I set up a new plane recently with 4.2.2, overall it flew OK but I saw a couple of very weird things in the log and on the OSD during the flight. Basically two things:
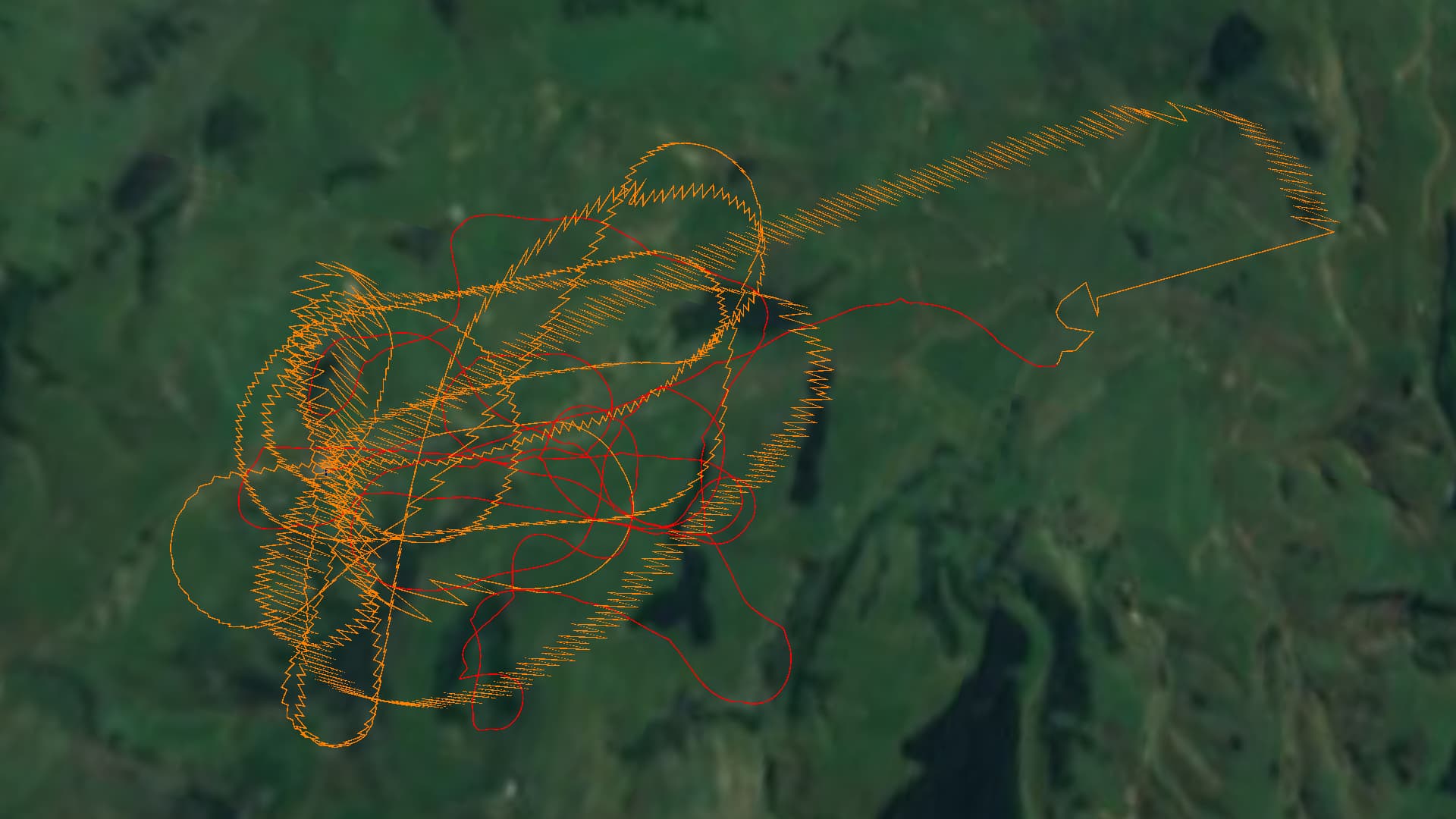
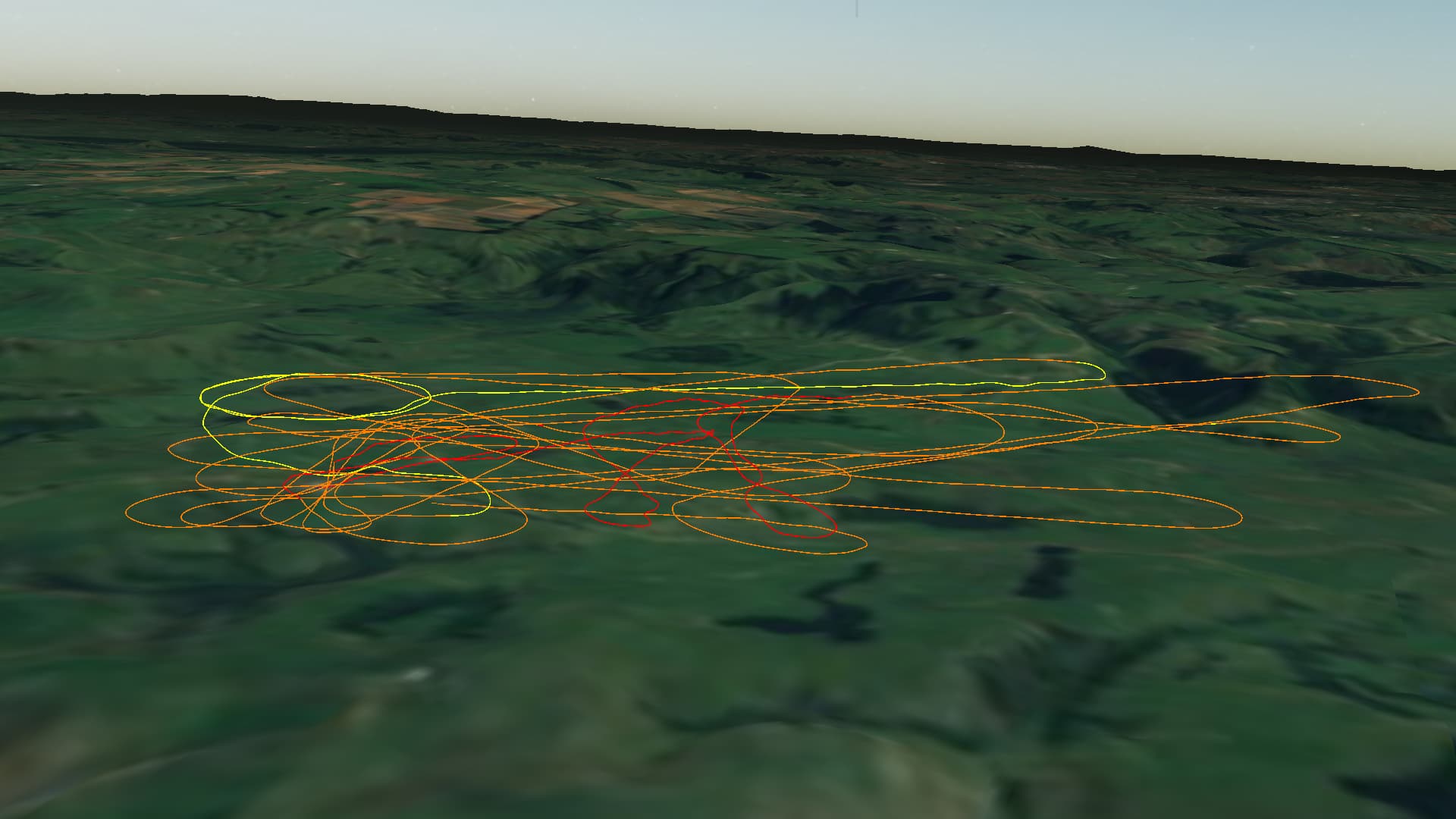
