“Power exceeding maximum motor limit. Check maximum value.” A warning message is displayed.
A bit off but dangerous?
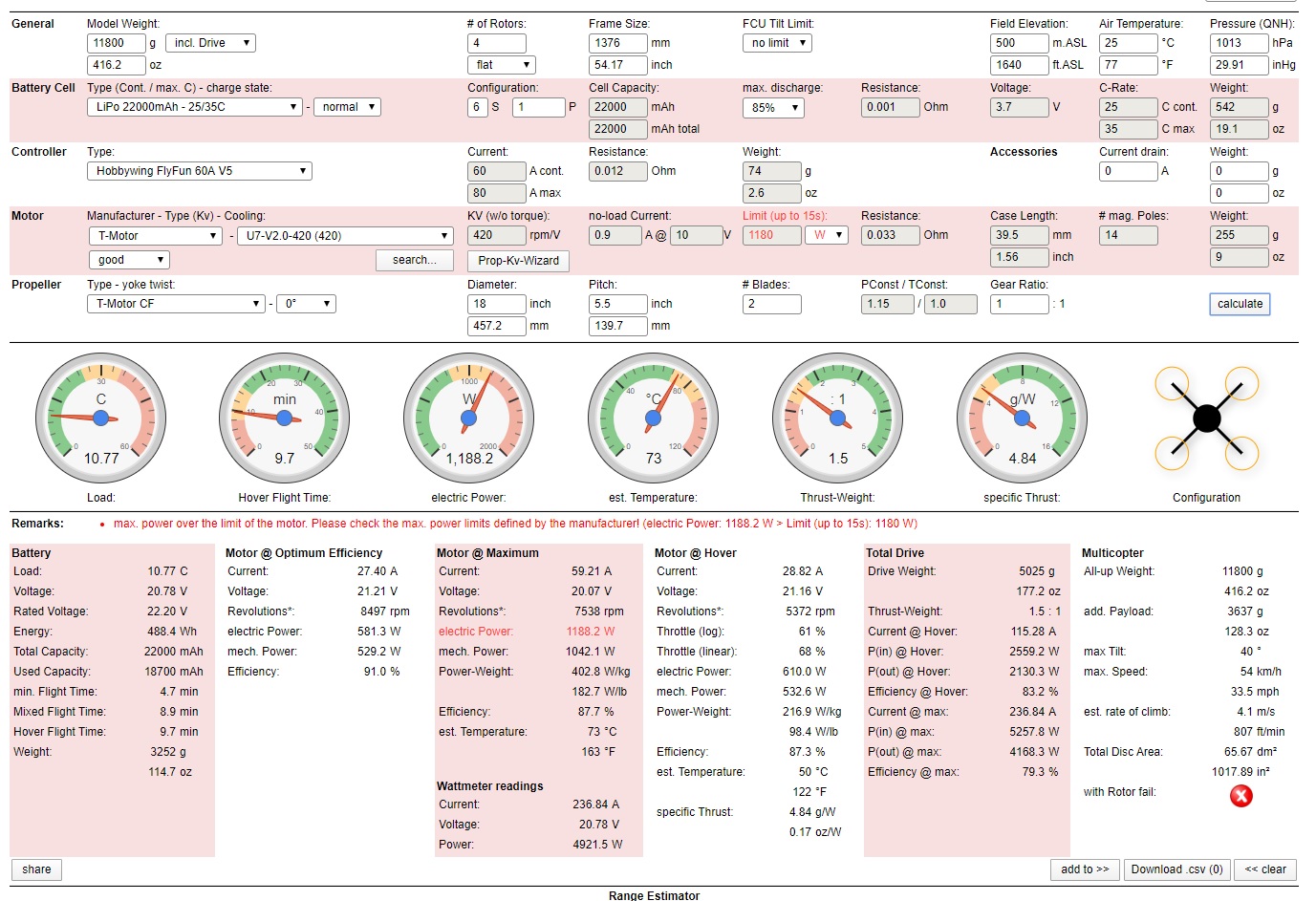
I would worry more about 68% linear throttle at hover.
Is it too dangerous?
No, it’s too heavy. You want hover throttle ~50%
The weight cannot be reduced because the gimbal and camera must be mounted.
