New quad new problems.
coolyguy.param (20.3 KB)
FC is a Holybro KakuteH7 v1.3. Rx is an Anyleaf ELRS dual-radio Receiver. Rangefinder is on a Matek 3901-L0X. RC controller is a Radiomaster TX16S.
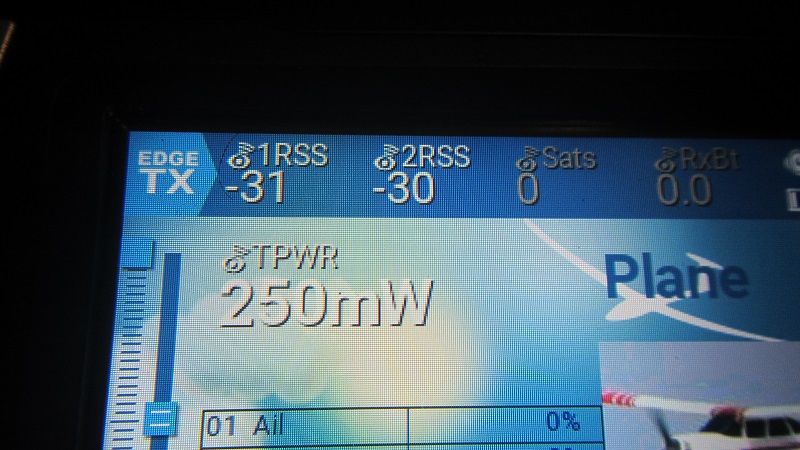
The radio and receiver can see each other. I get RSS values back from the receiver on the radio’s display screen.