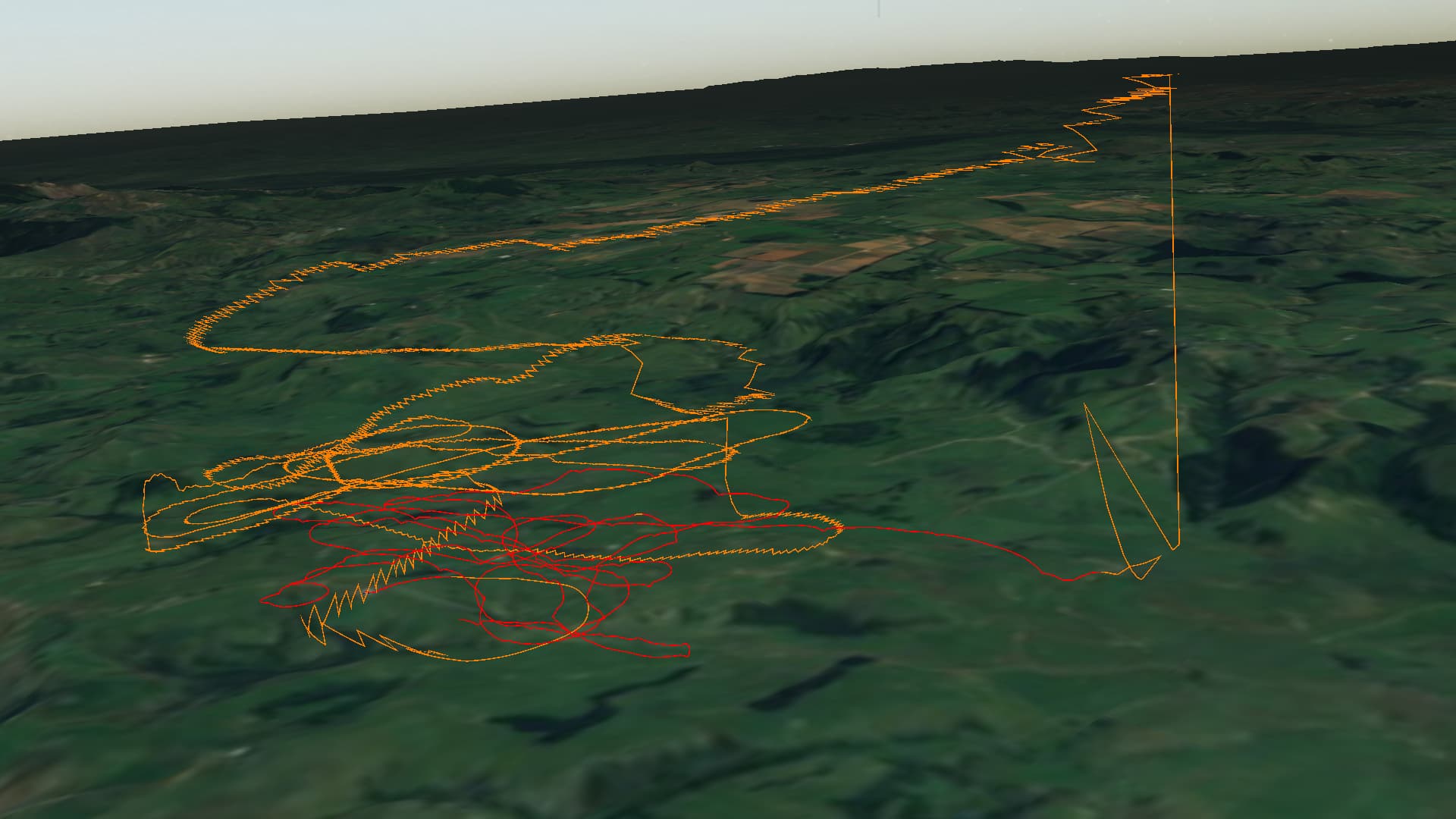
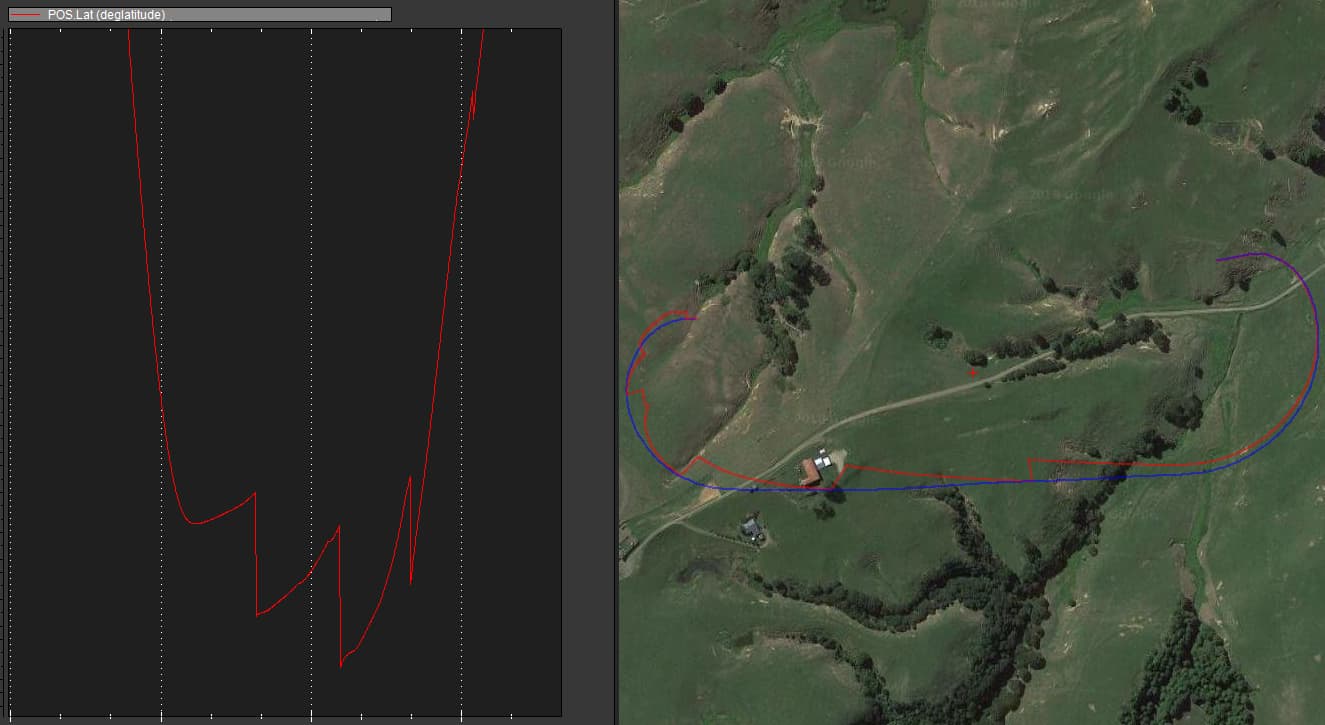
- the red line in the map (POS.lat and POS.lon) keeps wandering away from the true value and then is corrected suddenly
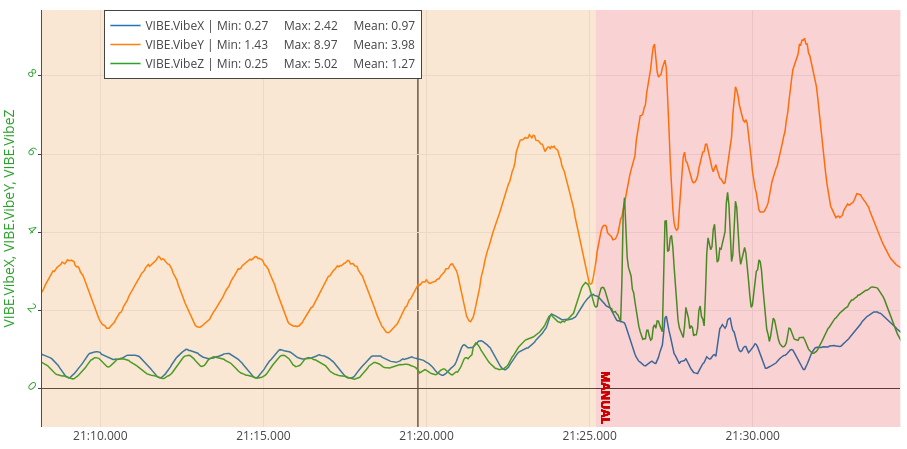
