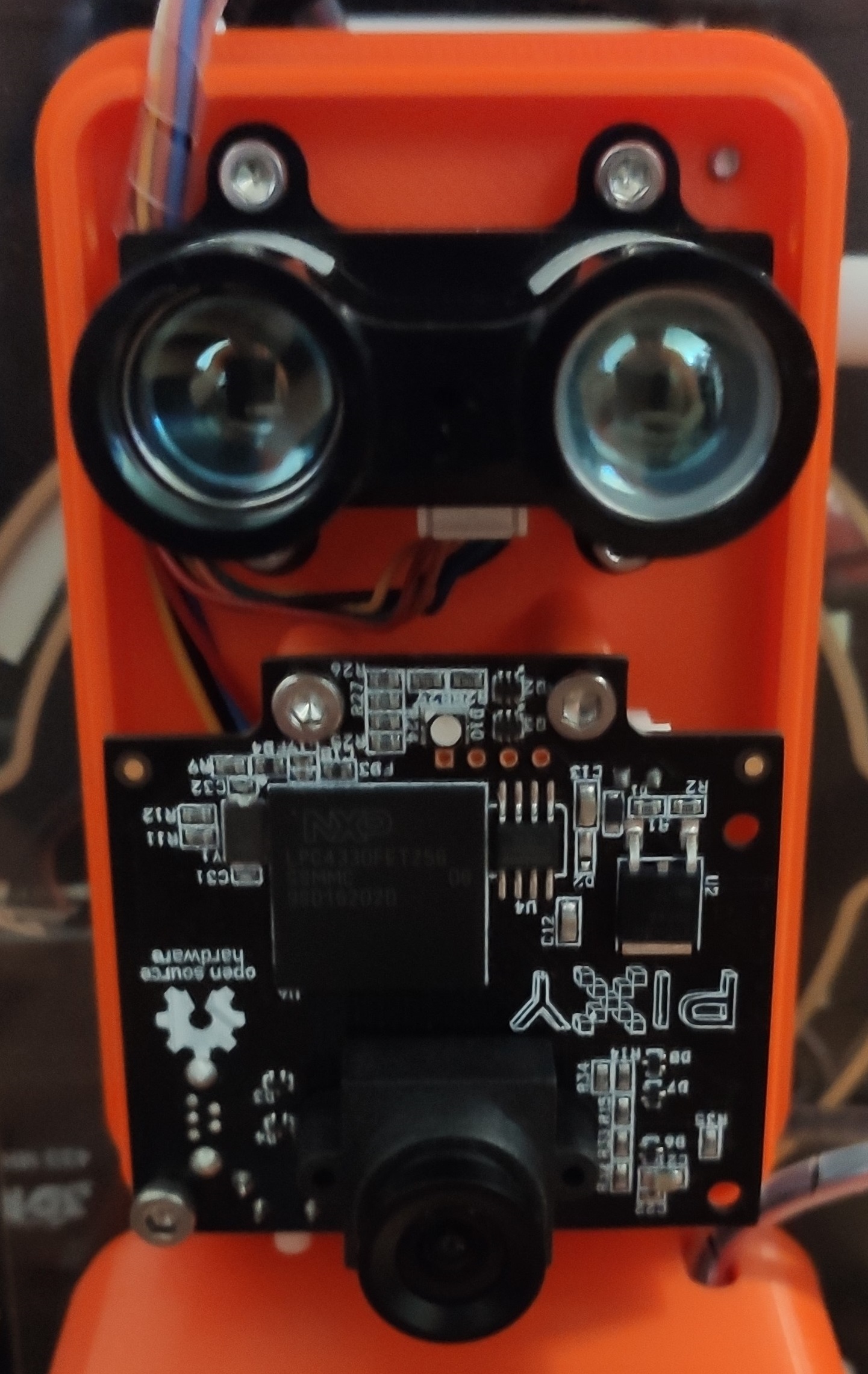
Thanks for the quick reply. I will give your suggestions a try later today. I have yet to reset copter parameters since I started using this particular pixhawk. Meanwhile here is the photo of the underside of the vehicle. Top of the photo is the front of the vehicle. The Pixhawk is mounted ‘nominally’ with the front and top of the flight controller aligned to that of the vehicle.
On a related note, the latest version PixyMon does not seem to be compatible with the irlock firmware. It can’t detect the camera with the irlock firmware. I am using an old Pixymon version (1.0.2) here.
