I have quad 4,5kg.
props t-motor MF1604.
motors: t-motor Antigravity MN4006 KV380.
Sometimes i have Potential Thrust Loss. Can you help me and tell why it is happen?
Link for log: 2023-06-06 10-27-22.bin - Google Drive
I have quad 4,5kg.
props t-motor MF1604.
motors: t-motor Antigravity MN4006 KV380.
Sometimes i have Potential Thrust Loss. Can you help me and tell why it is happen?
Link for log: 2023-06-06 10-27-22.bin - Google Drive
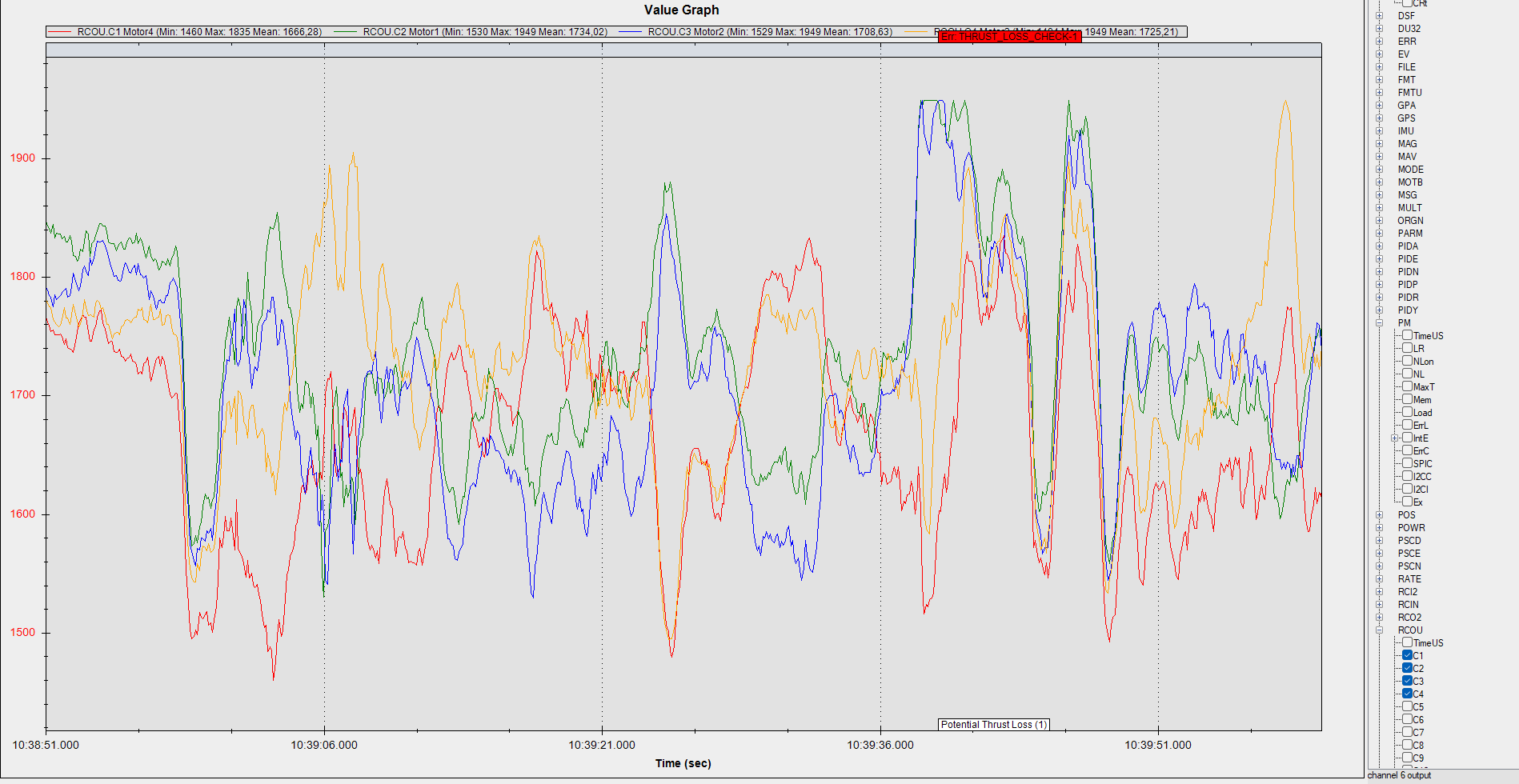
the potential thrust loss warning occurs when a motor is saturated for a few seconds. should be fine if you only saturate occasionally for a few seconds.
however, if the beginning of your plot is hover, then it seems your T/W is much less than 2. ardupilot currently has a bug where altitude will be sacrificed for attitude when T/W < 2 and attitude outputs are high. this bug is documented here: AP_MotorsMatrix: prevent altitude loss when thrust-to-weight is less than 2 by 117-MasterChief · Pull Request #23512 · ArduPilot/ardupilot · GitHub
this means the copter can suddenly drop. you can either increase T/W > 2 or modify the code.
Please stop spreading this behavior as a bug - it is just a control scheme that you do not agree with.
This craft is a bit overweight/underpowered to start with (~1650-1700µs average at hover motor output) and then a control demand maxed out some outputs. You are not the 1st to report this with those motors so regardless of what T-Motor says they should do IMO you need a higher thrust/weight to provide more overhead.
Poor tuning isn’t helping either.
not trying to argue here, but i do believe it is a bug. especially since the existence of this behavior was denied when i first brought it up, until i proved it occurs in SITL. also, its not what any user would expect. i would submit that an aircraft is supposed to stay in the air, and suddenly dropping directly counters the basic function.
am i not allowed to have this opinion?
instead of calling it a bug, how about a “Previously Unknown and Unintentional Code Path with Deleterious Effects”? ![]()
If it is a bug there is an easy fix for it ![]()
Had to laugh when I saw this. It’s like removing the check engine light bulb from the dash of your car.
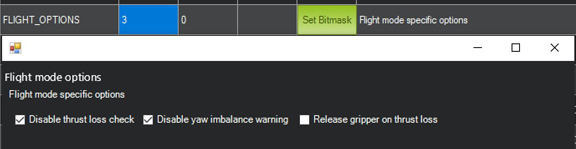
I think my quote (and what @manavgandhi17 is talking about) is not related to your pic, but I agree that is funny. You can just turn off the thrust loss check warnings… wonder if it affects behavior. Speculating: it might disable thrust loss compensation behavior, but for quads that would be moot.