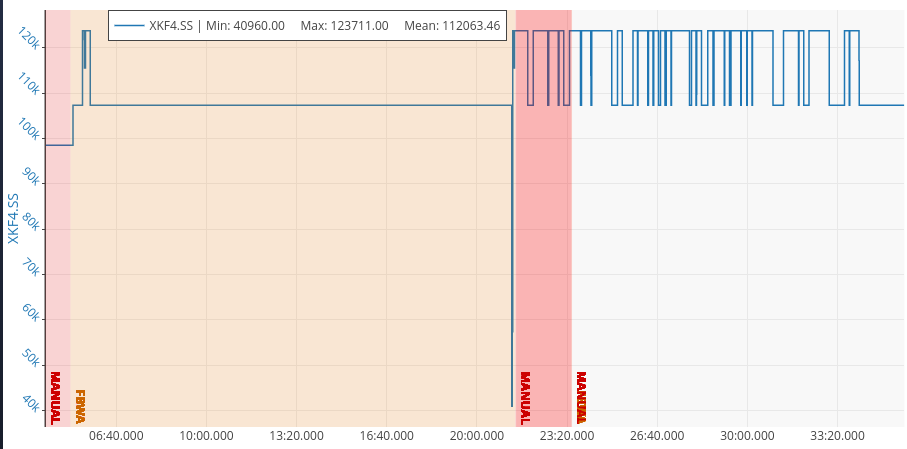
- the synthetic airspeed value is wildly high at times and grows even while plane is motionless after landing
I’ve uploaded the raw DVR footage from the flight here, where you can see the airspeed