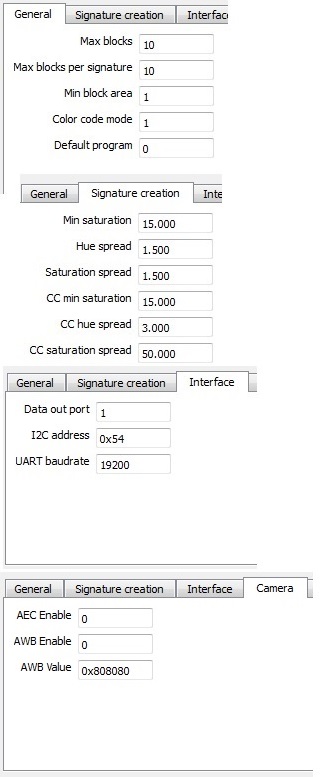
Thanks. The sensor setup looks good from what you have sent me. You could use Pixymon to double-check.
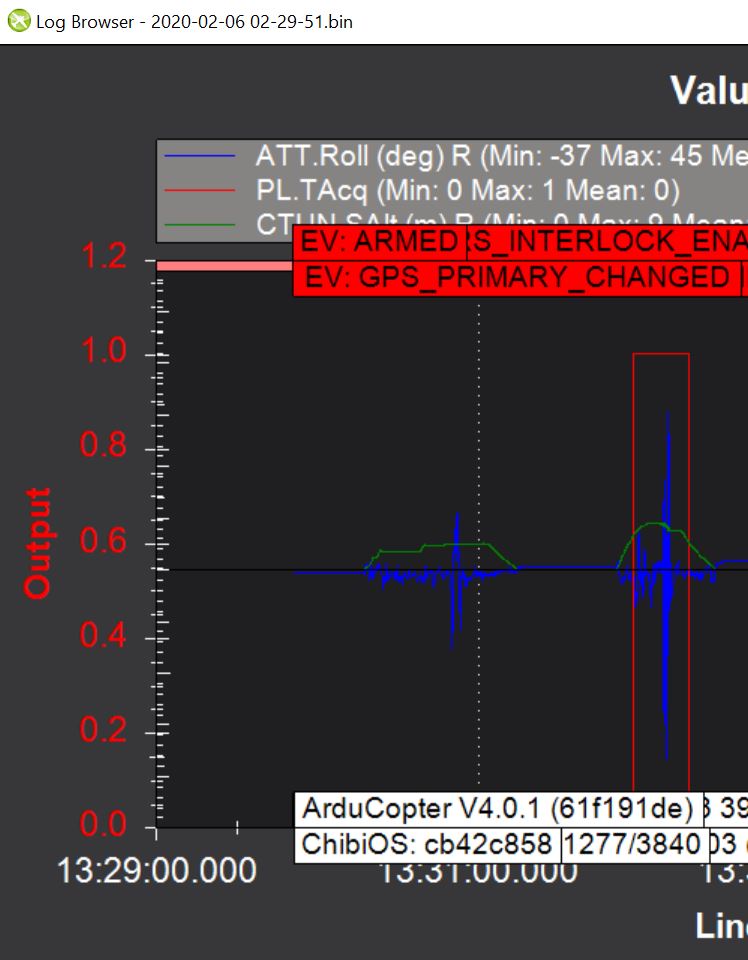
What I have also noticed that there is some erratic pitch/roll even when the beacon is not in-view. See log image below. The issue becomes worse when the beacon is in-view, but this could still be an indicator of poor tuning which is then being exacerbated by the PL automated controls. (also, I would still recommend trying PLND_EST_TYPE to 0 just to see what happens)
I did a reset of the parameters, and set PLND_EST_TYPE to 0. Unfortunately the issue remains, the vehicle is stable in loiter about 10 m above the beacon. I could see that from the indicator light on the pixycam that it acquired the beacon. The moment I initiated land the vehicle started pitching and rolling erratically. The logs can be found here -
Comparing the parameter before and after reset did not reveal anything wrong. Only slight irregularity was that AHRS_GPS_USE was set to 0 previously. PID are now at stock values.
Hi @ThomasSFL sir,
Hope you are doing well.
I am facing issue in Precision Landing, mission planner shows BAD VISION POSITION What may be the possible reasons.
