Hi, I’m trying to understand and tune the PSC PIDs and to me it seems that position I is missing.
Moreover there are some inconsistencies between horizontal and vertical terms (but all the terms seems covered thanks to explanation by @iampete)
Current terms are:
POSXY P
POSZ P
VELXY PID
VELZ P
ACCXY –
ACCZ PID
So we already have terms doing same thing (POSXY P = VELXY I and VELZ P = ACCZ I). But we’re missing position I (both horizontal and vertical), right?
If I understand it well, vertical velocity terms not missing as VELZ I = POSZ P and VELZ D = ACCZ P.
Default values are:
| P | I | D | |
|---|---|---|---|
| POSXY | 1 | – | – |
| POSZ | 1 | – | – |
| VELXY | 2 | 1 | 0.5 |
| VELZ | 5 | – | – |
| ACCXY | – | – | – |
| ACCZ | 0.5 | 1 | 0 |
Is it correct to have duplicate terms? Maybe one has to be set to zero?
E.G. is this a consistent setup both on XY and Z?
| P | I | D | |
|---|---|---|---|
| POSXY | 1 | – | – |
| POSZ | 1 | – | – |
| VELXY | 2 | 0 | 0.5 |
| VELZ | 2 | – | – |
| ACCZ | 0.5 | 0 | 0 |
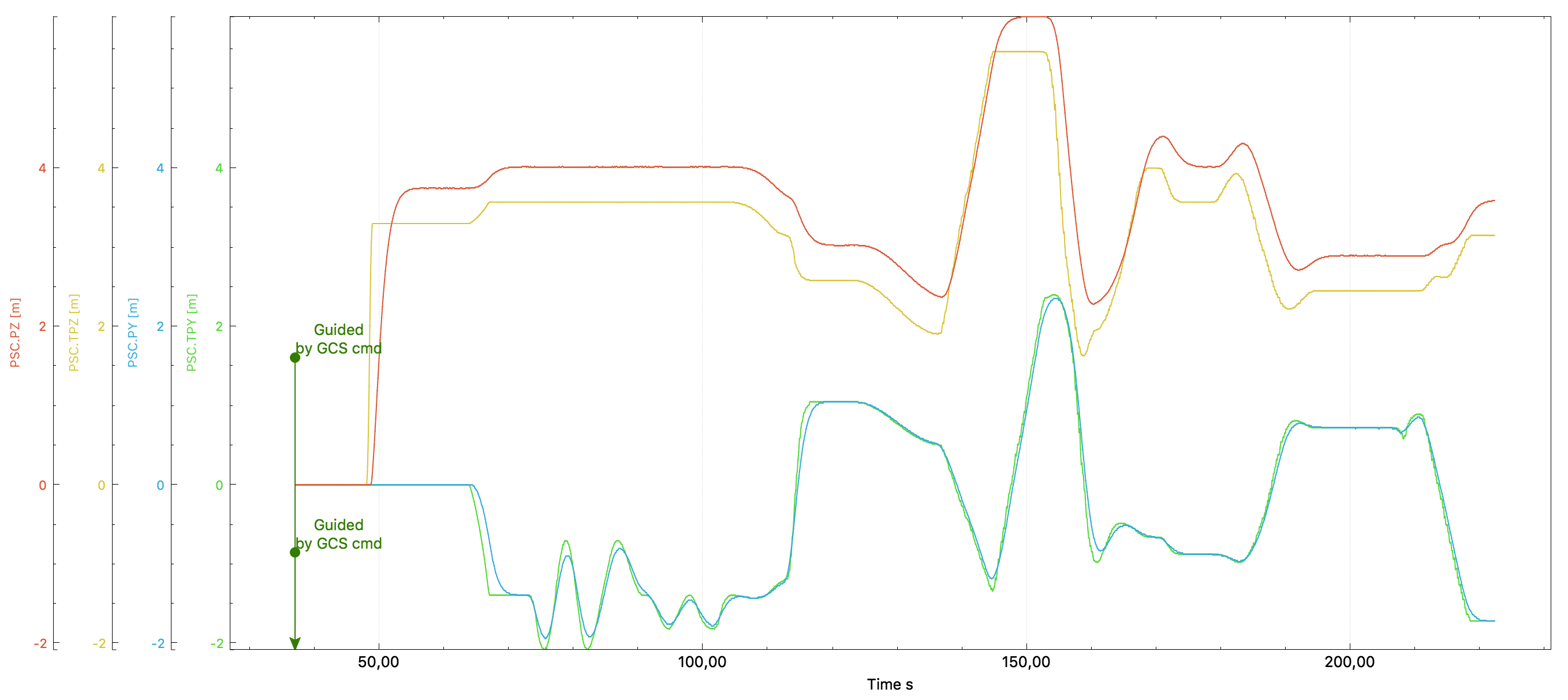
