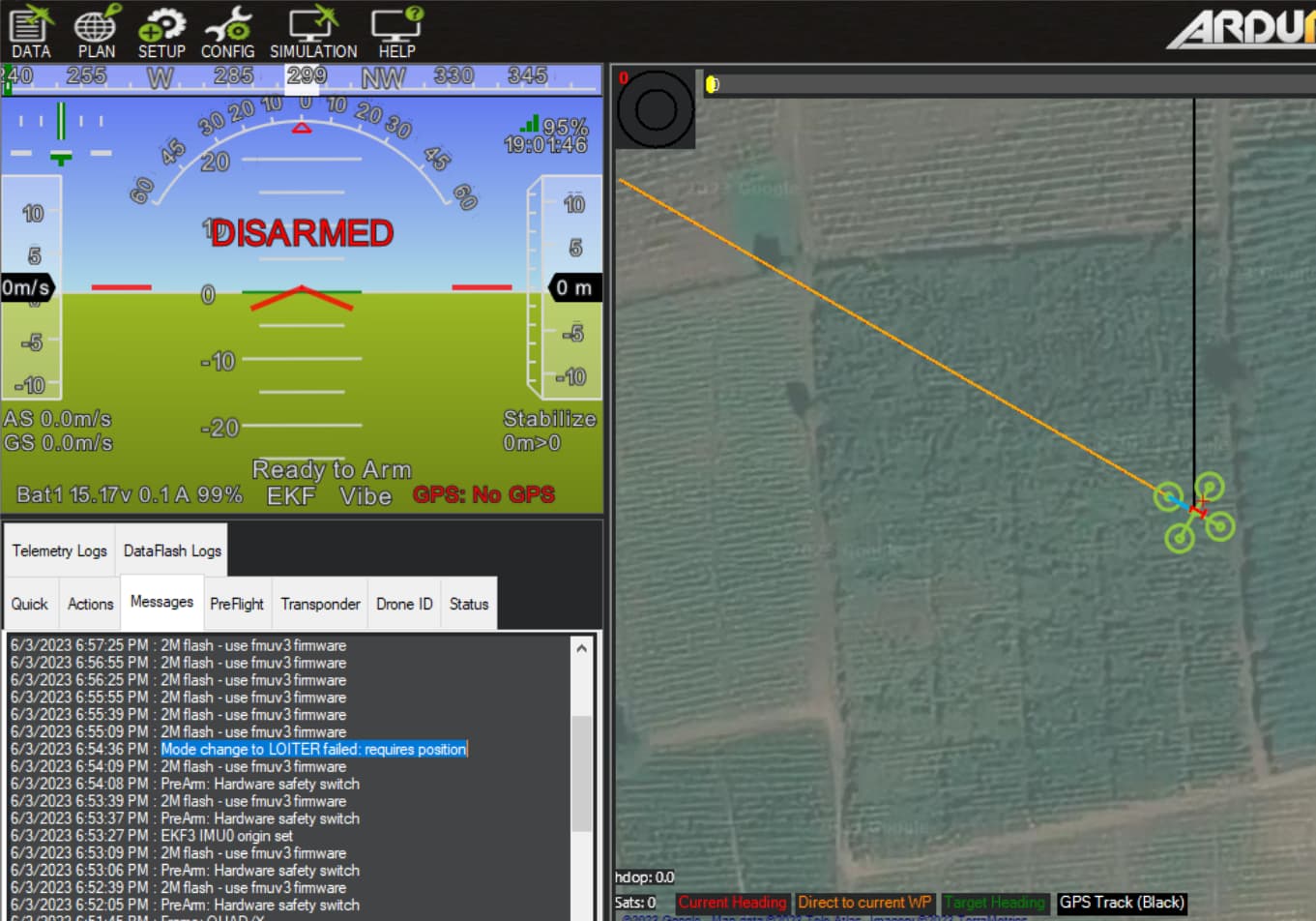
Do you mean this message: 2M flash - use fmuv3 firmware
It actually also came before I installed PX4flow and the quadcopter work fine in loiter mode as well as with all mode with the GPS module. But Im ignoring it because all works fine.
But after updating to fmuv3 and Arducopter V4.3.7 I am facing similar error: Mode change to LOITER failed: requires position.
Yes @Yuri_Rage I am trying to do the second flight only and in order to do the second flight as mentioned in 4th number I have to take off in loiter mode. So after ARM in stabilize mode, I change it to LOITER, and at that time this error occurs: Mode change to LOITER failed: requires position. Even after successfully followed 1,2 and 3rd steps.
Here I have shared 3 files via Gdrive, 1st one is 3 1-1-1980 5-30-00 AM_1stF.bin which is the 1st test bin file. 2nd one 7 1-1-1980 5-30-00 AM_2ndF.bin which is 2nd test bin file where I am getting error and 3rd one is Quadcopter_P.param file.