values in the OSD. Weird POS and CTUN.As values - YouTube
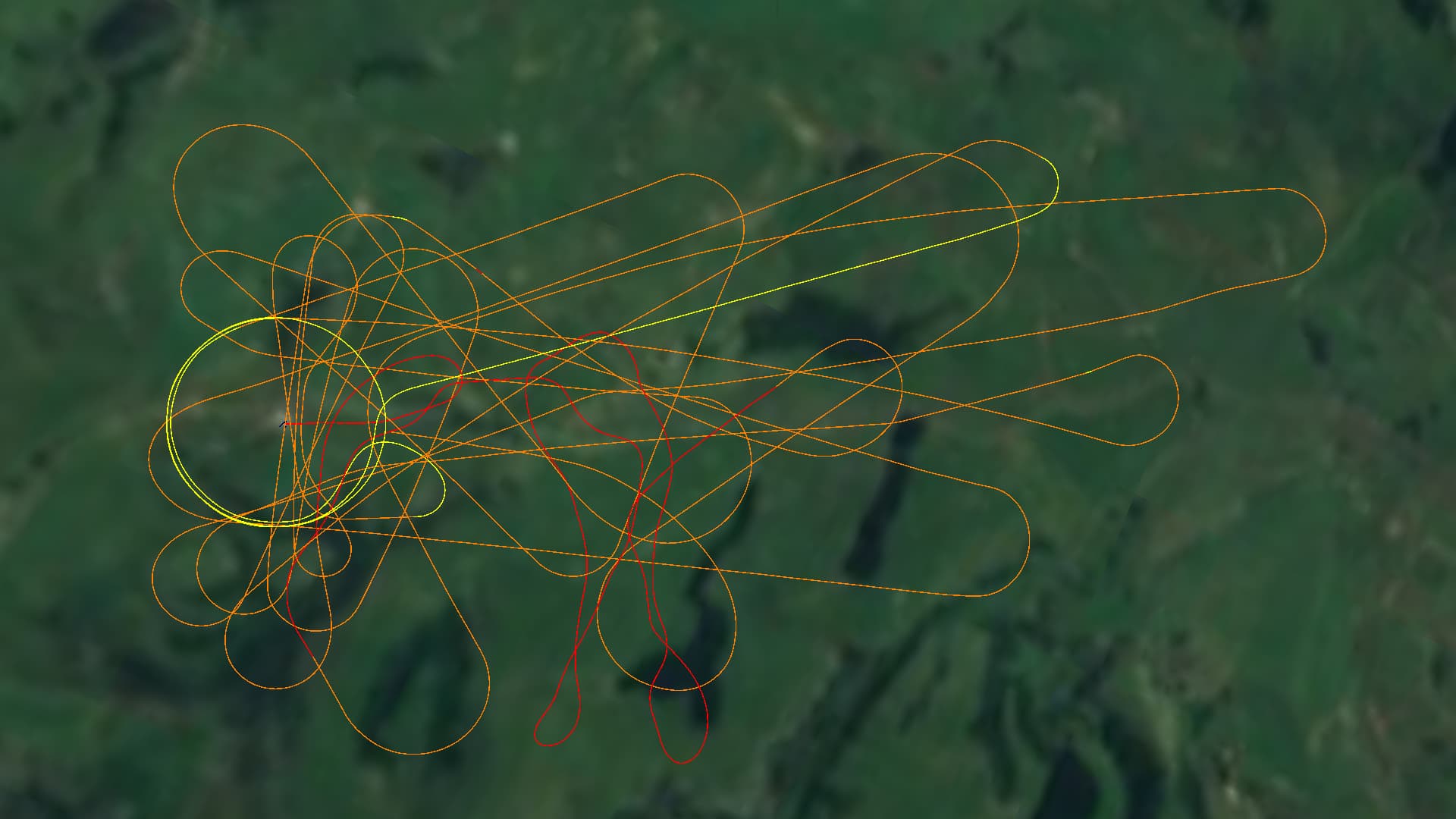
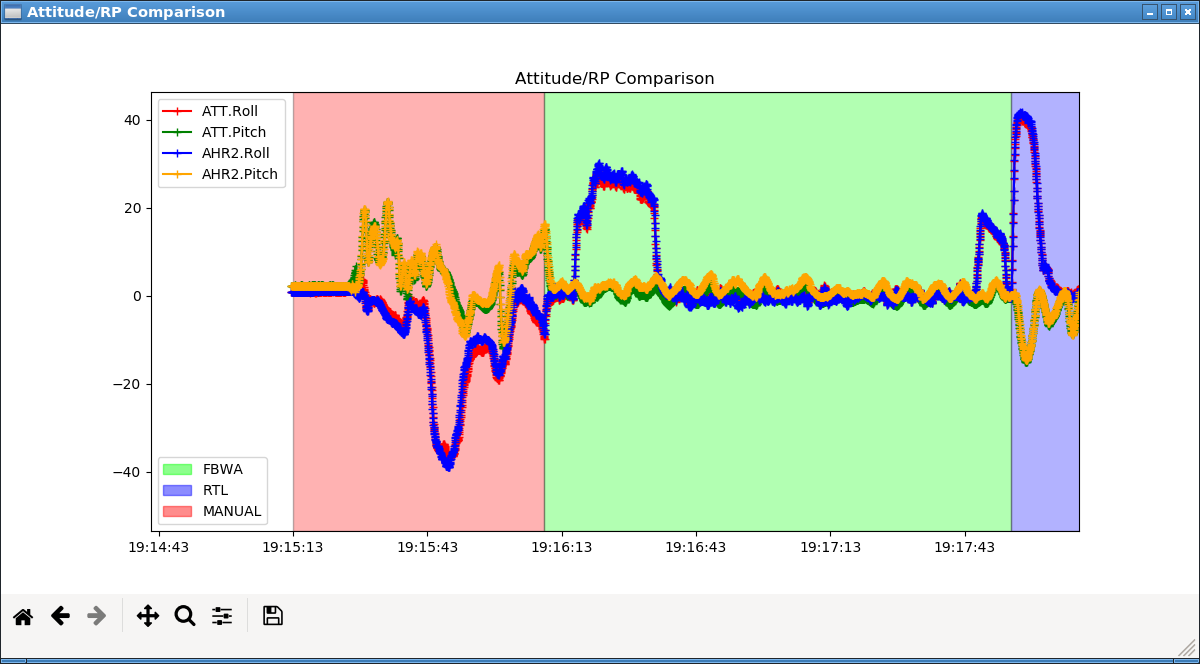
Normally when I look at a flight log the red and blue lines are so close that they almost look purple, eg.