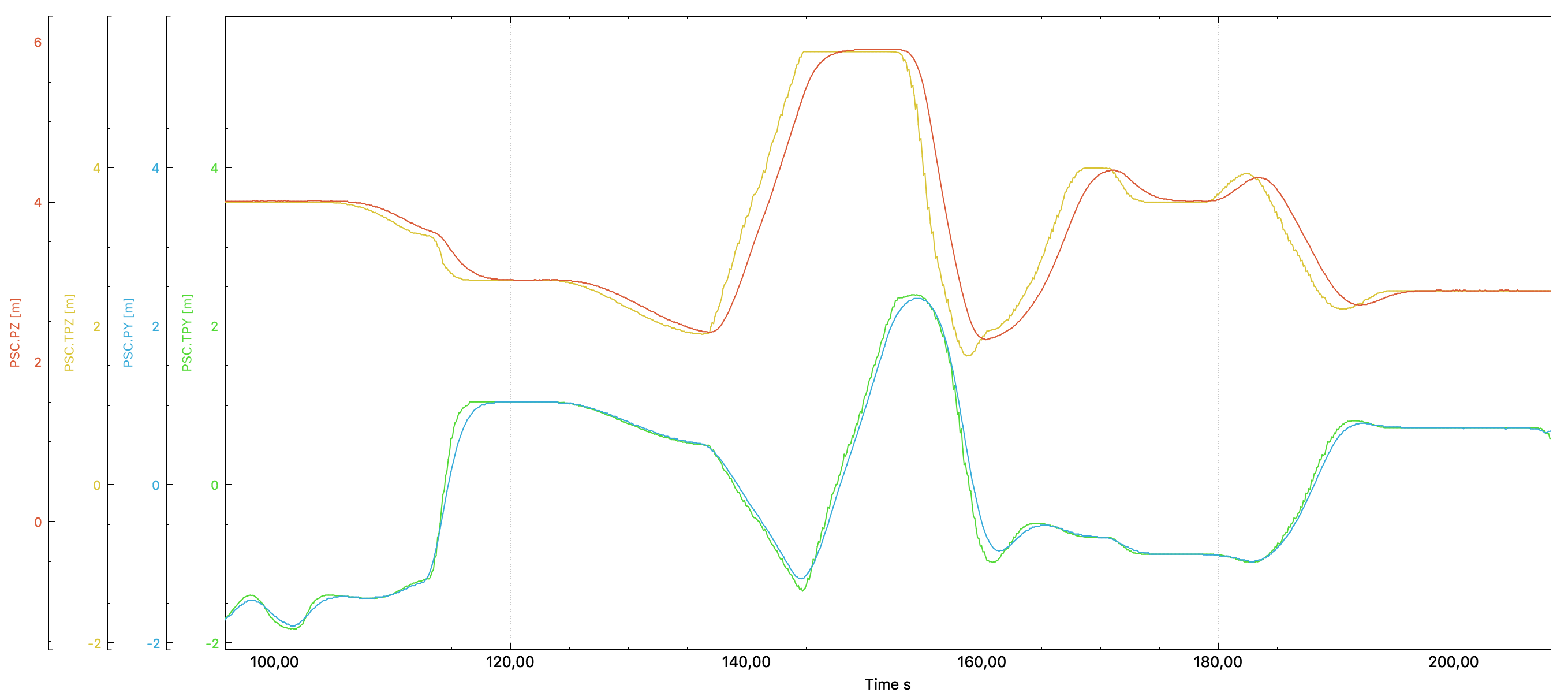
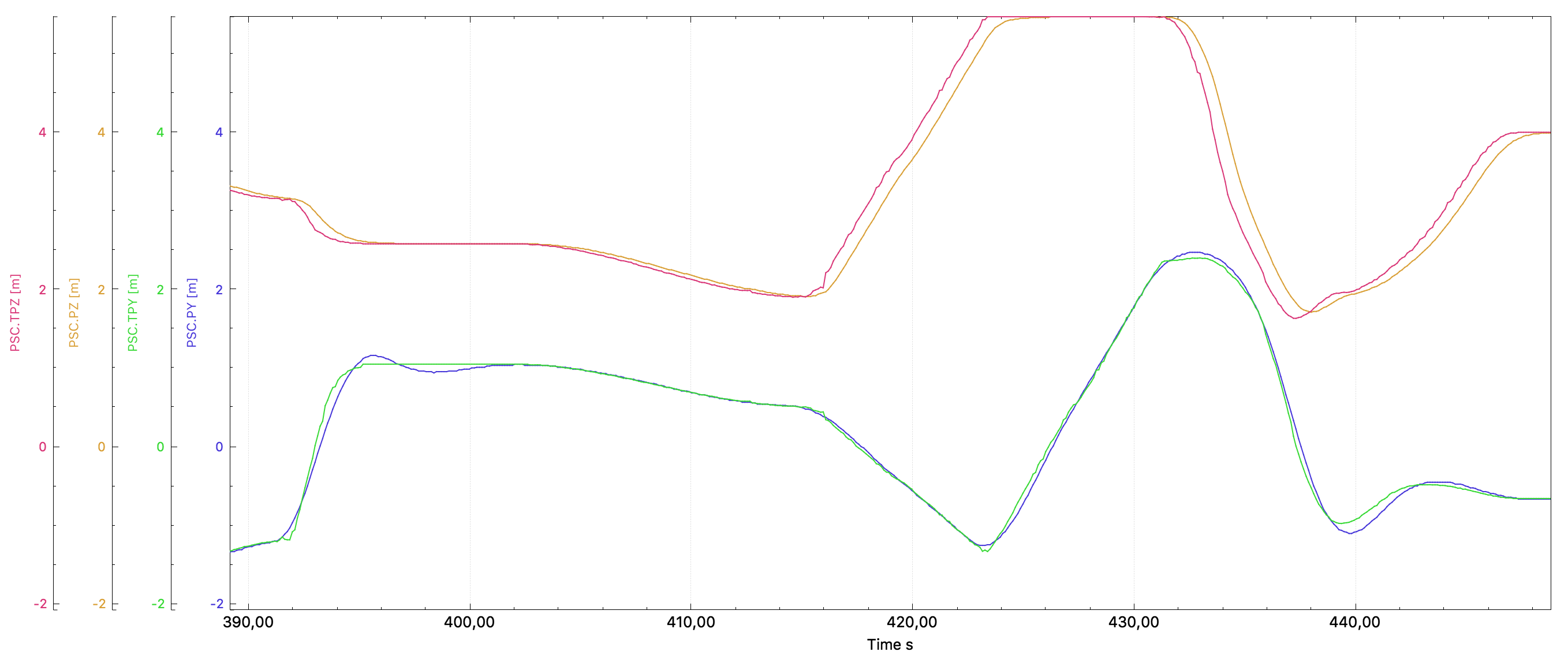
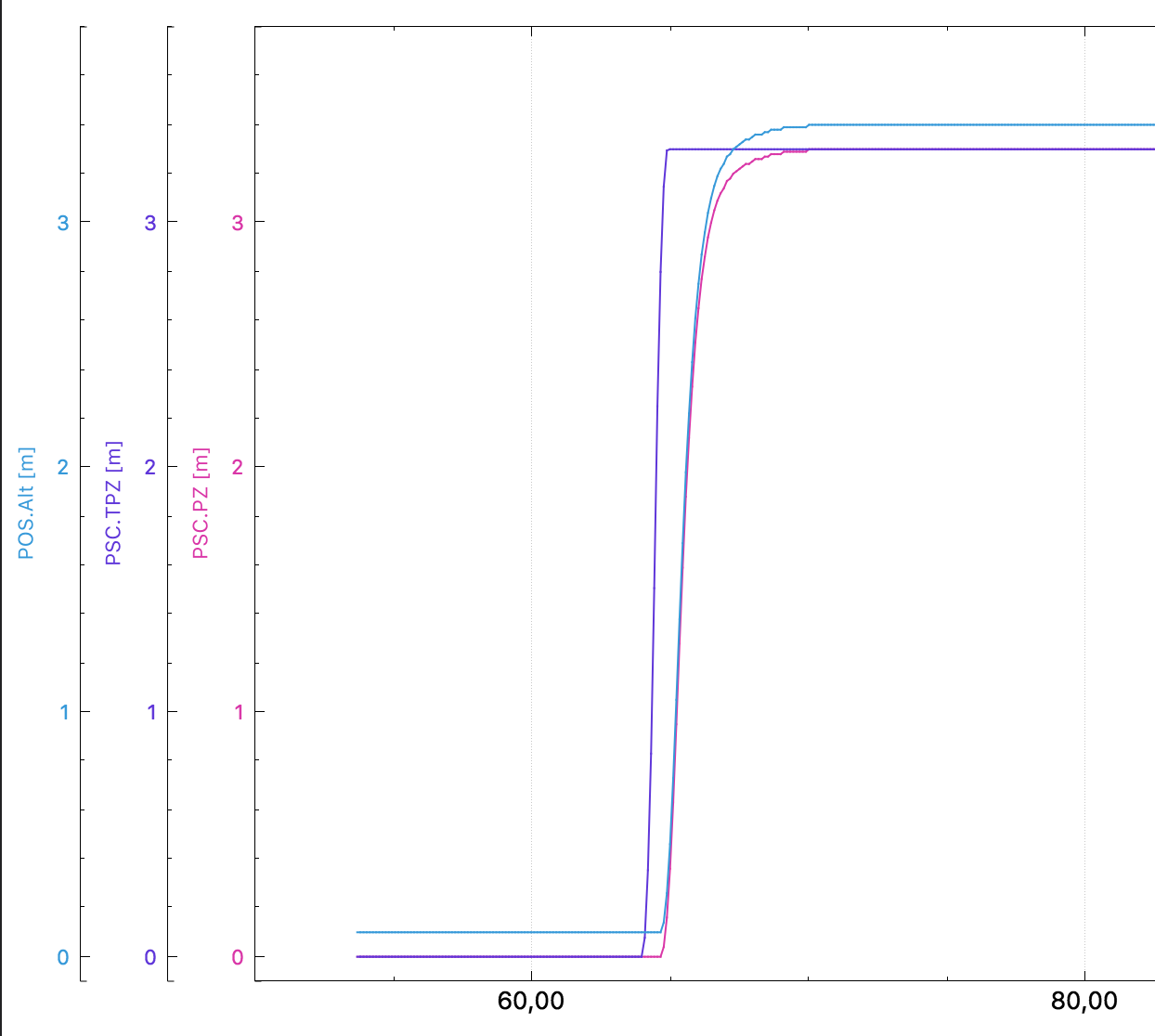
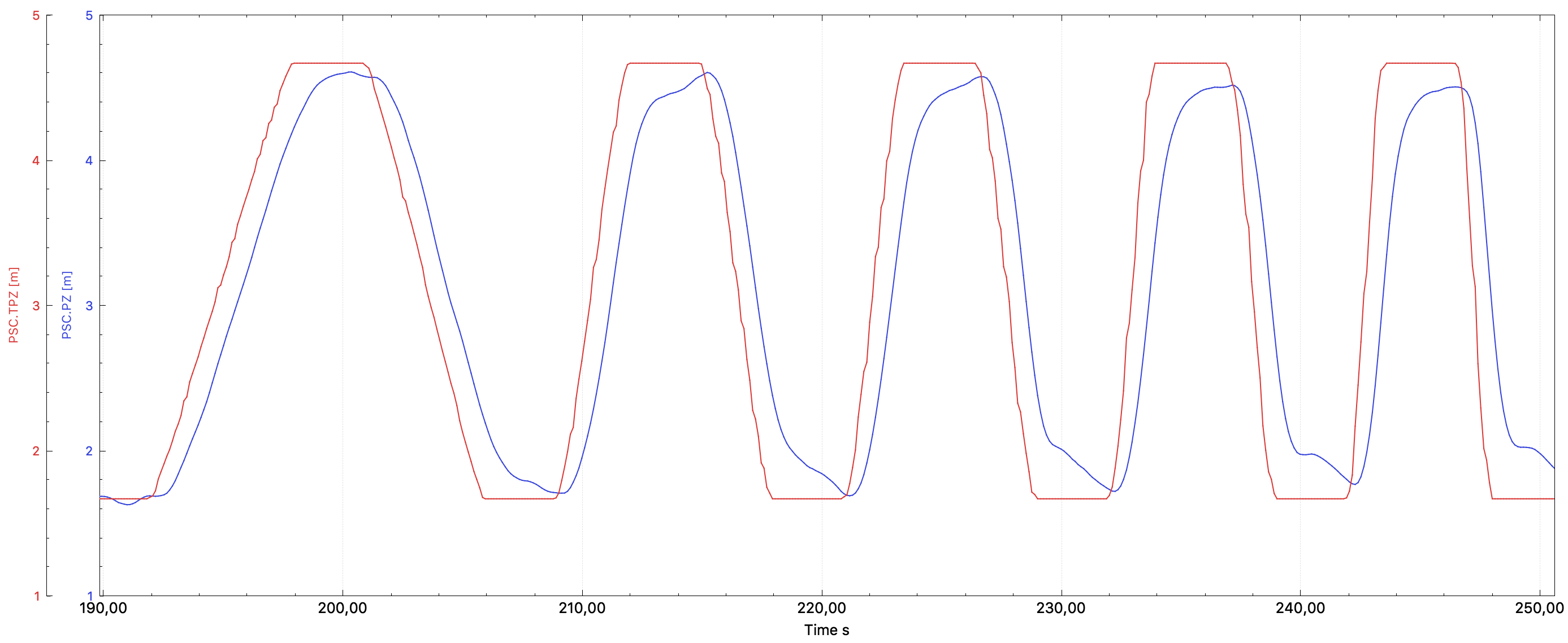
In SITL these settings seems to set a constant Z offset above target position. (Raising VELZ_P can reduce the offset)
How can I add position I term?
EDIT
Leonard answered that