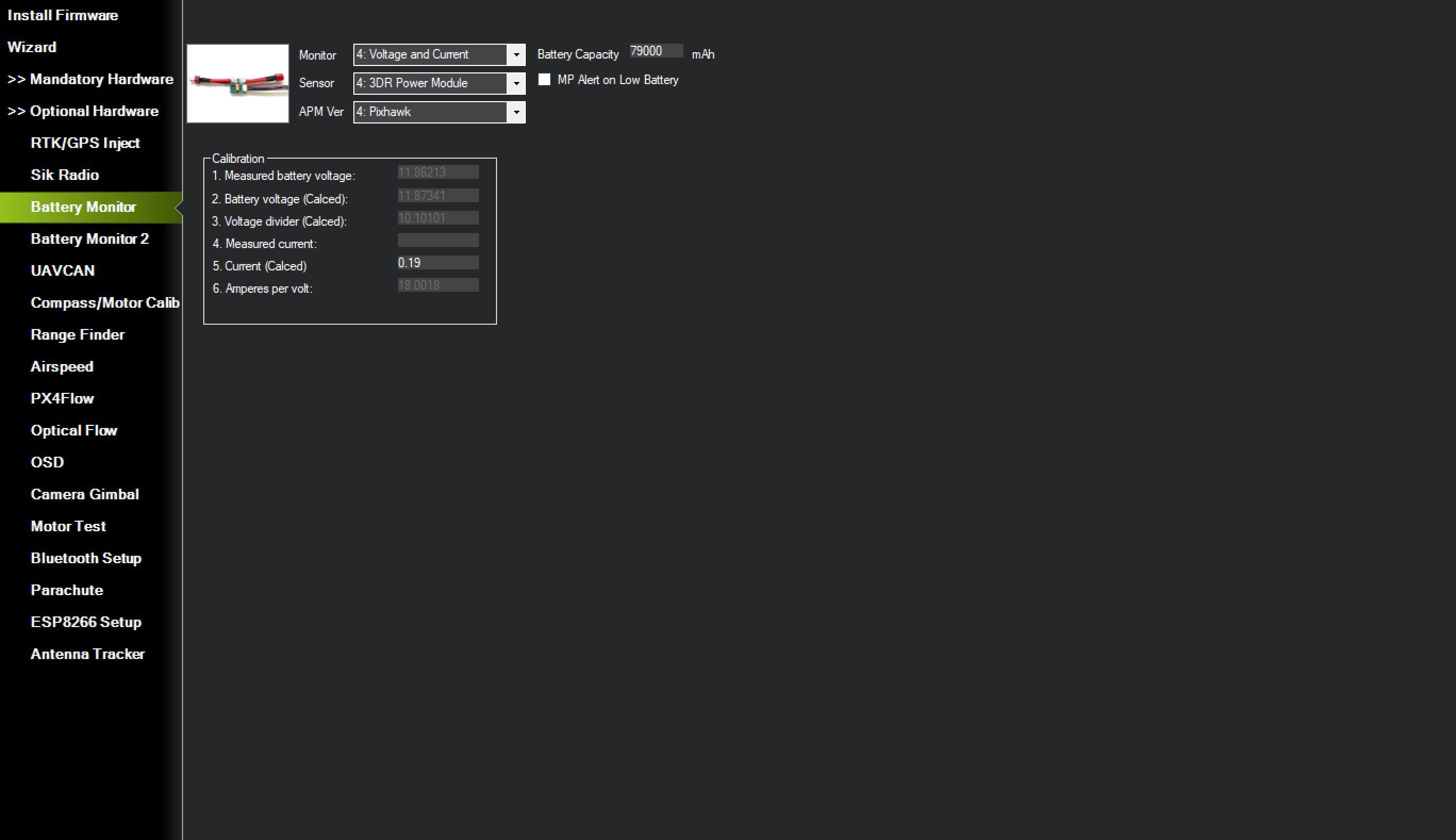
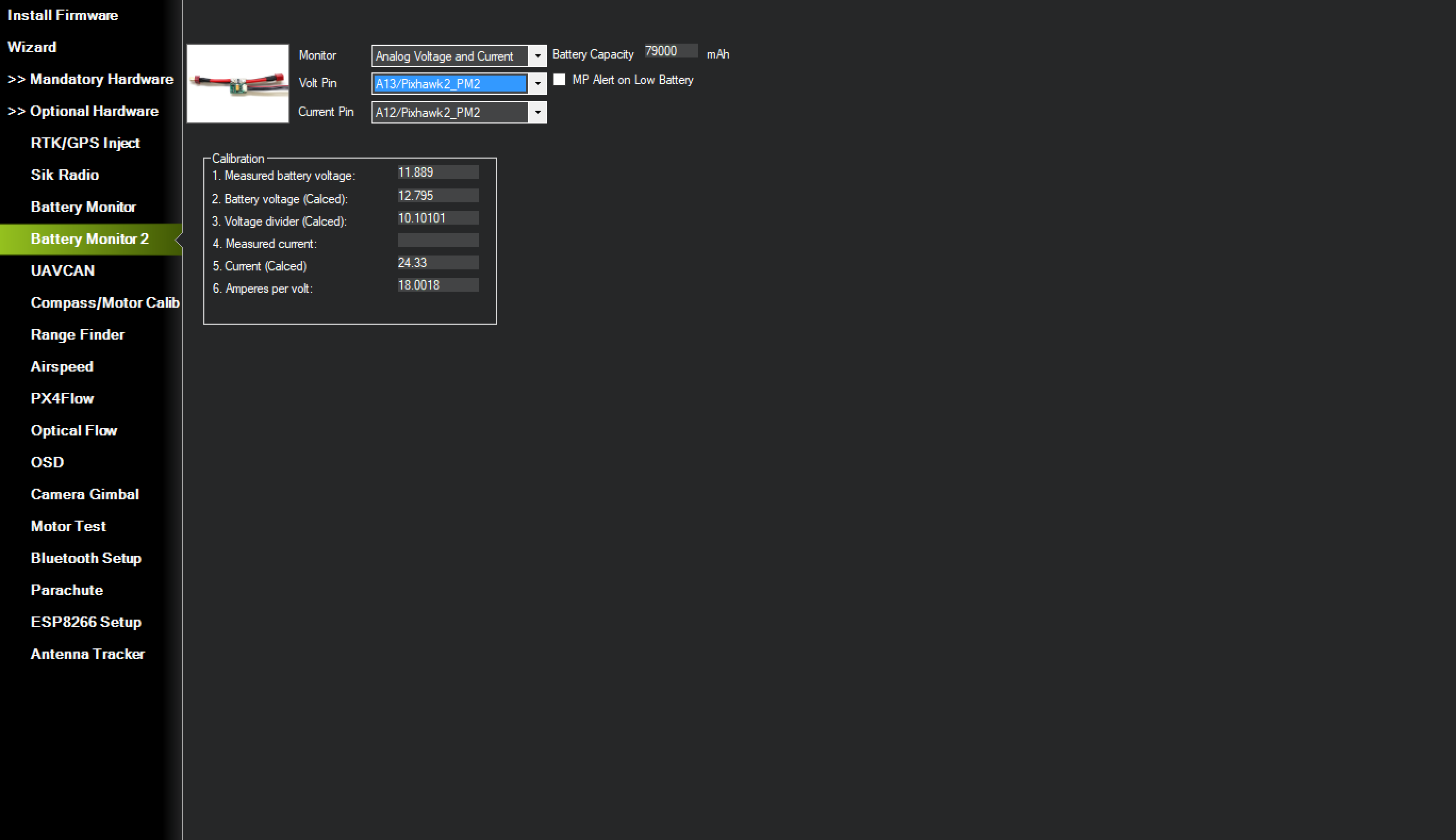
The voltage was quite a bit off and I wasn’t seeing any current. Should I be manually setting the parameters for A12/A13 in the parameter tree and then doing all the calculations? I’ve done that a few times and have got some inconsistent results when I reboot the system.