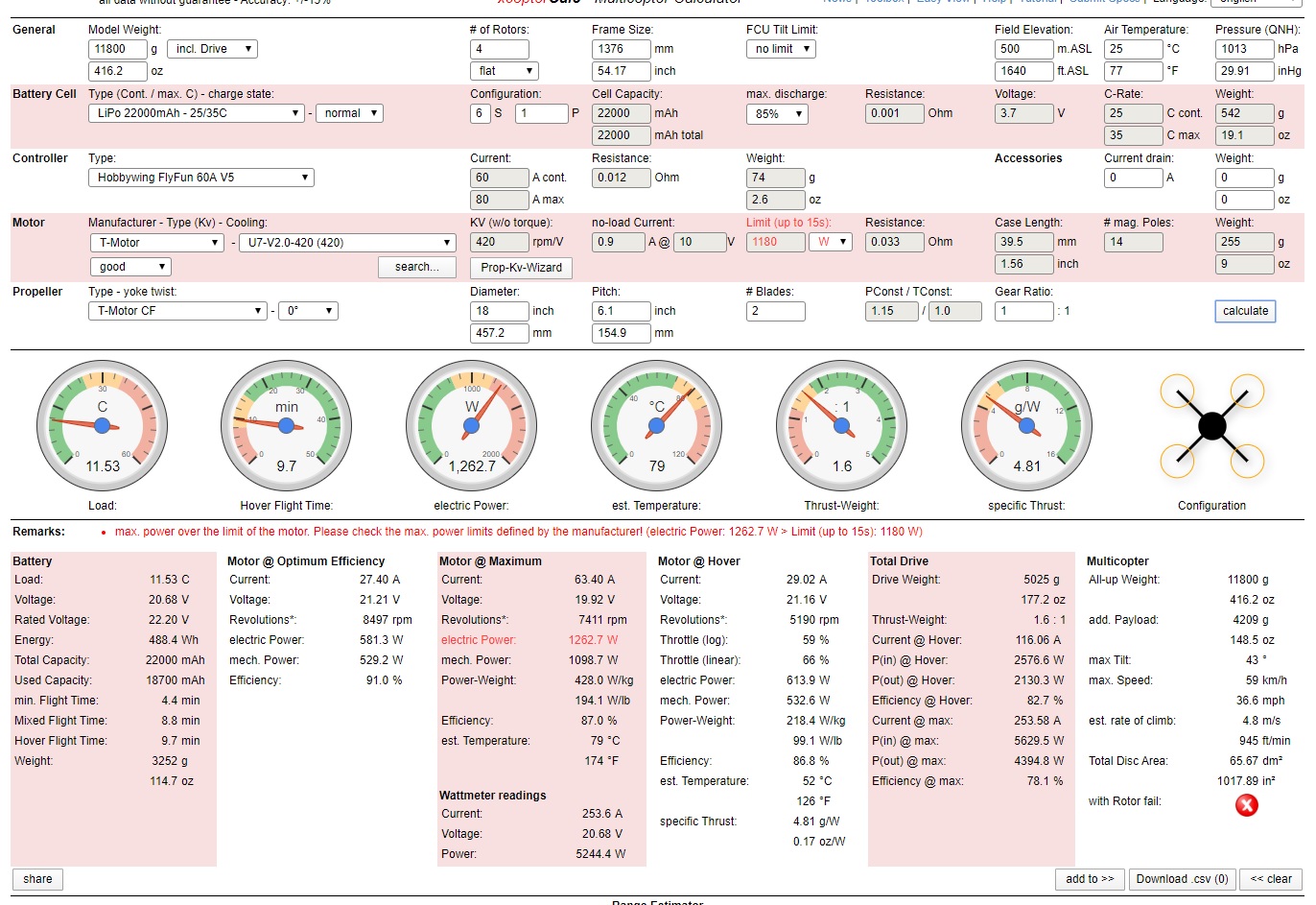
But by increasing the prop’s pitch, you can reduce it by 66%.
What’s wrong with using 68%?
I would like to use it if there is no big problem.
Quite underpowered for its size and weight. This is a 26lb aircraft, presumably carrying substantially valuable camera gear. Honestly the fact that you’re asking this question with these circumstances indicates to me that yes, this is dangerous.
You are right but I had a slightly different problem about it.
The power of the motor was better than I thought. But motors 3 and 4 got hot.(and Smoke from ESC)
Checking the logs, the 3 and 4 motors worked harder.
I’m still studying how to view the log so I can’t see anything else.
Can you guess what my hover throttle is and what’s wrong?
[https://www.dropbox.com/s/lknj5vd9oo2vgtr/2020-02-21%2017-28-52.bin?dl=0]
(https://www.dropbox.com/s/lknj5vd9oo2vgtr/2020-02-21%2017-28-52.bin?dl=0)
When using the automatic analysis function, the following message appears. What is NaNs?
Test: Motor Balance = WARN - Motor channel averages = [1297, 1296, 1390, 1400]
Average motor output = 1345
Difference between min and max motor averages = 104
Test: NaNs = FAIL - Found NaN in BAT.Curr
Found NaN in BAT.CurrTot
Found NaN in BAT.EnrgTot
Found NaN in CTUN.DSAlt