I am able to setup my pixy camera and firmware (attached my output) i am using PixyMon version 1.0.2
Pixy firmware version (queried) 1.0.1
and MarkOne_1.0.1.hex firmware
I have set params also.
I have not attached any rangefinder now , There is no proper documentation of attaching rangefinder although i have TF02 from benewake.
I have since loaded Copter 4.0.2 and done an autotune. The vehicle (F550) is still flying erratic when land mode is called both with PLND_EST_TYPE = 0 and PLND_EST_TYPE = 1. The pX and pY seem to converge for a moment, overshoot, and stay constant. The log can be found here -
On another note, I am also using Irlock on another of my vehicle (Tarot X8). I sort of got it working there. The only issue there is that the vehicle snap violently to over the beacon. I have seen this behavior from Copter 3.6 onwards. I would imagine in a poorly tune vehicle, it might overshoot the beacon. I have seen this being reported on some earlier posts. The last time I used Irlock was back in 2017 with Copter 3.4 I believe. There the vehicle (F450) flew smoothly over the beacon -
I am just wondering whether you are aware of any changes in the Copter 3.6 onwards that might cause this.
Hi [@ThomasSFLUploading: 2020-02-19 16-58-12.log… ](https://discuss.ardupilot.org/u/thomassfl) I heve kept PLND_BUS to -1 (It solved the problem of bad vision position)
My drone is sometime working fine but not able to completely acquire the target ( I have checked the logs TAcq is very much fluctuating between 0 and 1 ) I have attached the logs for your your kind consideration. Heal is showing correct , I am not able to find the actual reason for this much fluctuation. What are the possible reason for this.
Most of the attempt drone fails to land on MarkOne Beacon , I have attached sonar range also (TF02 Lidar)
Most of the landings in the .log start at around ~5 meters. It is probably better to perform the test starting at ~10-15 meters.
I think there may be 1 attempt starting at 10+ meters, but there is not any detection indicated during that landing. If that is still the case in your further testing, you need to inspect the sensor detection via Pixymon (according to the tutorial). After configuring the sensor and adjusting the lens, you should get consistent detection at ~15 meters distance.
We have seen many successful commercial projects using the latest ArduCopter firmwares.
However, as I mentioned previously, I also saw a copter that responded erratically when upgrading firmware. We never determined exactly why it occurred. He simply re-configured everything from scratch, and it started working.
On the 1st copter, you could consider rolling back the firmware (just for temporary testing) to see if that is causing the issue for you. Also, I can’t view the video for some reason, but you could consider limiting the roll/pitch on the 2nd copter if you think it is too aggressive.
@ThomasSFL thank you for the response i have already checked the sensor with pixymon and that is working fine and i have adjusted the the lens accordingly, I have attempt many test for the precision landing. I feel like sometime it is accruing the target and tries to land but again it leaves the target(but i am not sure of it) even i have checked with 15 meter altitude.
Hi @ThomasSFL - if you could spare a moment please could you take a look a the attached log.
We are using a Pixhawk 2.1 Cube (With Quad 3.6.8) - No error messages from lidar or “bad vision positioning” and the logs show Heal as 1 and Tacq as 1 however the drone does not try land over the beacon.