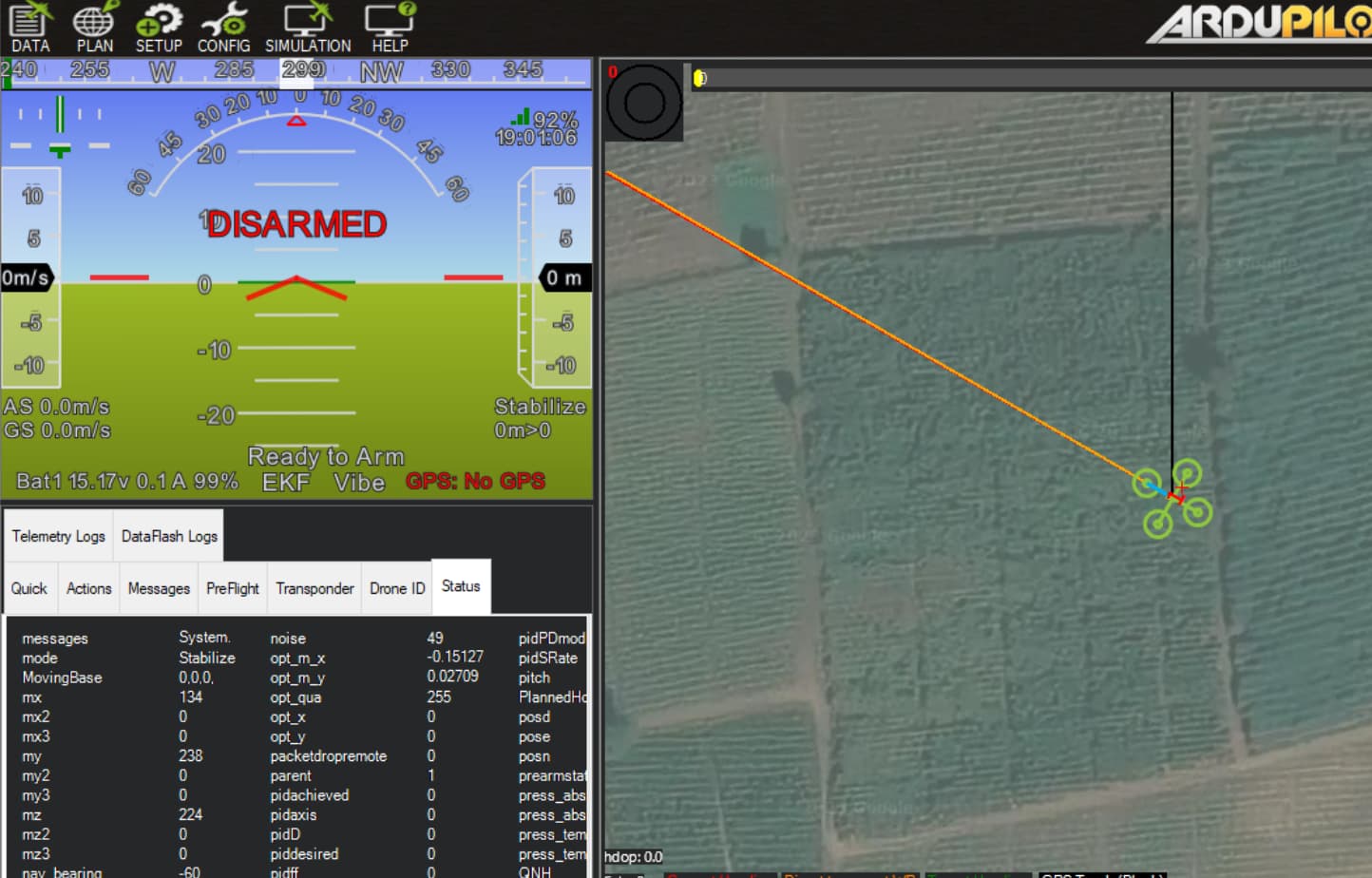
I have successfully completed the 3rd step and after that only in the attached screenshot drone and coordinates visible are visible in the map(right side).
Would you like to give your comments on this problem?
Actually, I have been working on to setup PX4flow to pixhawk for the last 2 months. After changing versions of the mission planner, and the firmware of Copter and also went through all the possible Ardupilot and GitHub discussions. When I finally didn’t get any solution then I have start this new discussion.
So I will be glad if anyone could help me with this problem.
It will only be possible to use the loiter flight mode with the Px4 flow if you have also installed a Lidar facing downwards, without the Lidar it is not possible to use this mode. Test it out in FlowHold mode.
Thank you much for your reply I am actually not aware of FlowHold mode. But now I will try it.
And @Yuri_Rage I have seen that note just after I ordered that pX4flow. And I also regret that But then I thought somehow I can use that sonar as a separate rangefinder but now I don’t know exactly how.
So can anyone suggest that if I desolder that sonar and then I use it with the IC2 port as mentioned here so it will work or the whole PX4flow will be damaged? Because as of now I am not able to purchase a new lidar lite v3. This is the Sonar which use in PX4Flow.
I will be glad if someone can give their suggestions on it.