Hi, I am using ArduCopter V4.2.2 and a hexacopter with the following configuration:
F550 frame with A2212 1000KV 13T Brushless Outrunner Motors, 30A Brushless ESCs, 2 x 3S 3300 mAh in parallel, and 1045 Plastic Propellers. Total weight of the craft (all inclusive) is 2.1 kg.
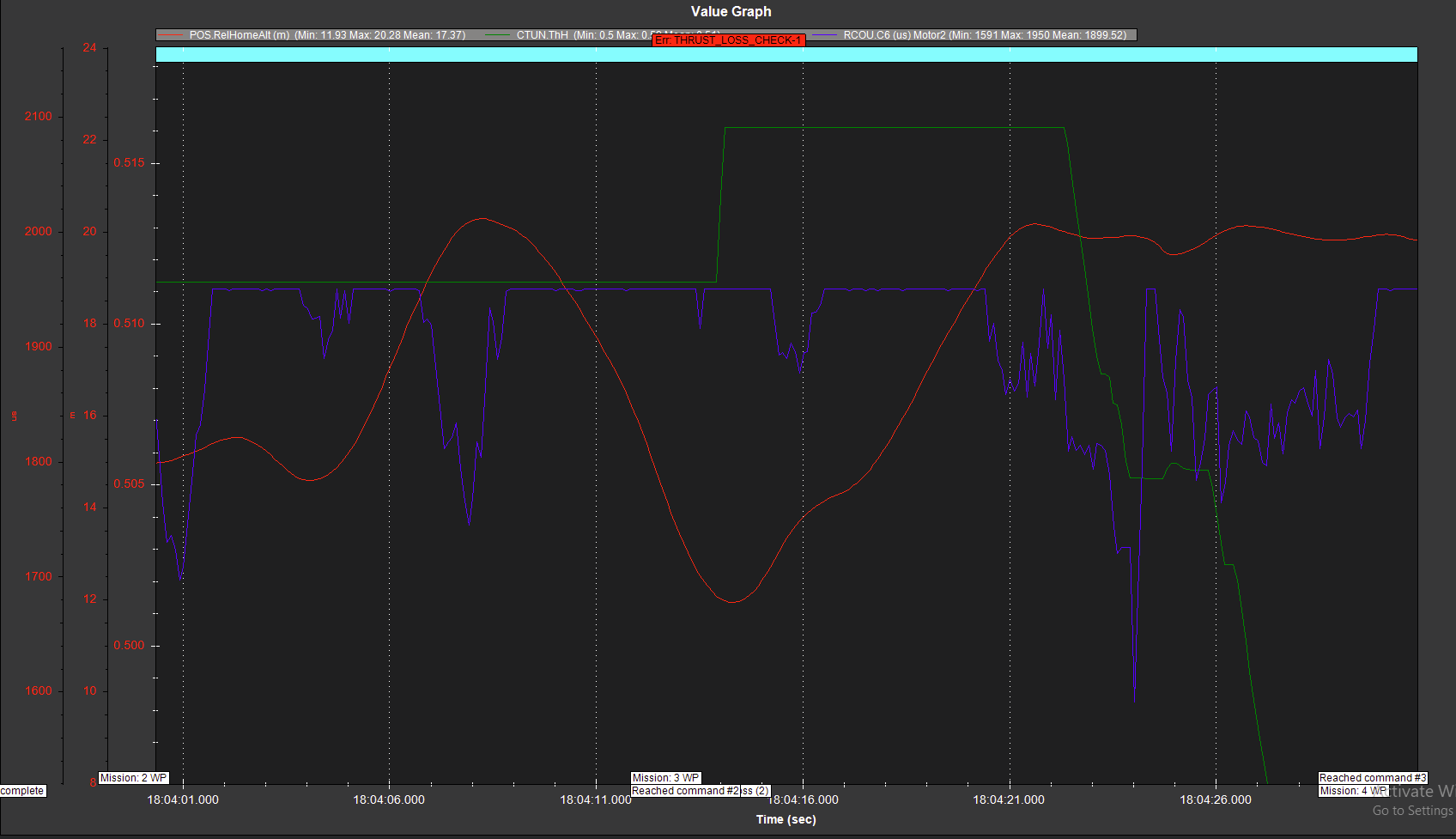
While I was doing a waypoint mission, the aircraft suddenly decreased in altitude and then I received “Potential Thrust Loss (2)” error. The aircraft managed to recover and continued its waypoint which then started to lose thrust again and then downed. I attached a screenshot of the graph plotted below which shows the altitude in “Red”, Throttle Hover in “Green”, and Motor 2 PWM output in “Blue”. One can see that Motor 2 output kept maxing out several times while the Throttle Hover was around 52%.
