So it’s probably because of a low battery percentage?
How do I find out if the cause of the message is the battery issue?
If it’s of any help, here are links to my logs:
https://drive.google.com/file/d/1UfObcGgo_SBvcQpymAGNDJA9Ia9LxtTh/view?usp=sharing
https://drive.google.com/file/d/1kFf0s9vYLCxSlvew0Hp6JlknXkS_BkmI/view?usp=sharing
https://drive.google.com/file/d/1fW9mTJt0cet5E0E5FrlvQqcy0D8QDLQ4/view?usp=sharing
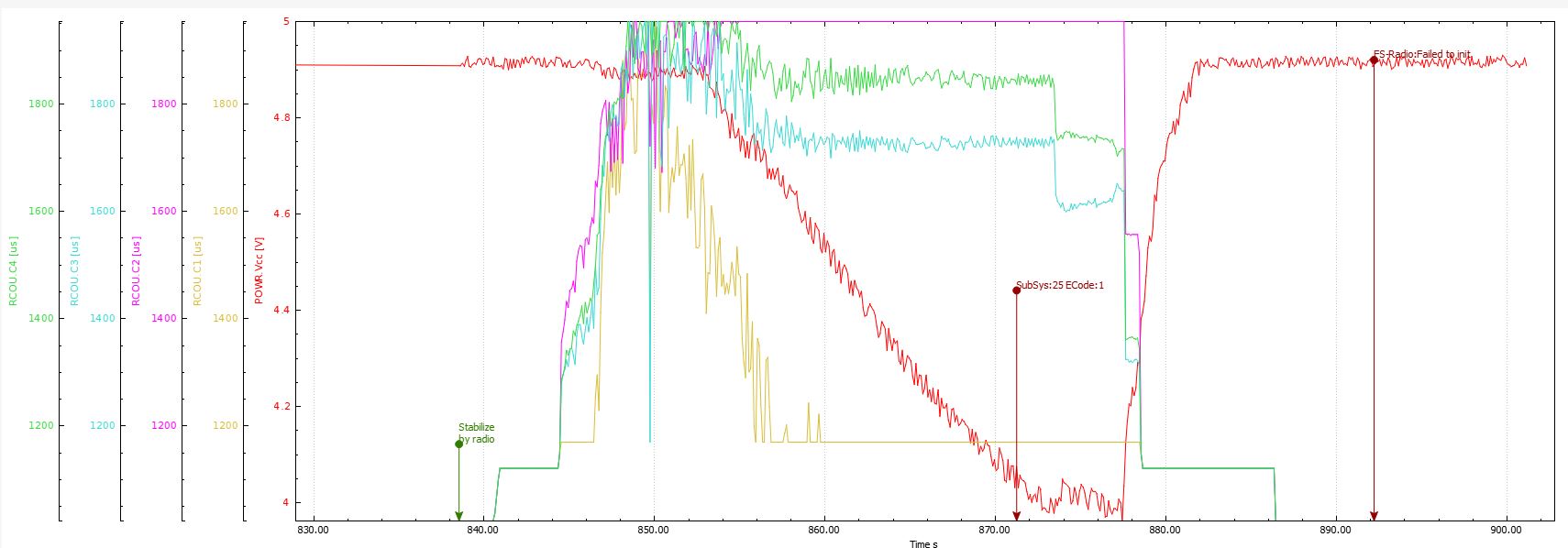
Your motors are commanded to max and it doesn’t look like it’s leaving the ground. You don’t have Battery logging on but it’s more likely it’s under powered / over weight.
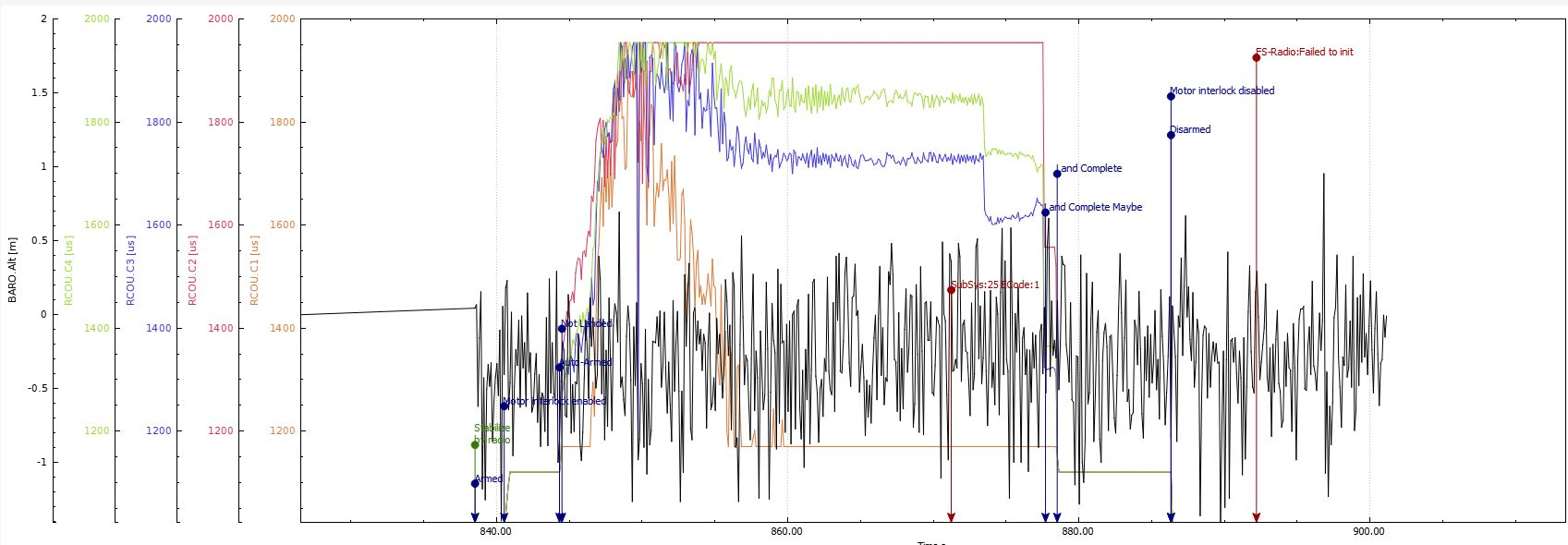
Provide a log of it actually hovering.
