Hello guys,
I’m using a large quadcopter with 120kv motor and 30 inch prop with a payload of 10kg.
From last 1 year I had taken more than 500 flight hrs. It has a small issue that during mission it was loosing altitude even with terrain following radar. To solve this problem I tired to tune it again. After changing some parameters I saw little bit better flight than previous settings. All tuning was down without payload but when I started testing with payload its not able to fly properly and started showing Potential thrust lost(1) and copter loosing altitude suddenly.
I also tired to reset all its parameters to default settings but it’s still showing same issue.
I don’t think so as I’m using hobbywing x8 motor. As per manufacturer it’s a very tough motor. I’m also doing sedule maintenance after every 100hrs flight. Like motor cleaning and check-ups . If there is an issue why it’s flying good without payload. Issue happening only with payload!!!
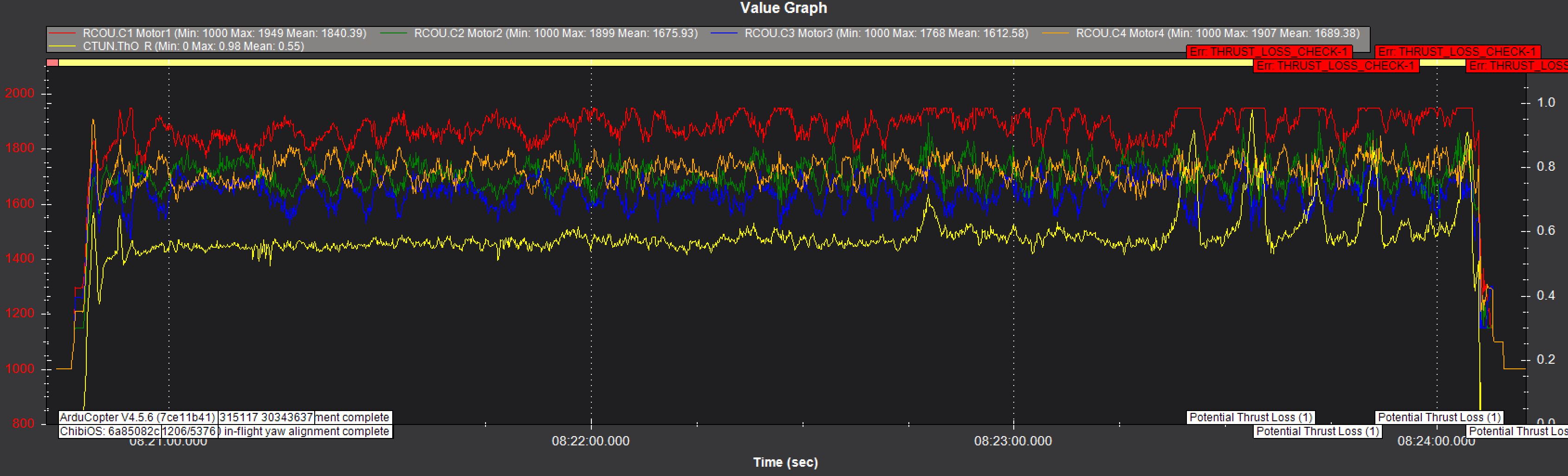
Is this what your RC outputs always looked like? If so these Motors and/or ESC’s were being overworked. This shows a low thrust/weight with one motor bouncing off of max hence the thrust loss error message.
If you had shared that when you built that craft I would have said the low thrust/weight needs to be addressed before advancing. It’s too heavy. Review some old log files and compare.
One thing apparent from the graph is that motor 1 is always being driven harder than the rest. One thing you may consider is swapping motor 1 with the motor diagonal to it and test again to see if the problem moves with the motor location or stays with the ESC location. That could give you a bit more info as to determining if it’s a motor problem or perhaps an ESC problem. An overheating ESC may be throttling itself back.
Truman has a good troubleshooting step for you, but this thing is large and underpowered, meaning likely dangerous. At a minimum, you need a more aggressive prop. But I think you most likely need a new, adequately sized motor/prop combo and an ESC rated to drive it.
As an alternative, use the recommended battery and reduce weight there. You might be surprised at the flight time by comparison, since you don’t have to haul the extra weight.
I’ve been pondering this a bit more and I definitely agree with the others that the data in the graph indicates this quad is under powered. However looking at the Hobbywing X8 specs it looks like your system should have no problems with the weight you are trying to carry. The data on the Hobbywing page indicates you should be around 2/3 or 66% throttle for normal flight with a takeoff load around 27kg, but your pulse width data indicates motor 1 mean (average) of about 95%, motors 2, and 4 in the upper 80s % and motor 3, which I assume is opposite or diagonal to motor 1 in the lower to mid 80s %. The imbalance across the motors would indicate to me that the center of gravity, at least with payload, is closer to motor 1 instead of in the center. Don’t know if you could fix that easily but it would definitely help. This of course assumes there are no problems with the motors or ESCs themselves. As for total power I am beginning to suspect you may have a battery or power delivery issue. If you have a way to monitor or log battery voltage at the ESCs that would be worth looking at. Amps drawn by each ESC would also be helpful. Using 12s batteries increases the odds of a poor or degrading internal connection or even a cell that’s not quite getting the job done. As battery voltage drops more throttle must be applied to compensate. And your data shows the controller having to use near full throttle. It is certainly possible for a battery issue to only show up under heavy load which is why I suggest monitoring or logging in flight. Sitting on the bench with no current flow, everything could, and very likely would look just fine. Also recognize the site say the X8 can provide up to 15.3kg thrust but the max takeoff load should be 5-7kg, a max of 28kg for a four motor drone. One more thing to consider is that they say these numbers are at sea level. They would all be lower as you go to higher altitudes.
Hello everyone,
Yesterday I took a flight changing motor diagonally means motor 1 now position of motor 2.
Now QGC showing potential thrust loss(2). Definitely that motor has some issue.