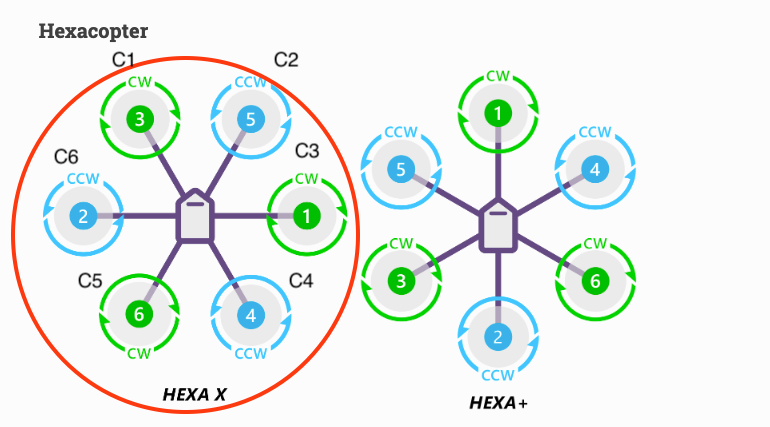
This is when the Thrust Loss error occurred. You have a non standard motor order so you can figure out which of these 3 outputs are commanded higher than the other 3. Tuning is poor also but no surprise as it doesn’t look like you have set the Initial Parameters, configured the Notch filter or completed any additional tuning.
When you say “it has an output bias”, do you mean that the right side of the copter M5, 1 and 4 produce more propulsion than the left side which causes the left props to spin harder and hence M2 maxes out and then loses thrust?
The copter hasn’t yet been fully tuned and Notch filtered but it has the Initial Parameters set as per the ArduCopter Wiki.
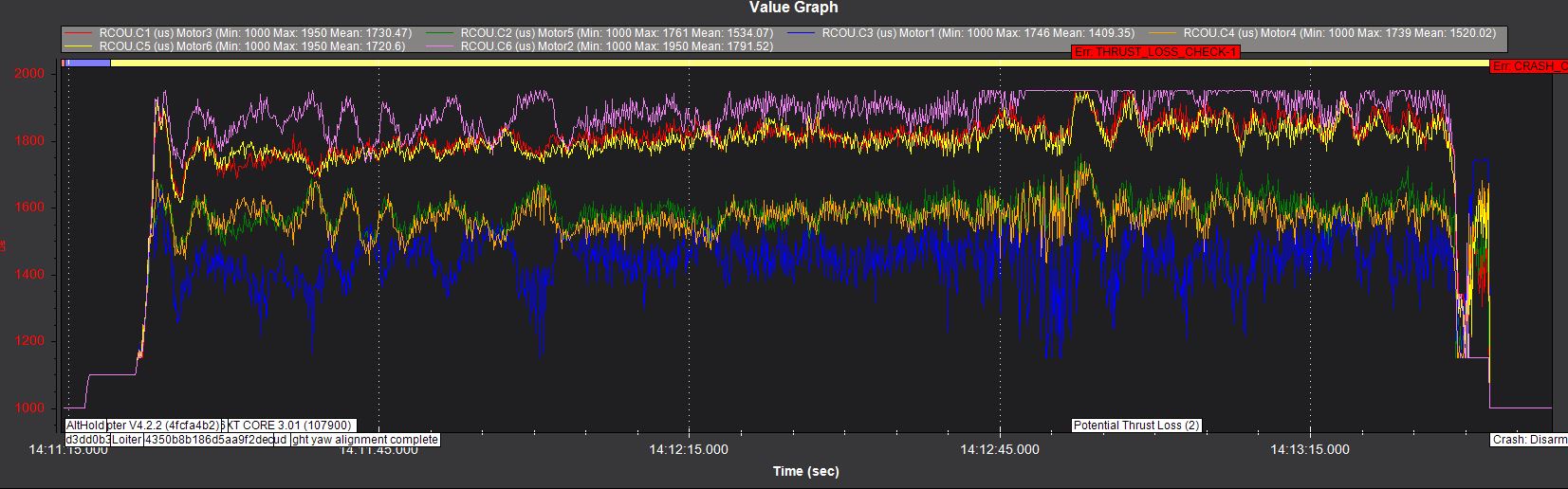
As you can see outputs 1,5&6 are commanded higher than 2,3&4. So I suppose with your motor order the craft is not well balanced left to right. If you look at the average output of all 6 motors it looks to be ~1700us. With the proper thrust/weight it would be ~1500us.
The Initial Parameter Setup is for pre-flight. That’s why it’s located under Mandatory Hardware…
It turned out that the problem was with esc-to-motor connection of M2 that seemed to be half broken. I fixed it and the aircraft worked without any Thrust Issues.