I have logs from yesterday that were collected with LOG_DISARMED enabled that I’ve uploaded to Google Drive. The one I’ve linked here includes the following from LogAnalyzer:
Found NaN in POS.RelOriginAlt
Found NaN in STER.LatAcc
Found NaN in THR.Speed
There are a variety of other logs I can link to if that would help.
I will grab some logs later today with REPLAY and BUFSIZE included.
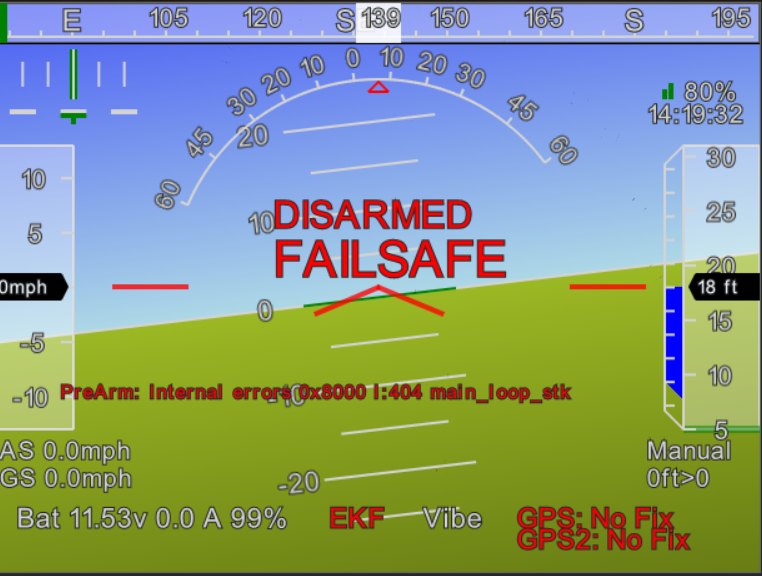
I worked with the rover for 2+ hours trying to get it online for some tuning to no avail. Every boot included the internal error despite reloading Rover 4.0 and then Rover 4.1 on the off chance that something was corrupted in the firmware, but no dice. With no information on the source of the fault I don’t know if this is a hardware or software issue, but I’m dead in the water until a solution is found.
As an aside, I did get a build environment set up in WSL, forked the source, and successfully built Rover from source, so I can test code changes if that becomes necessary.