Its annoying as I did have the system working 2months ago but it had to be stripped down and reset for something else…
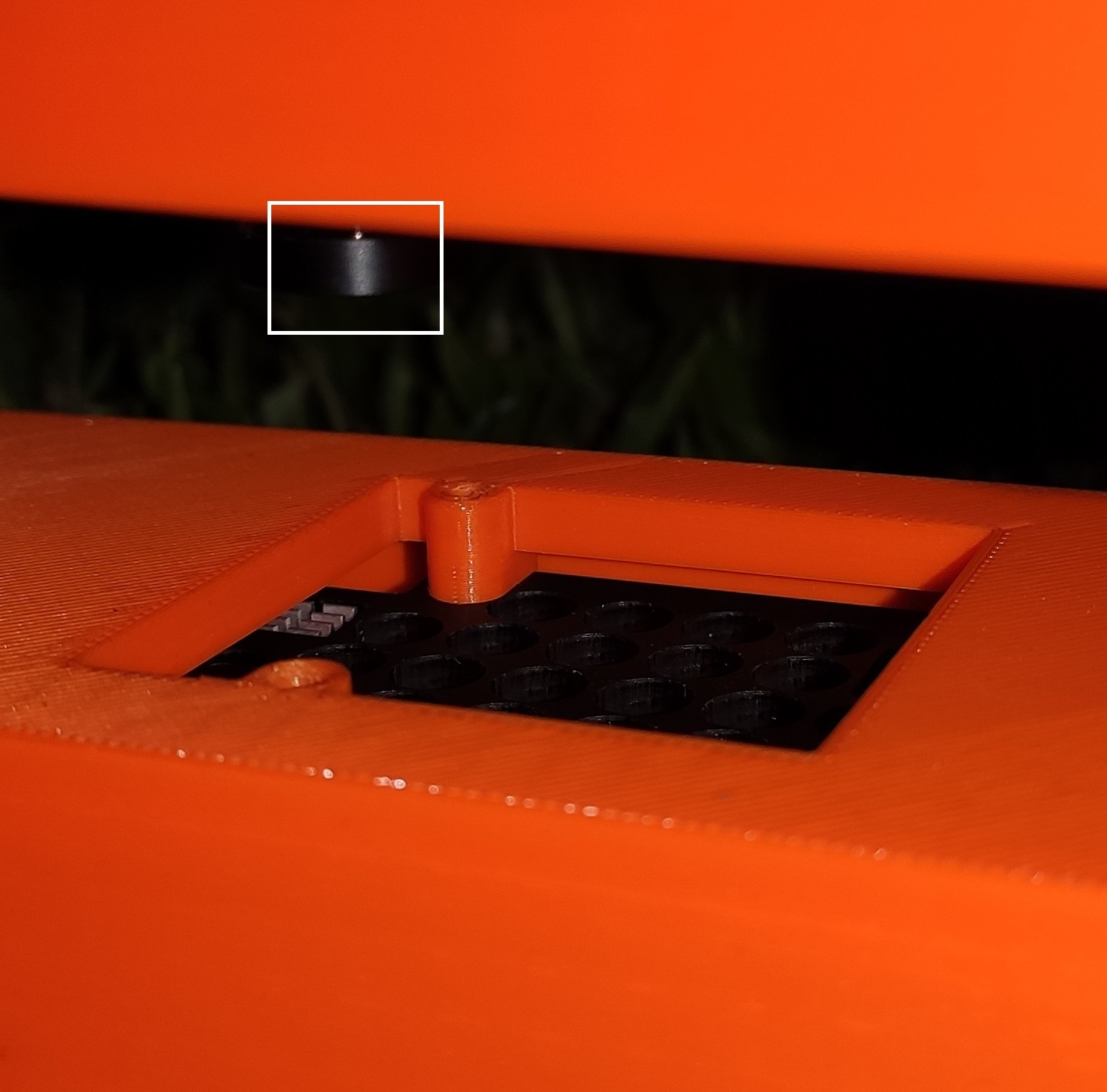
I have resolved the issues that I was facing. It was rather embarrassing actually. The camera was mounted back to front in the enclosure. The white button on the Pixycam should be facing the front of the vehicle. Setting PLND_YAW_ALIGN to 180000 (cdeg) resolved the issue. I was able to get 6 out of 6 prefect landing with PLND_EST_TYPE = 1 and PLND_ACC_P_NSE = 0.5. yesterday. For most of the landings the camera was right over the beacon.
I guess the issues I had with my other vehicles were due to a combination of poor tuning and/or camera orientation. Will be reviewing the photos from those tests to find out.
Just to let you all know I managed to solve the issue from above; I found it to be a damaged connector on the Pixy camera board (Large black connector for I2C communication to Pixhawk); a couple of the header pins had very slightly lifted from the main board. I was able to re-solder the connector and with the following setup and parameters all worked well.
Setup:
Pixhawk 2.1 Cube Black
Arducopter 3.6.8
Mark One Beacon
Pixy Camera
Benewake TFMini LiDAR
Pixy camera is powered via the Pixhawk I2C port.
LiDAR is connected to the GPS 2 port (serial 4)
Parameters:
PLND_Enabled: 1
PLND_Bus: 0 (when set to -1 or 1 the bad vision position message would appear on the HUD)
PLND_EST_TYPE: 1
PLND_Type: 2
You can use parameter PLND_ACC_P_NSE to “tune” the stability of the drone in landing - with a S500 10” quad opted I found a value of 0.5 worked best.
Hopefully this will help any others having some configuration issues.
I have Irlock working in precision loiter and land but for some reason when I do an RTL it does nothing with the IRLock, it lands as if there were no beacon there, any ideas??