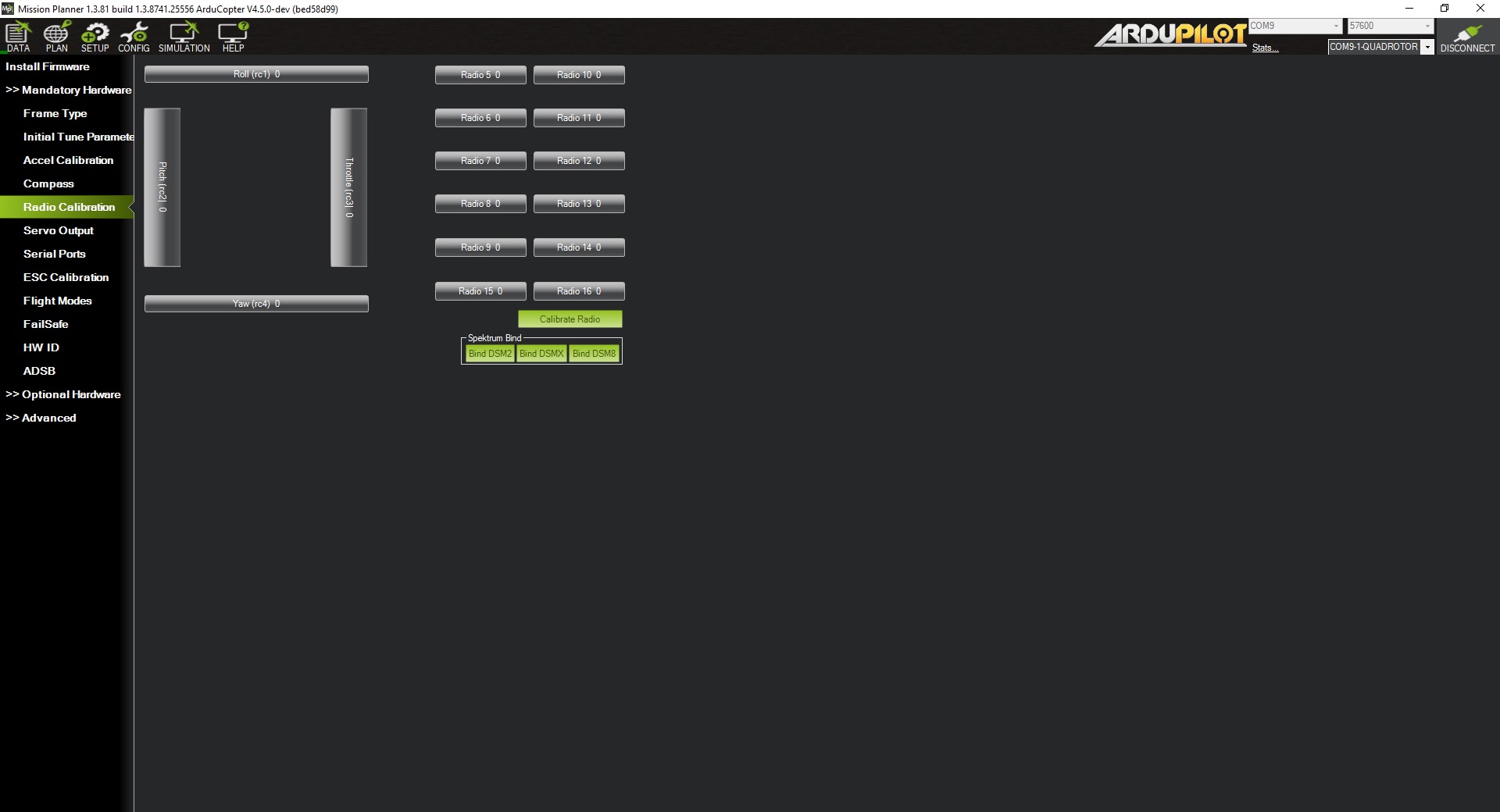
But prearm says it can’t see the radio, and the radio calibration screen doesn’t show any green bars.
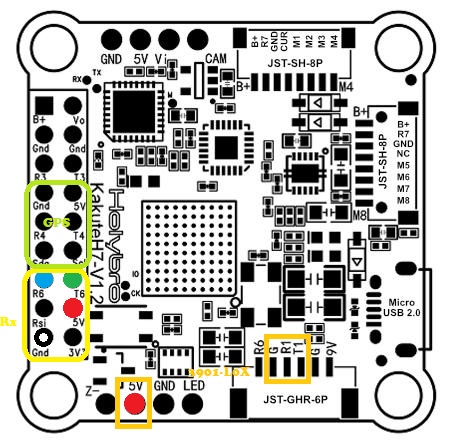
Connections are as per
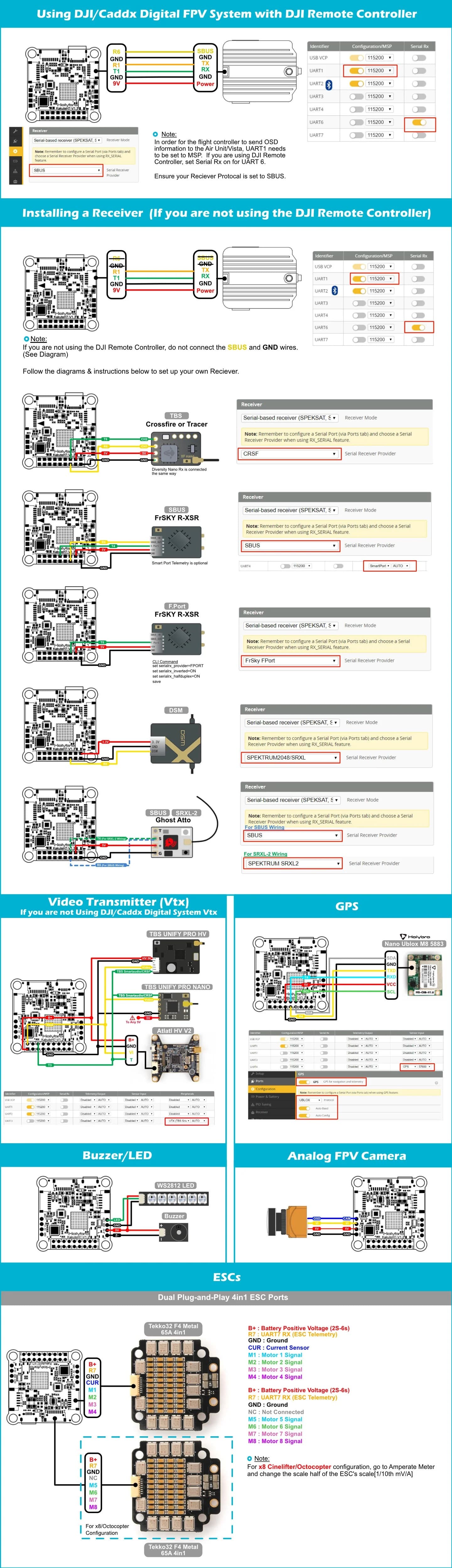
Save for I don’t have a DJI air unit. Serial1 is instead being used for the 3901-L0X via a JST SH 6 pin connector.
