Mike,
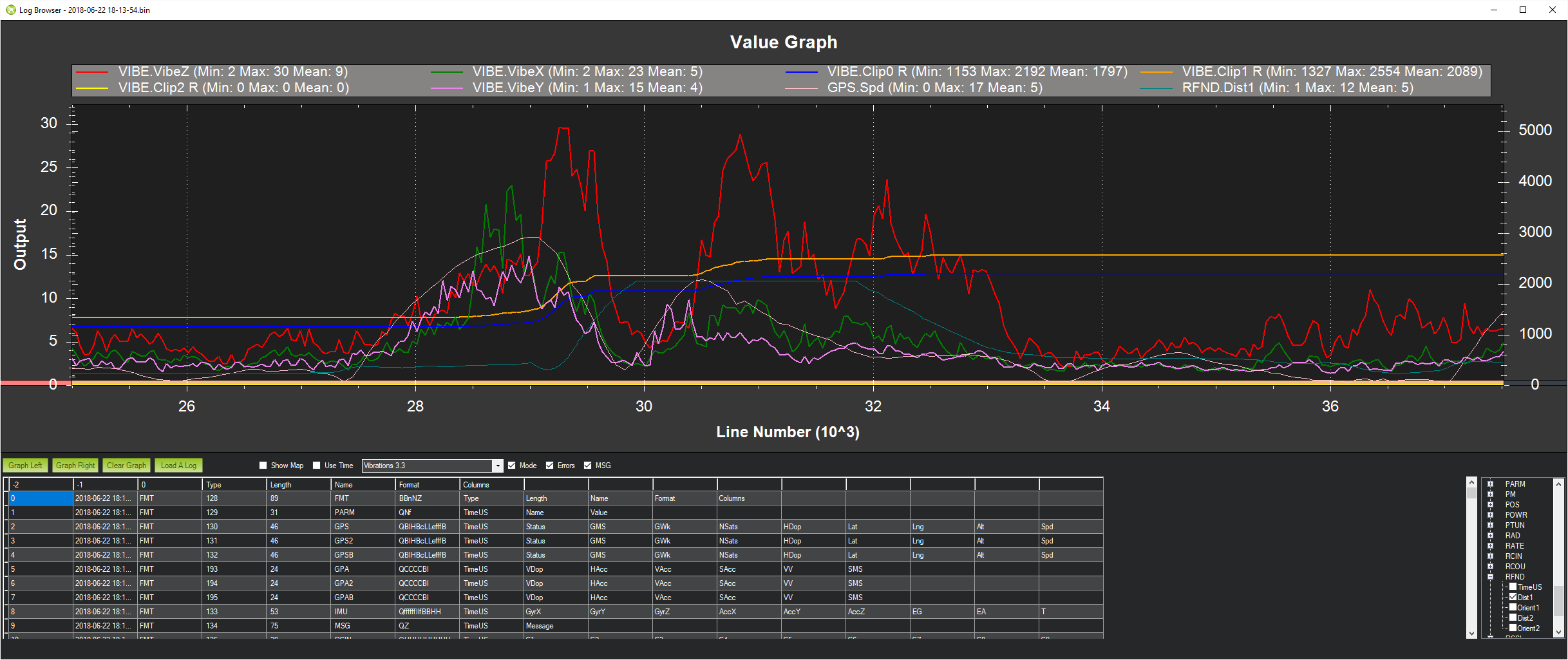
it is really difficult for me to understand this. I look at this chart - and in the sample here it took this model to go almost over whole football field to pick up enough speed to get this effect - at the mark 29 on this graph it picks up max speed, and then i give it full brake. GPS.Spd shows how it stops, at same time VIBE.VibeZ goes all way up. But before all that at mark 26 it shows normal loiter - on new props and new mounts all vibes are under mark 7 - as good as i can get it. What i do not get at all - vibeZ goes up at braking, understood, but, model starts climbing altitude even before VibeZ maxes out and clips out at value 30 - what drives this behavior? it begins at value 25 about time mark 29 1/3. It looks to be something specific for position hold logic, as i tortured this model in acro and stab mode to push it way harder and it was able to fly fine maxing out current on ESCs, with no such weird issues. Of course vibs do get higher as model pick up speed, there is nothing to do with that, but why it results in such a response as to give extra throttle and climb up?
I tried to play with filter values on gyro and accel, and ended up back with gyro to be at 80 and accel at 40 - it seems to show least amount of weirdness, but, it is still looking odd to me.
i admit i never had a chance to tune such racer small fast models, it seems to be very different from 800kv or 315kv heavier slow drones. i am trying to understand if there are any parameters that may affect this scenario and what factors contribute to this issue. it was a challenge even to get it into the air, thanks to Leonard who actually gave some advice here:
otherwise it would not even fly at all.
I do not expect arducopter to be a betaflight - but i can see how in stab and acro modes it is working acceptably fine, as i pushed this model to max current there and it responded decently enough, so this altitude jerk in pos hold has to be something caused by some code logic related to some parameters or filters, perhaps? vibes will raise with speed, it is a given. is there anything that can be done here or only solution would be to lower max speed for pos hold to tame it down and avoid those issues by reducing max speed?
logs here
https://drive.google.com/file/d/18NyTXkU9CshD1rxxq4dYhgBmhCLse22d/view?usp=sharing