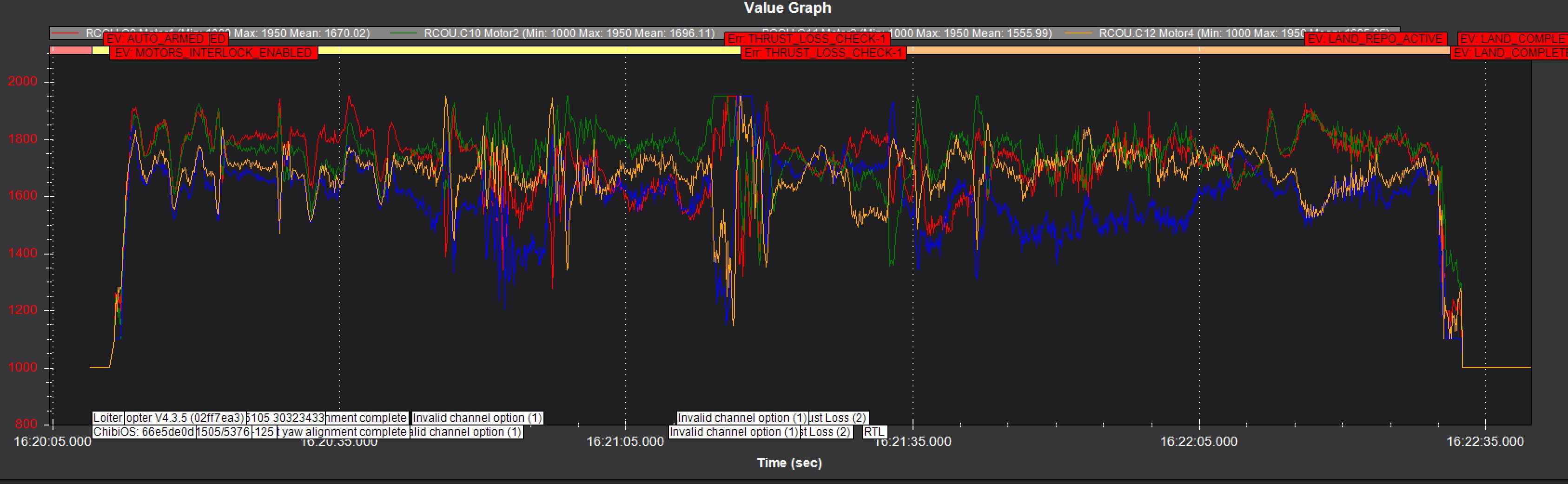
I wanted to post a log that I just extracted from a vehicle. We are seeing a potential thrust loss error in flight. We are running APD 80fx dshot esc’s and kde6213xf-185 motors and 24.5*8.1" props along with a 25000 lihv battery. The all up weight of 9.1kg seems to be well within the range of the motor prop combo. I’m seemingly missing something…Any input would be appreciated.
Under a Yaw demand the outputs are maxed out and the average Motor outputs of ~1700us at Hover is way too high. eCalc says 68% hover throttle for the setup about what is being seen.
Also, the Notch Filter is doing nothing as configured.
Out of curiosity, what’s the idea behind passthru on all the outputs not assigned to motors?
And some of the RCx_OPTIONS have an invalid assignment. There are error messages for that.
After fixing these issues I would suggest setting Auto Tune agression back to default before continuing. I guess you tried it on Roll.
I did see that I had pwm set to 1000-2000. I made the change to 1100-1900. The escs are on autodetect but I did see improvements. I also notices the parameter “servo_ftw_poles”. I set it to match “servo_blh_poles”. Lastly I reduced yaw accel down to 9000. All of these changes yeilded improvements. I made it 10 minutes before seeing the thrust loss error. Below is a link to a new log with the changes mentioned above.
None of those changes would effect the fundemental problem of thrust/weight. And you should never see a thrust loss error. Well, unless you kill the battery perhaps.