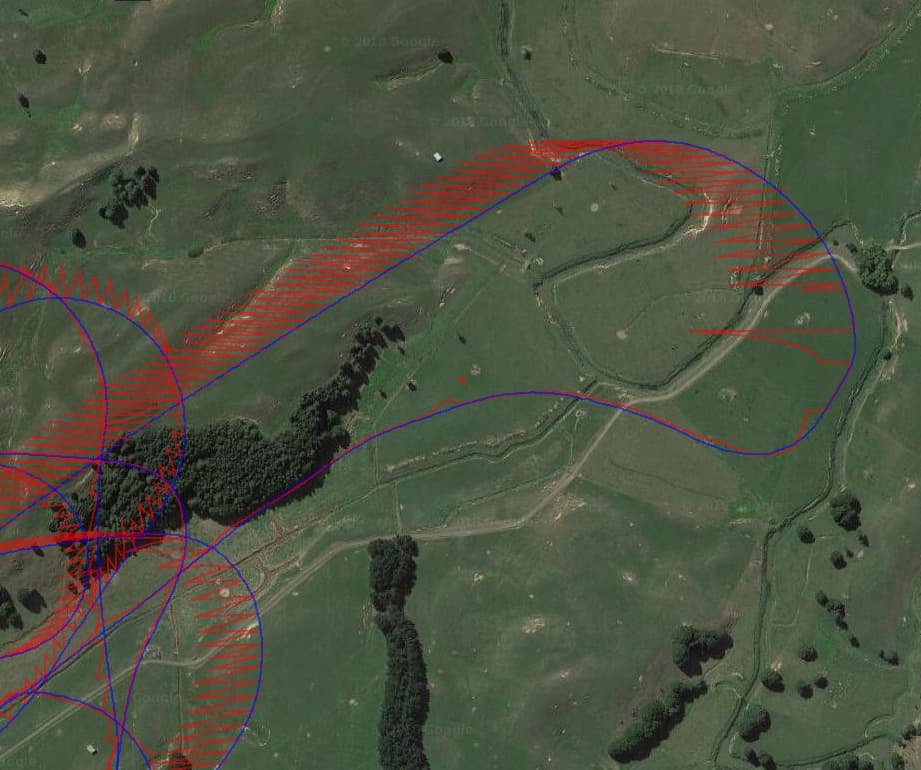
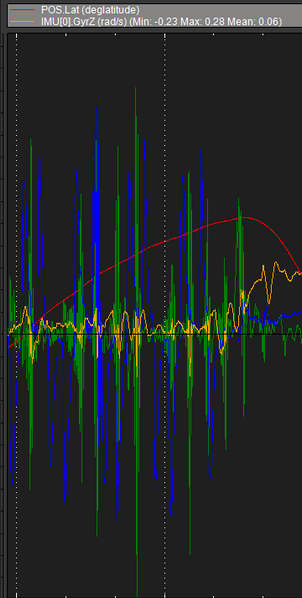
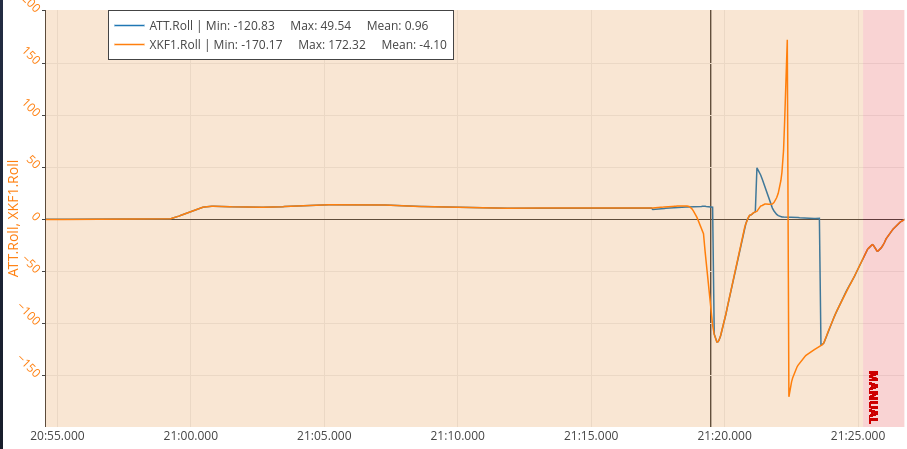
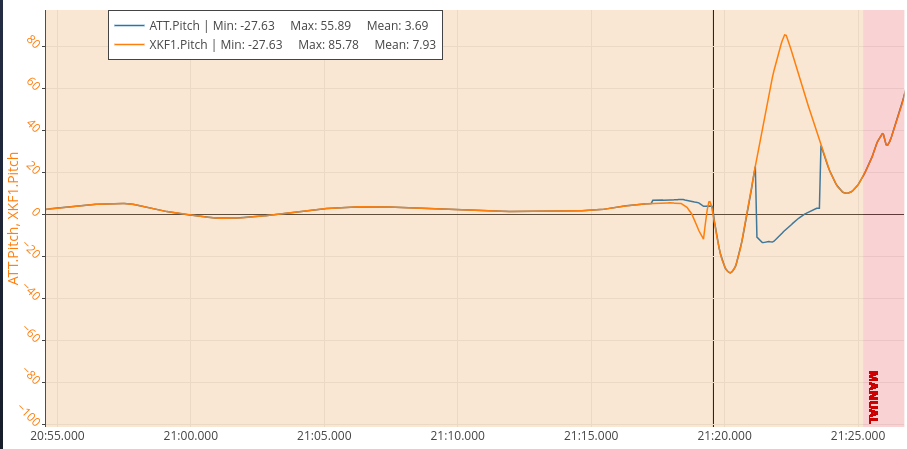
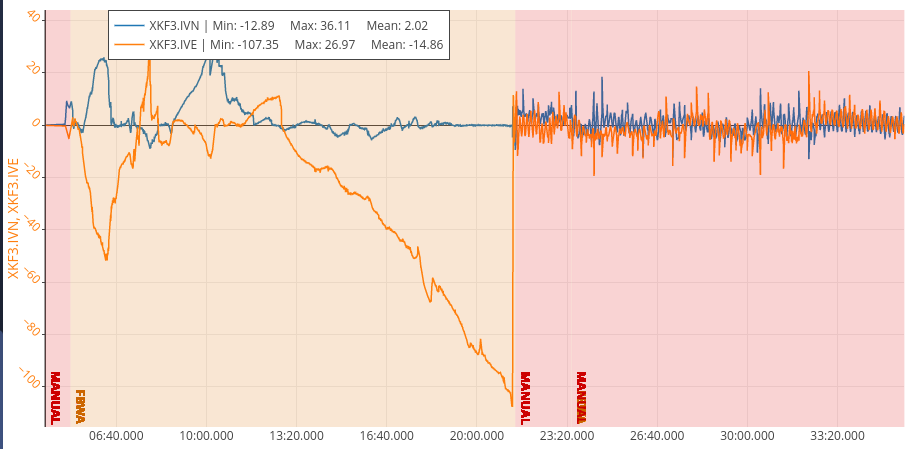
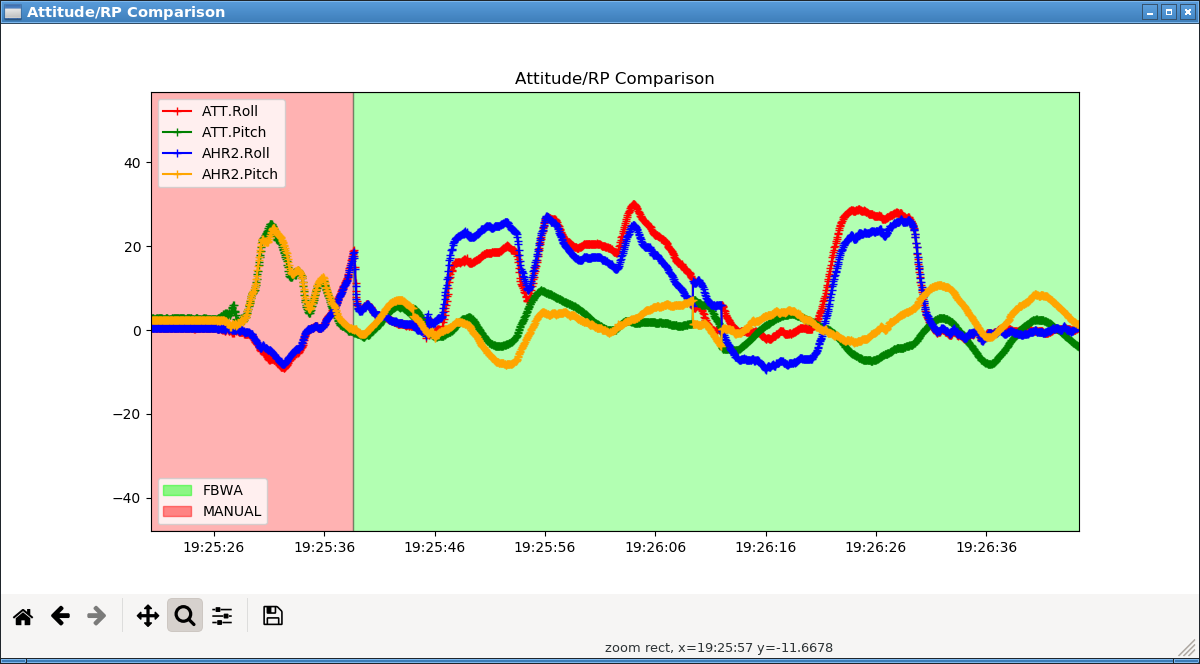
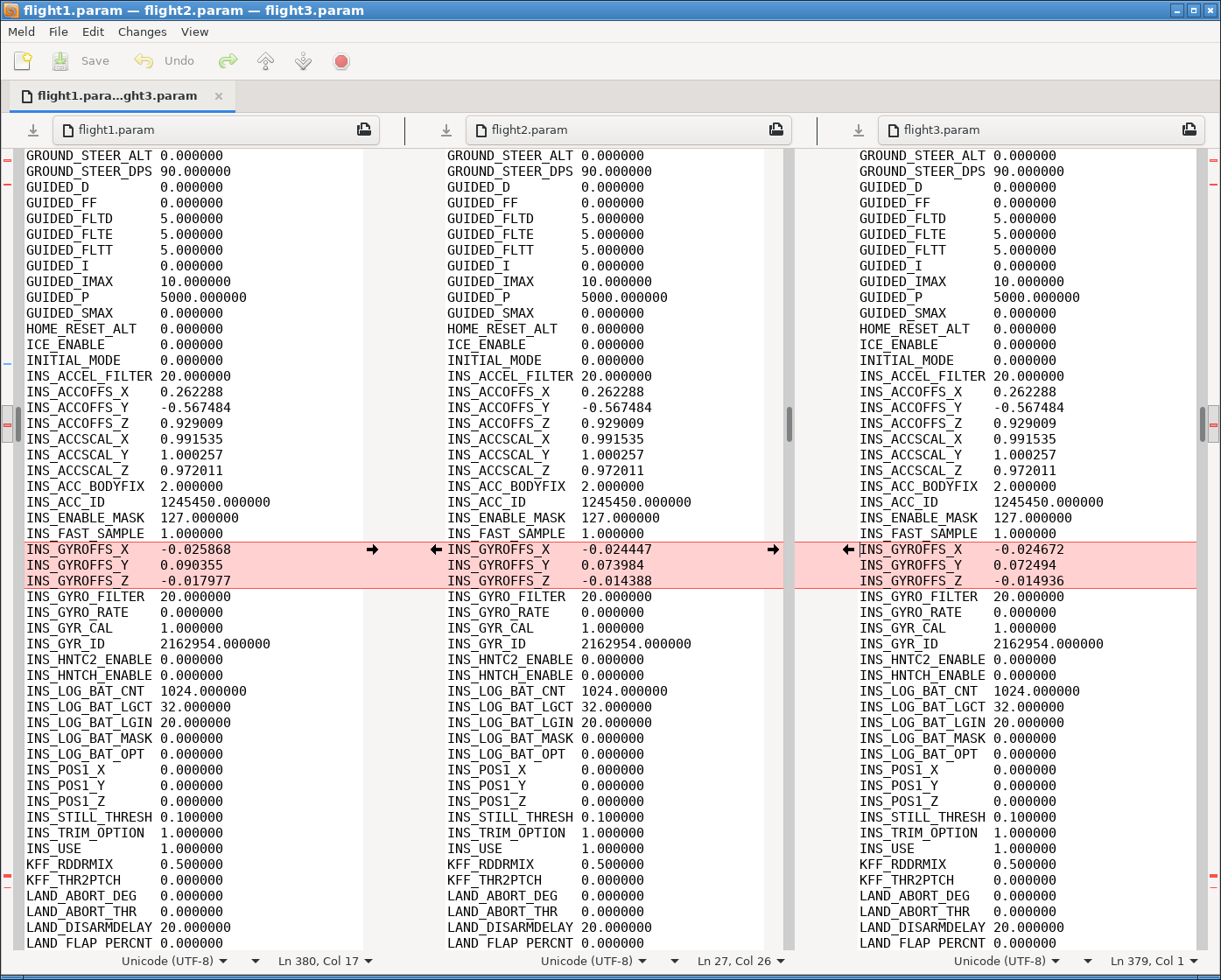
