Customers of mine almost had a flyaway on April 11th according to noaa.gov GPS disturbances were to be expected on that day. I couldn’t find anything conspicuous in the log files. Maybe someone can take a look and verify my guess (Impact)? The first flight was ok, they let the Copter climb up to 200m and then landed again. On the ground the Copter didn’t disarm and pilots took off again, then the disaster took its course, the Copter climbed up and flew away, but luckily came back again. Thank you very much!
FW is 3.6.7 RC1 with a modified Motor Mixer for Hexa H
Thanks Mike! I don’t quite understand. With a Fly Away I should have a “wrong” trajectory in the KML file. However, it corresponds approximately with the observation of the pilots. And according to them, the copter didn’t react any more to control inputs… mysterious
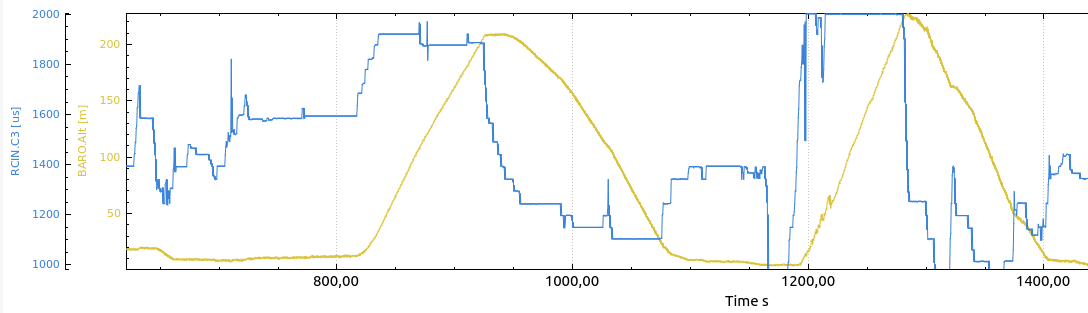
The second flight also has more pitch/roll commands from the pilot, but nothing very unusual.
And if did seem to deviate from desired position, why did the pilot not change to stabilize or althold ?
Could you get the pilot to describe what exactly he was unexpected ? What he thought was happening, acted on and the choices that was made? (especially; if you think the AP navigates incorrectly, why not take over ?)
Thank you Andre! The pilots say the Copter acted completely independently and didn’t react to stick inputs. But I can’t see any RC Falesafe. Why the pilots did not switch to Stabilize or Althold is also not clear to me…