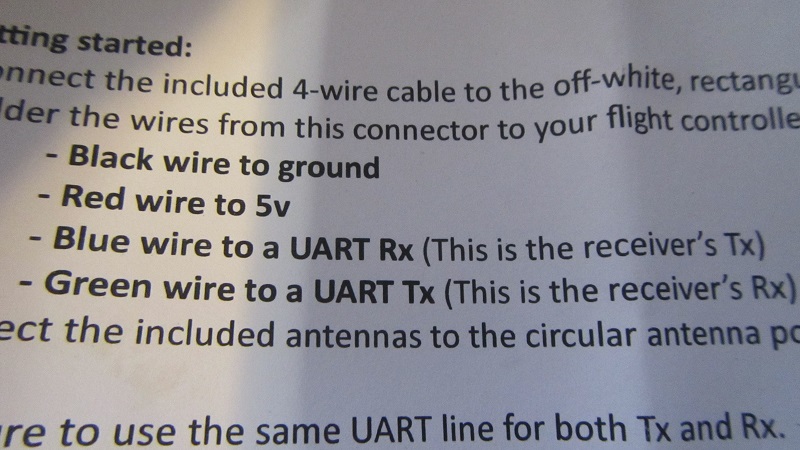
Rx is wired per instructions
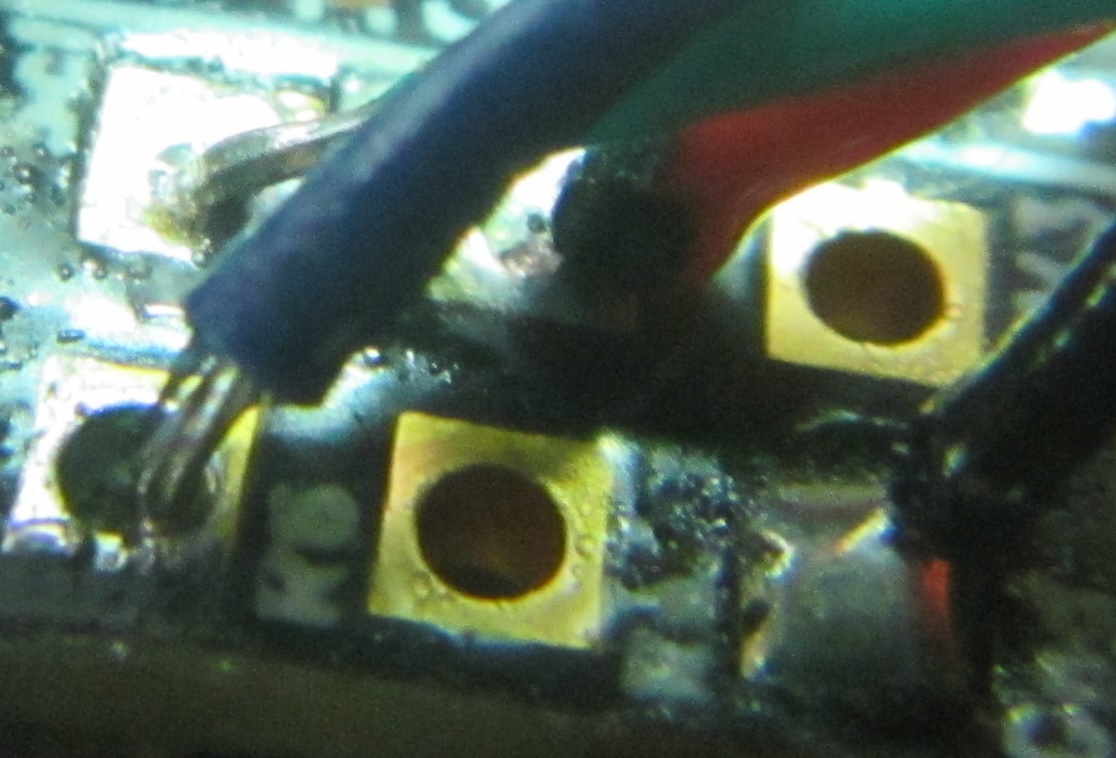
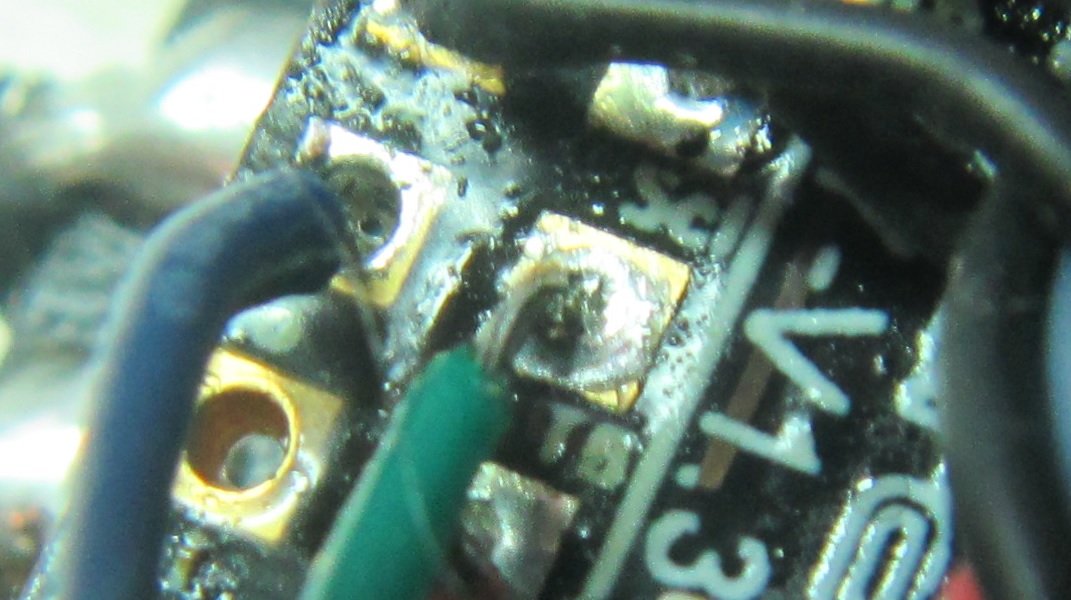
I believe I have everything wired correctly. I managed to get the GPS/compass working and each of the associated wires is black - no color coding to assist. I checked the wires before soldering and checked them again afterwards.
Also this radio works fine with a different Rx on a pixhawk 2.4.8, which is also ELRS, so I don’t think there’s a problem with the radio. I flashed the Rx’s firmware and it’s set to the same binding phrase as the radio.
I’m a little bit confused by the wiki page Holybro Kakute H7 V1 — Copter documentation. It says "The R6 pin, which by default is mapped to a timer input, can be used for all ArduPilot supported receiver protocols, except CRSF/ELRS and SRXL2 which require a true UART connection. However, FPort, when connected in this manner, will only provide RC without telemetry.
To allow CRSF and embedded telemetry available in Fport, CRSF, and SRXL2 receivers, the R6 pin can also be configured to be used as true UART RX pin for use with bi-directional systems by setting the BRD_ALT_CONFIG to “1” so it becomes the SERIAL6 port’s RX input pin.
So ELRS doesn’t work on serial6, unless you set BRD_ALT_CONFIG to “1”, which I have done. But it still doesn’t work. Could anyone please look at this parameter file and tell me what I missed?
coolyguy.param (20.3 KB)
Thank you