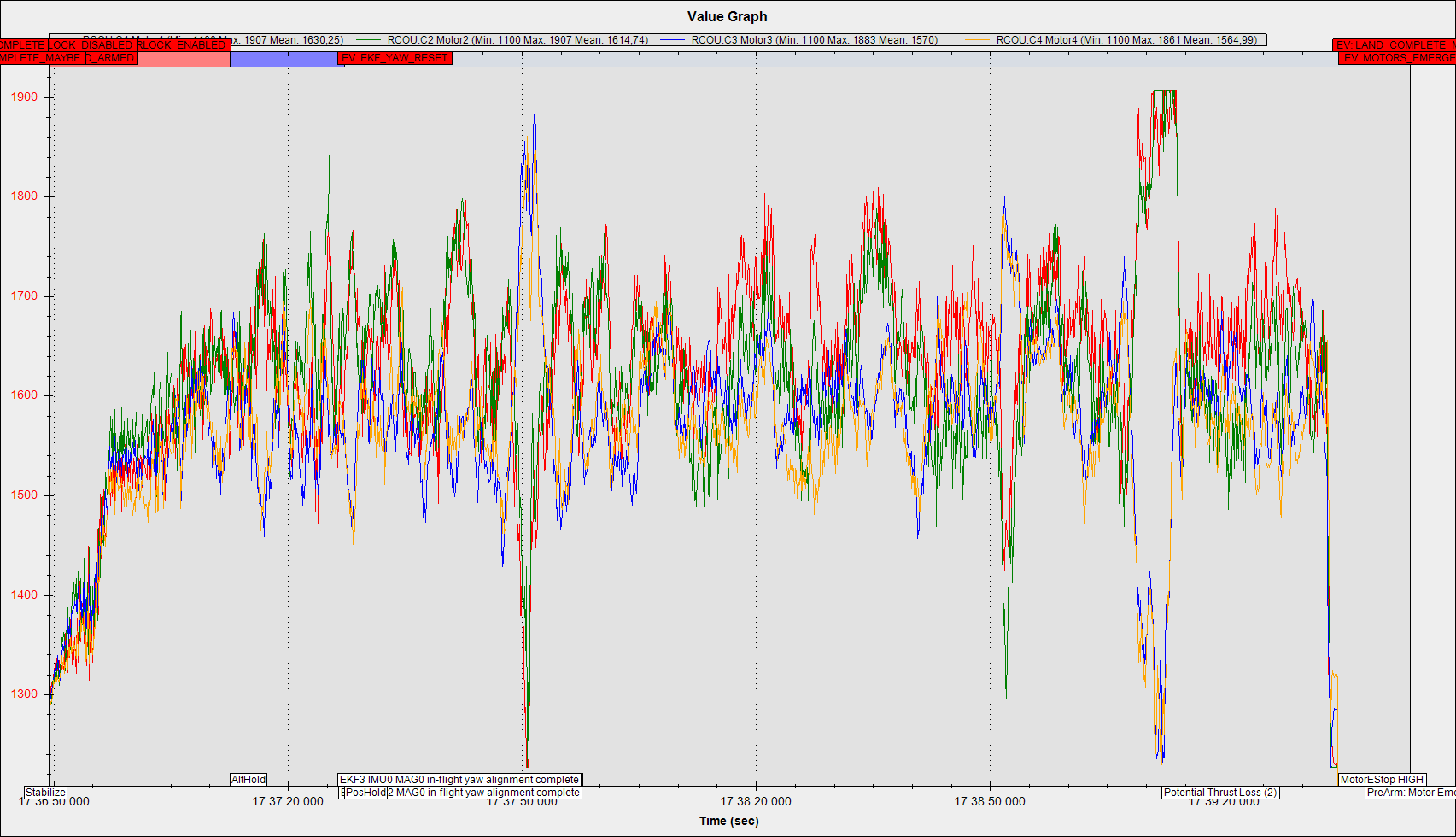
When my drone descending I have overload on two motors (diagonal). Once on one diagonal, and another time on the other. Can you help me?