Perhaps it is a power problem. Your boards Vcc drops well below brownout voltage under current demand form the motors. Better get some Battery Logging going.
@dkemxr clearly explained why the message is not simply “low batery” but “potential thrust loss”.
The problem is not only the battery, but your thrust to weight ratio.
We need a complete parts break down including battery weight and the drones Take Off Weight (TOW), but my primary suspicion is the aircraft is over weight and under powered…
You logs do not have any battery data which means you are not using a battery monitor. This ONE device is the most useful and important part of the system. With out it you lose low battery fail safe, and you have no way of calculating motor/prop efficiency.
Install a power monitor…
It is also obvious the aircraft is severely under powered and over weight.
Give us a complete and detailed parts list including battery type, voltage, current capacity and weight. Also give us the aircraft weight WITHOUT the battery so we can figure out what is actually happening.
Here’s the list of parts used for my drone build:
Flight controller: Pixhawk 2.4.8
Motors: four 2213-935kv motors
Props: 1045
ESC: four 30A ESCs
GPS
PPM Encoders
Reciever
Telemetry module
5200mAh 11.1v 50C 57.72Wh LiPo battery
That is a good start, but you left out the SECOND most important piece of the puzzle: HOW MUCH DOES THE AIRCRAFT WEIGH WITH THE BATTERY INSTALLED?
Here is why I need this information.
I believe you are experiencing thrust loss errors because the power system (motors, battery, and props) is not matched to the take off weight of the aircraft. The result is the aircraft is under powered.
To verify this I need the aircraft take off weight, total current draw during a hover, and battery voltage during a hover. Using this data I can calculate how much power in watts is being consumed and then I can calculate how efficient the power system is with regards to how many watts of power are consumed per gram of thrust generated.
With out that data you are on your own…
I’m sorry but unfortunately I’m in a remote area and a means of measuring the weight of an object is inaccessible to me. However, the drone flew perfectly fine after I had just completed the build
If it helps, here’s a link to a picture of the quadcopter
https://drive.google.com/file/d/19SZhBjv87-zpezaKLpczfo2hMVg_1ssU/view?usp=sharing
I just measured the weight of my copter. Turns out it’s 1.3 kg
hey,
i am also facing the same problem with my quad copter
it is showing potential thrust loss in auto flight but working fine in any other mode.
i have reduced the weight and i have taken the successful flights on this config but showing this error since i have switched from PX4 to ardupilot. again drone is woring properly in any other modes like poshold althold stablized.
What you probably mean here is: “drone is working on the edge of stability in any other modes like poshold, althold. stablized, and so far I did not noticed it” .
But ArduCopter does not like to be on the edge, it likes to have some headroom, so that when there is a wind gulp it will not loose stability, and so that it can comply with you commands ASAP.
Loose more weight, change the props or tune it a bit better and the “problem” will fit itself.
i tried this but problem is still there
drone is functioning OK in any other mode but in mission planning it is showing thrust loss
Try harder. Loose more weight.
with same weight drone is working fine in PX4 but in ardupilot it is giving problems.
If PX4 does not test for thrust problems, it can not, and will not give you warnings. That is then a missing feature of PX4.
ArduPilot tests for thrust problems and warns you about it. That is safety feature.
Just ignoring a problem does not make it go away, does it?
Do you still think that the problem is ArduPilot?
1 Like
i dont know the problem what is the problem here but if PX4 does’nt warn about thrust loss i think then drone should behave same if the problem same?
The problem is that if PX4 does not look for a lack of thrust you will not find a lack of thrust.
ArduPilot sees the problem and takes action to protect your vehicle.
Are you comparing apples to apples? Have you configured ArduPilot correctly?
1 Like