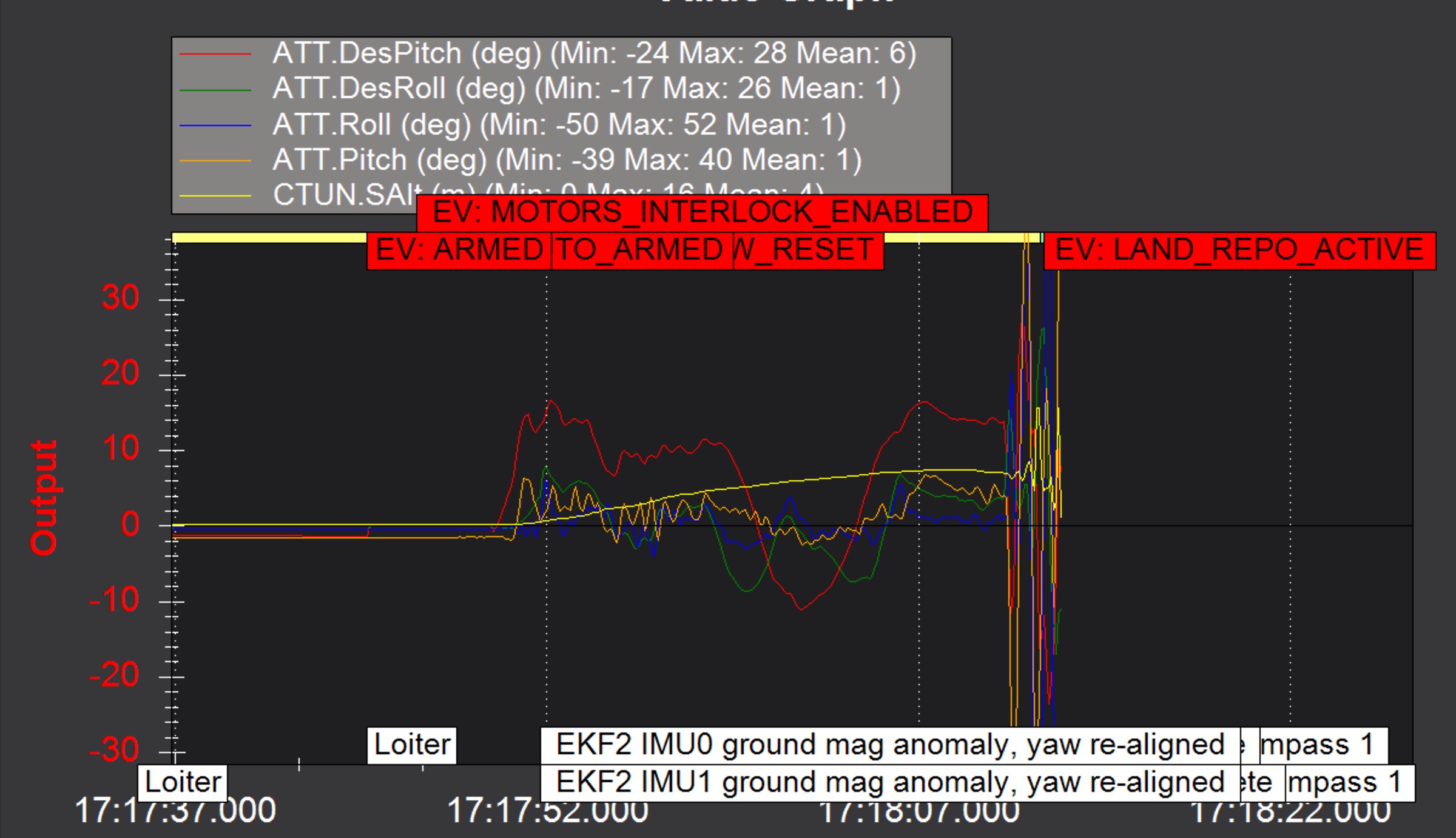
I think thats the exact time of the crash and the height varies because it was when it was almost spinning so the angle of the Lidar was seeing almost horizontally. I reviewed all the flight and lidar seems stable everywhere.
In this image you can see how its directly related to pitch/roll
Ok. I understand what you are saying.
It’s difficult to tell from the logs if the sensor itself is setup properly or not. I saw three ‘landings’ in the log, but I don’t think any of them were successful precision landings. If the sensor is still operational, you can use Pixymon to send me screenshots of the sensor parameters. Also, you can let me know if the MarkOne Beacon is detected via Pixymon.
After I check the detection, then we can move on from there.
Also, while we are at it, you could send me a picture of your drone/sensor setup, so I can confirm orientation and parameter settings. You can send it to me privately if you prefer.
Yes i will send you everything tomorrow Thank you very much!
Reviewing the logs im thinking it may be a PID tunning Issue, it seems to be underdamped
There was another user that had a similar issue (perhaps). The copter behaved erratically when Land was initiated. He re-tuned the copter, and re-set the parameters. It fixed the issue, but we did not figure out exactly what was causing the erratic behavior.
Best,
Thomas
Hi @ThomasSFL,
I have also been experiencing some issues with precision landing using Irlock but with Copter-4.0.1. With the vehicle approximately 10 m above the beacon, when I switch to land the vehicle started to pitch and roll erratically. I needed to switch back to loiter to recover.