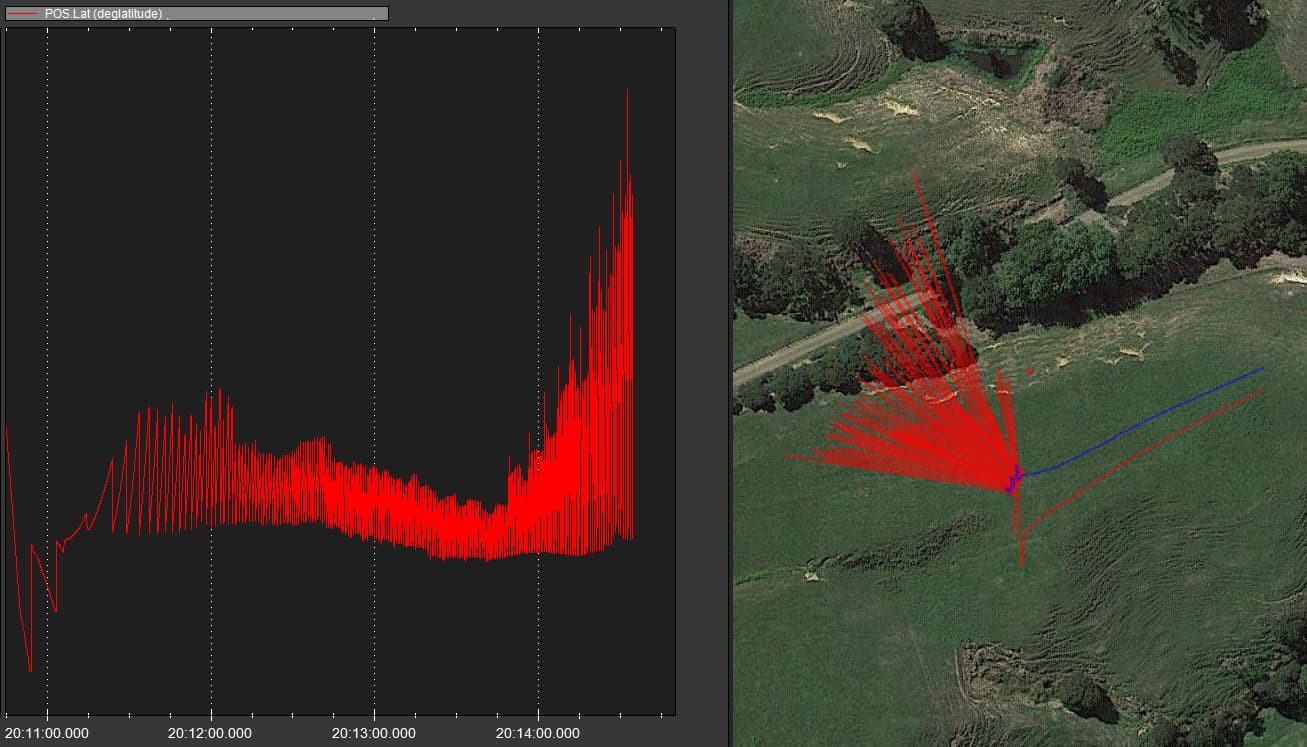
But when I opened this log the red and blue are quite different. Red is making very sudden movements.

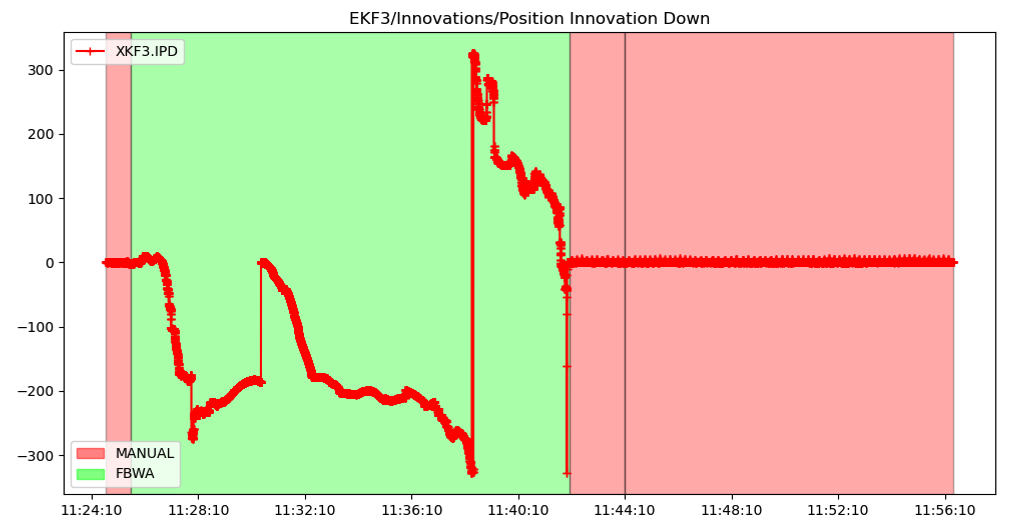
After a while I figured out that the red line is POS.lat and POS.lon. I still don’t know what the blue is, what