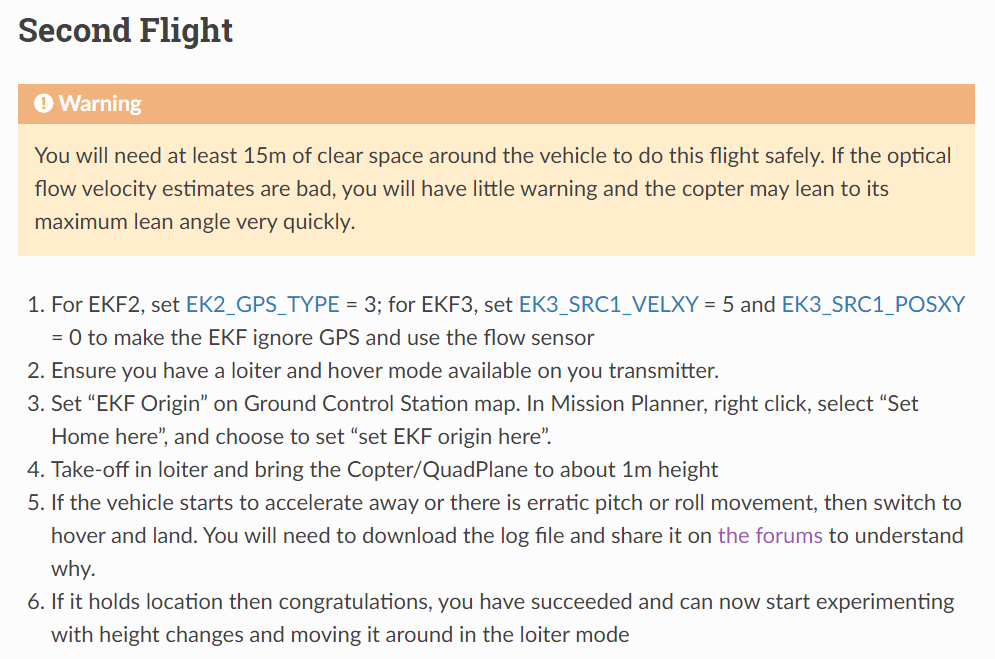
Helo i am configuring a matek OPTICAL FLOW & LIDAR SENSOR 3901-L0X, I already have the rangefinder working and now i am configuring optical flow sensor, i followed all steps on Optical Flow Sensor Testing and Setup — Copter documentation
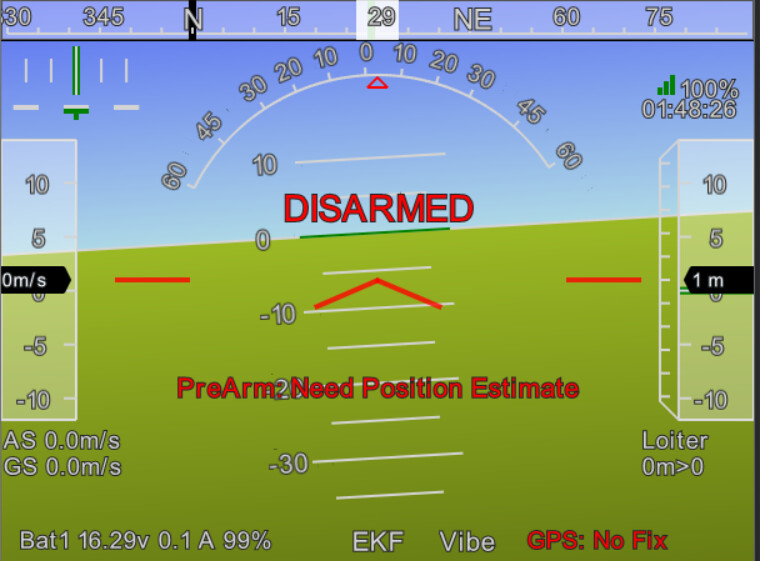
i receive data from the sensor and i already calibrated it, but the problem comes on the Second flight step
Notice the message GPS:No GPS. You need to sort that out. If you are indoors then the GPS may not be getting enough signal to get a position. Or if you are powered by USB the GPS may not be powered up and needs battery to be working (depends on your flight controller)
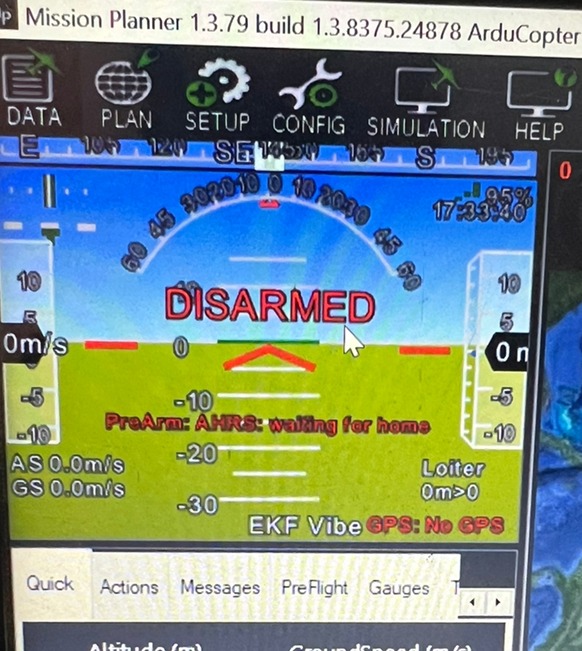
But I’m not using the GPS with pixhawk 2.4.8 flight controller and when i armed it gives an error of AHRS waiting for home…! or with GPS it shows green light and not armed and error of GPS not fix…
You need to be outside with a clear view of the sky. Especially if the GPS module hasn’t had a full lock recently it will be a “cold” start and that just takes time.
Khalil_Rehman
I’m not sure about my method, but I’ve solved it before.
In my case, the preARM condition was not released due to vibration (LIDAR) of the vehicle against external devices when the preARM condition was as shown above.
In some cases, the IMU determined that the vehicle was constantly moving and prevented ARM from being attempted, so I personally held the vehicle fully horizontal and stood by.
And these problems are also believed to have a significant impact on surrounding obstacles (such as metals).
I also faced the same issue, but try to lift the drone to 1m in disarmed state and slightly move the drone in pitch and roll axis. The pre arm error will be gone. and you can start flying. I suggest to fly the drone few meters above the ground.