So a fun new message showed up today as I got outside to tune some PIDs. Uncertain where this belongs so I thought I would start here, but please move it to the appropriate forum if this isn’t the place.
Throttle disarmedEKF3 IMU1 is using GPS
EKF3 IMU1 yaw aligned using GPS
Cruise Learning failed
Cruise Learning started
Cruise Learning started
Throttle armed
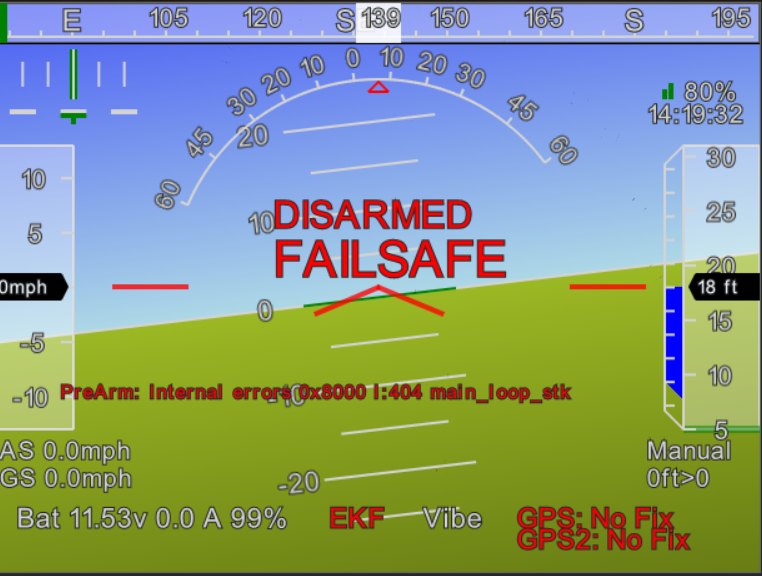
PreArm: Internal errors 0x8000 l:404 main_loop_stk
EKF3 IMU1 tilt alignment complete
EKF3 IMU0 tilt alignment complete
EKF3 waiting for GPS config data
EKF3 waiting for GPS config data
GPS 2: detected as u-blox at 460800 baud
GPS 1: detected as u-blox at 460800 baud
GPS: u-blox 2 saving config
PreArm: Internal errors 0x8000 l:404 main_loop_stk
EKF3 IMU0 origin set
Calibrating barometer
Throttle armed
Initialising ArduPilot
IMU0: fast sampling enabled 8.0kHz/1.0kHz
RCOut: PWM:1-10
fmuv3 003C0019 30375105 36383839
ChibiOS: 331fe75d
ArduRover V4.1.0-dev (8b8029fd)
Any insight appreciated. A few days ago the FMU wouldn’t boot after requesting a soft reboot. Had to reload the board from scratch from the bootloader, so I am guessing it might be related. I have telemetry and binary logs if they will help identify what I’ve done wrong 
Thanks!
-Todd