is that? Here is a section where the POS value jumps a few times:
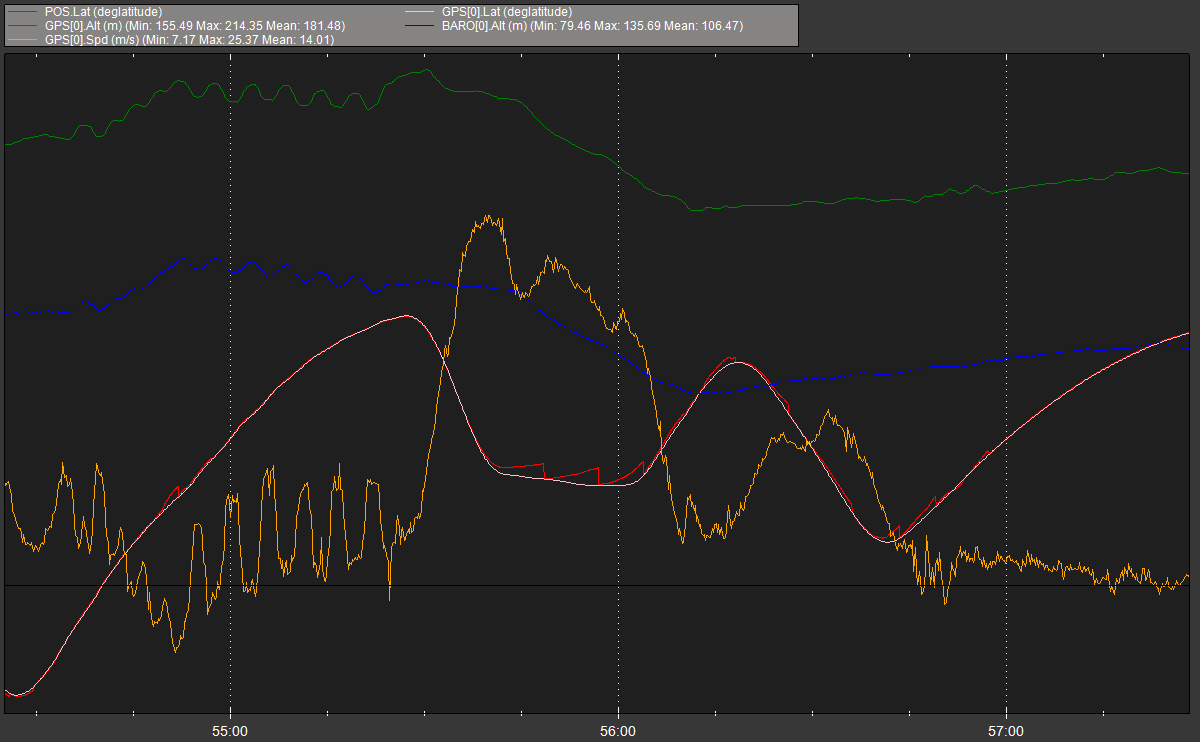
At first I thought it must be influenced by bad values from some sensor. Here is that same section related to GPS.lat, GPS.alt, BARO.alt and GPS.spd. None seem to show anything unusual.