I never got it figured out so I reverted back to my old 3DR power modules. Those work just fine. I know some other folks were having problems getting current readings too: Battery Sensor Current Reading Error
Anyone manage to sort out the issue with the power brick mini? I have the same problem - can get voltage but no current. Tried two different power bricks with same result
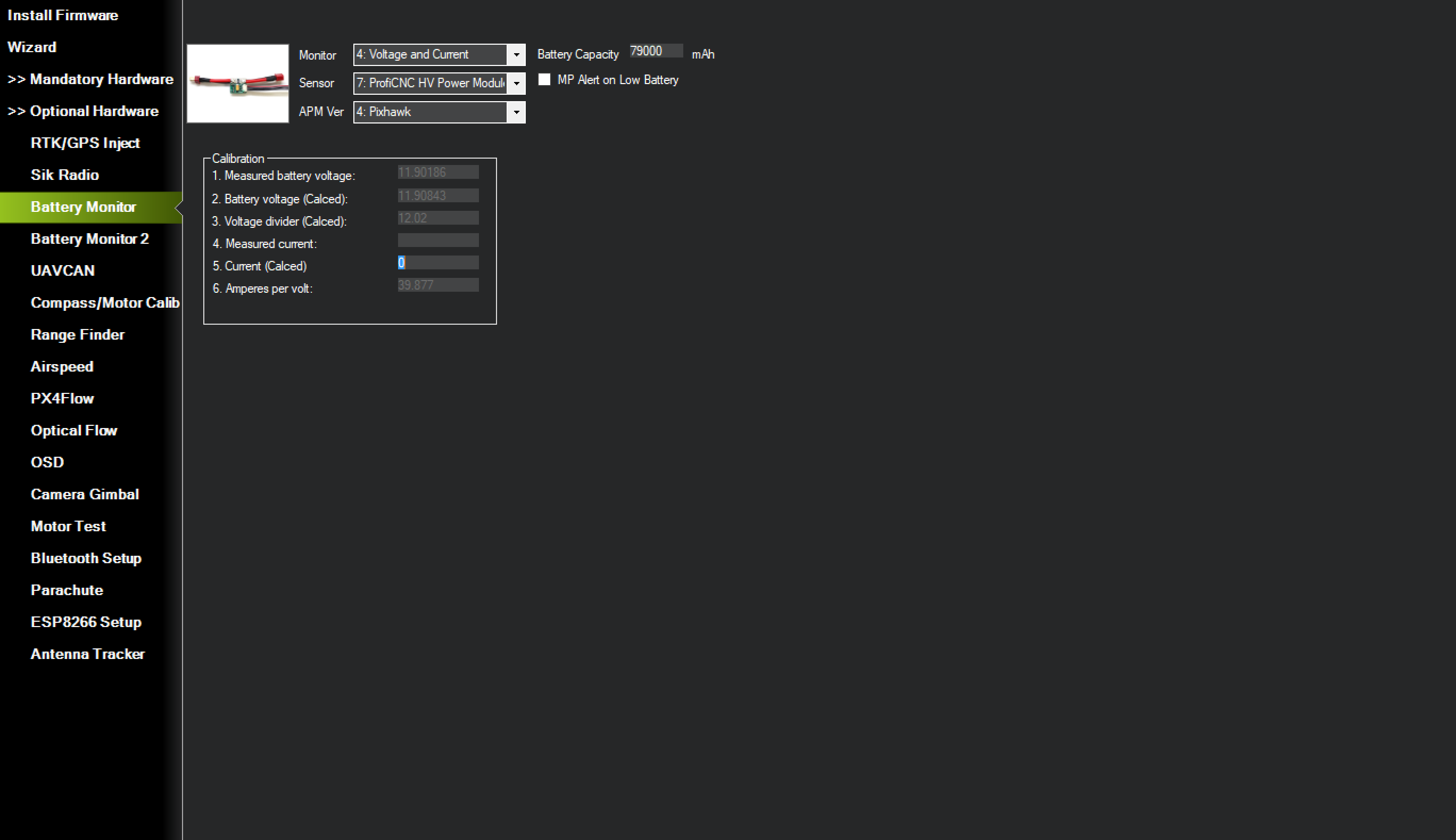
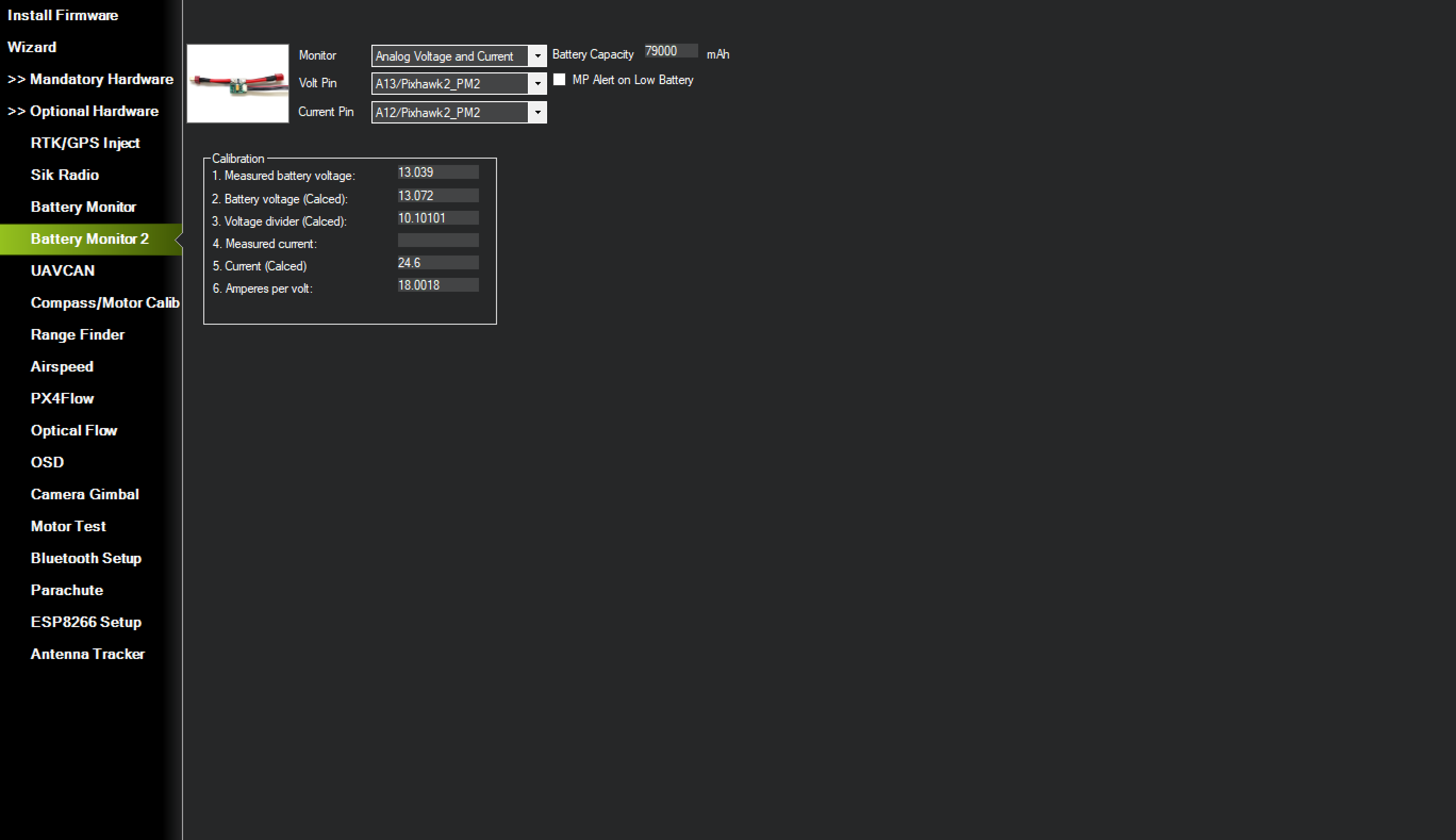
There is a video on the wiki for measuring current and calibrating your brick. Also, if you use the Mauch power module, you will get a very accurate reading. Additionally, I would suggest using the last beta version of Mission Planner
Good question: Volt is the measurement of battery voltage. VoltR is the “resting voltage estimate” which attempts to remove the voltage sag, by also incorporating information from the current and resistance measurements.
So when it removes the voltage sag it is not the real value? Where do I need that value for? When I want to calculate actual power consumption, I have to consider the voltage drop of the battery.
Here is my best guess, but it could be wrong:
I tend to quantify the remaining battery energy via the no-load voltage. (for a LiPo, 4.2V per cell is 100% and I think 3.5V per cell is “empty”. Note that some folks won’t run their LiPos lower than 3.7V per cell, others run even lower than 3.5V.) However, while the aircraft is flying and drawing current, of course the true voltage reading is much lower. Therefore, the VoltR value, if accurate, would let me estimate the remaining battery energy during flight on the scale to which I’m accustomed.
Someone please correct me if this is NOT why you’d want the VoltR value?
Sounds logical. So it is interesting for planes without current sensor. In other words with current sensor I can see what is the remaining capacity but without I do not know if it’s voltage drop because of high power or if the battery really is empty.