The log of the flight can be found here:
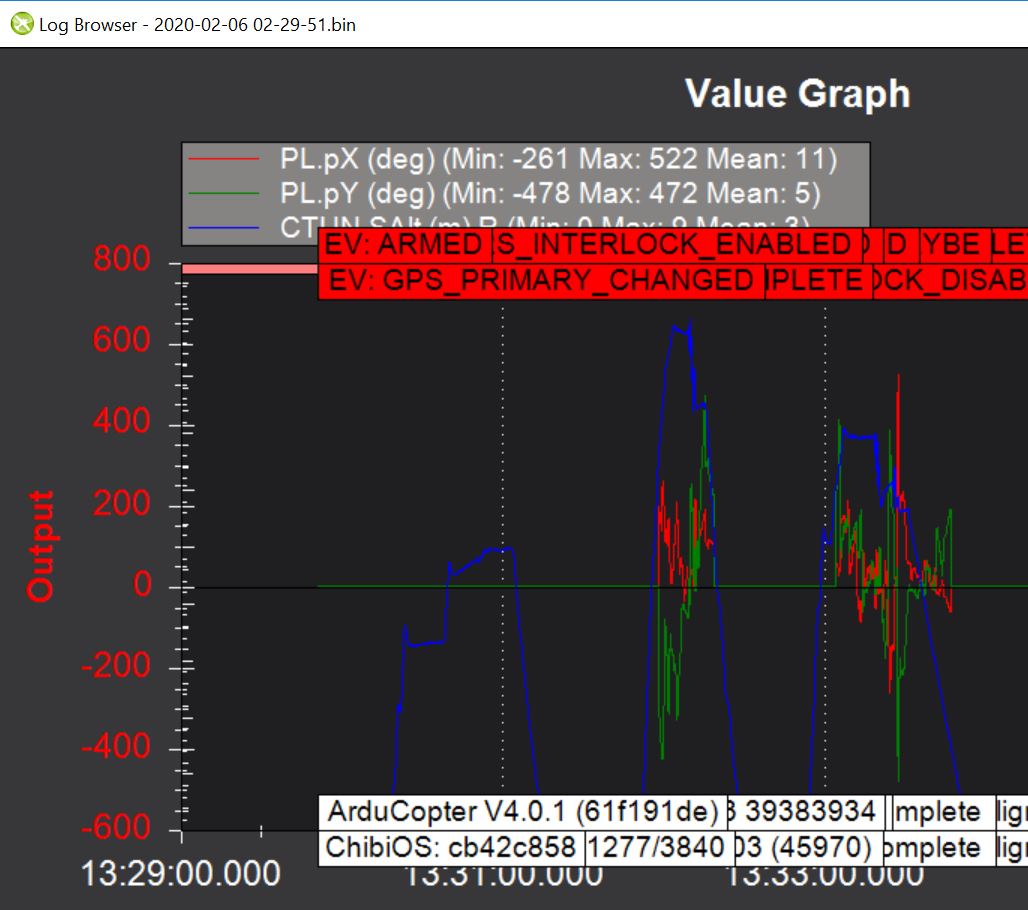
I conducted 4 takeoffs and landings. The second and third landings had the beacon within view of the pixycam. The TAcq shows that the pixycam have acquired the beacon, pX and pY are erratic. I don’t think there was interference of the lidar from the beacon. In loiter the vehicle can hold it’s altitude very well even when hovering close over the beacon.
Some details of the setup are:
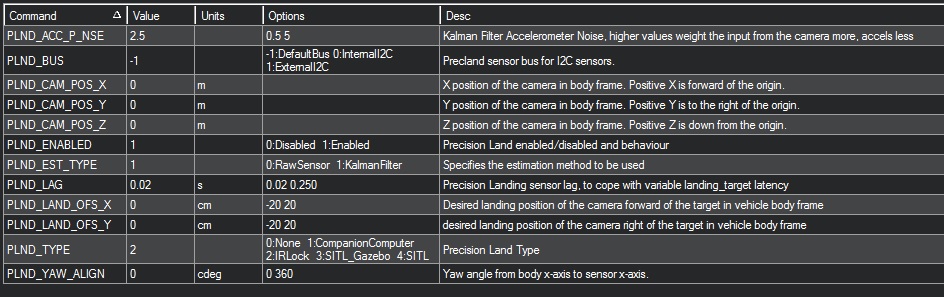
7.The PLND parameters are:
On a related note, I have worked with the irlock system around 2017 albeit with a slightly different setup and it worked flawlessly. Recently when I started working on it again on a few other vehicles with Copter-3.6 and above I begin to see some issues (not saying definitively that issues are firmware related). Some issues are:
Do you have any advise on how to diagnose the issues?
Thank you for your help.
Good Day @seth_poh,
Your log is showing erratic pX/pY readings. (see image below) So there is probably something wrong with the sensor setup. You can send me screenshots of the sensor parameters from Pixymon. Also, how is the sensor oriented with respect to the flight controller?
Also, I would also recommend changing PLND_EST_TYPE to 0.
Finally, you could re-set your copter parameters, especially if you haven’t done this since upgrading firmware. The only reason I recommend this is because it worked for somebody else.