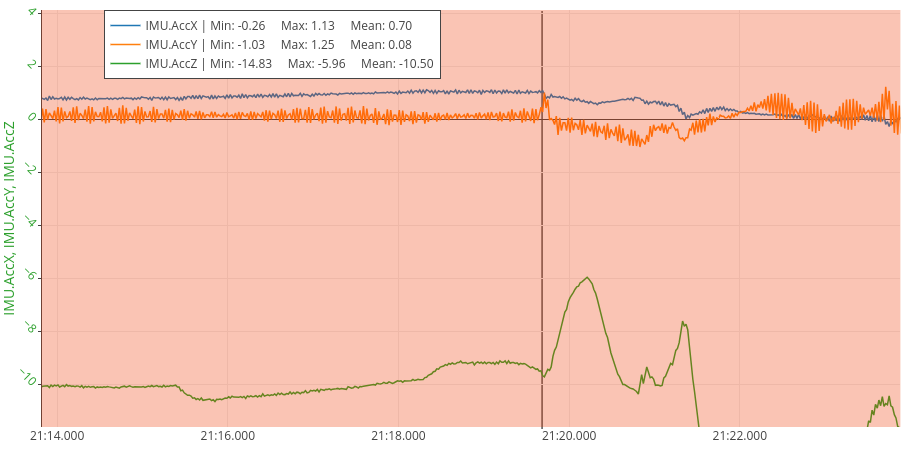
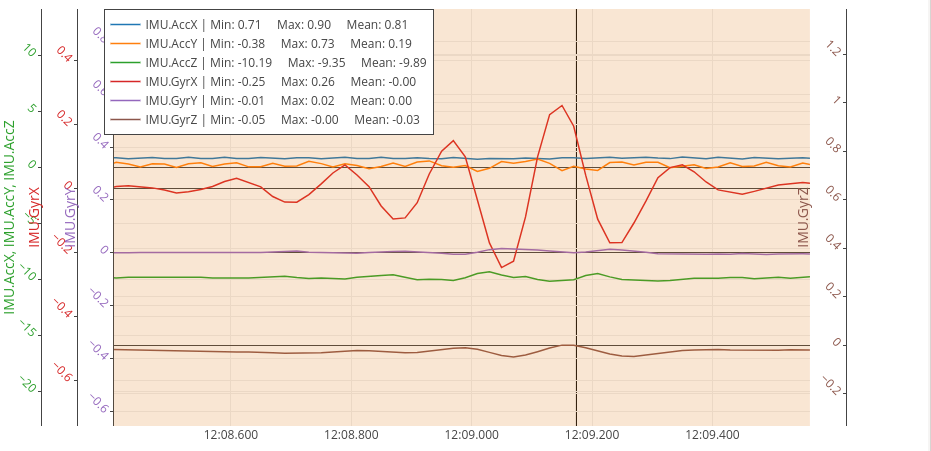
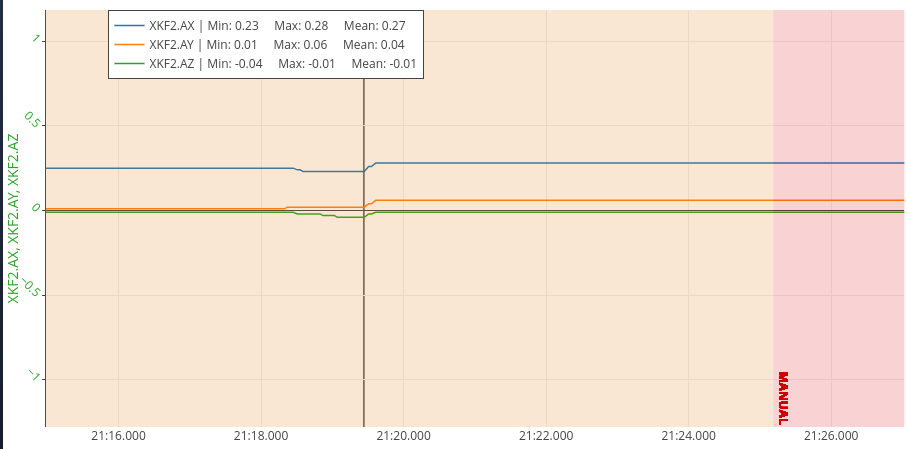
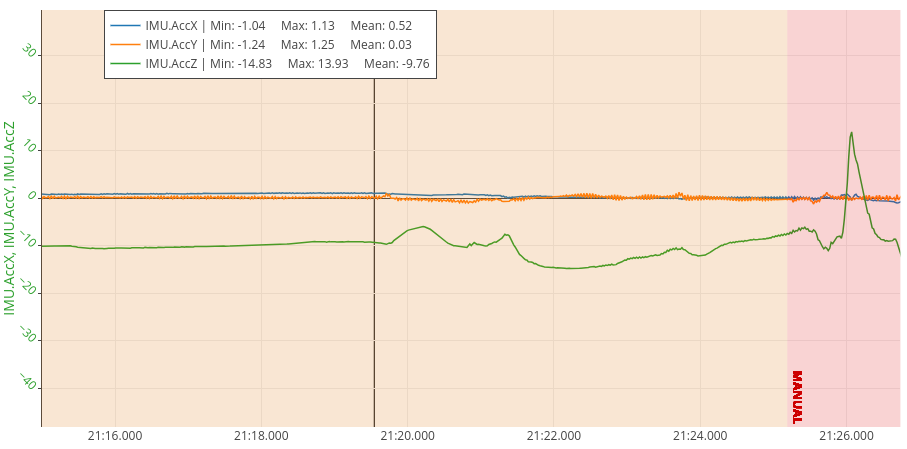
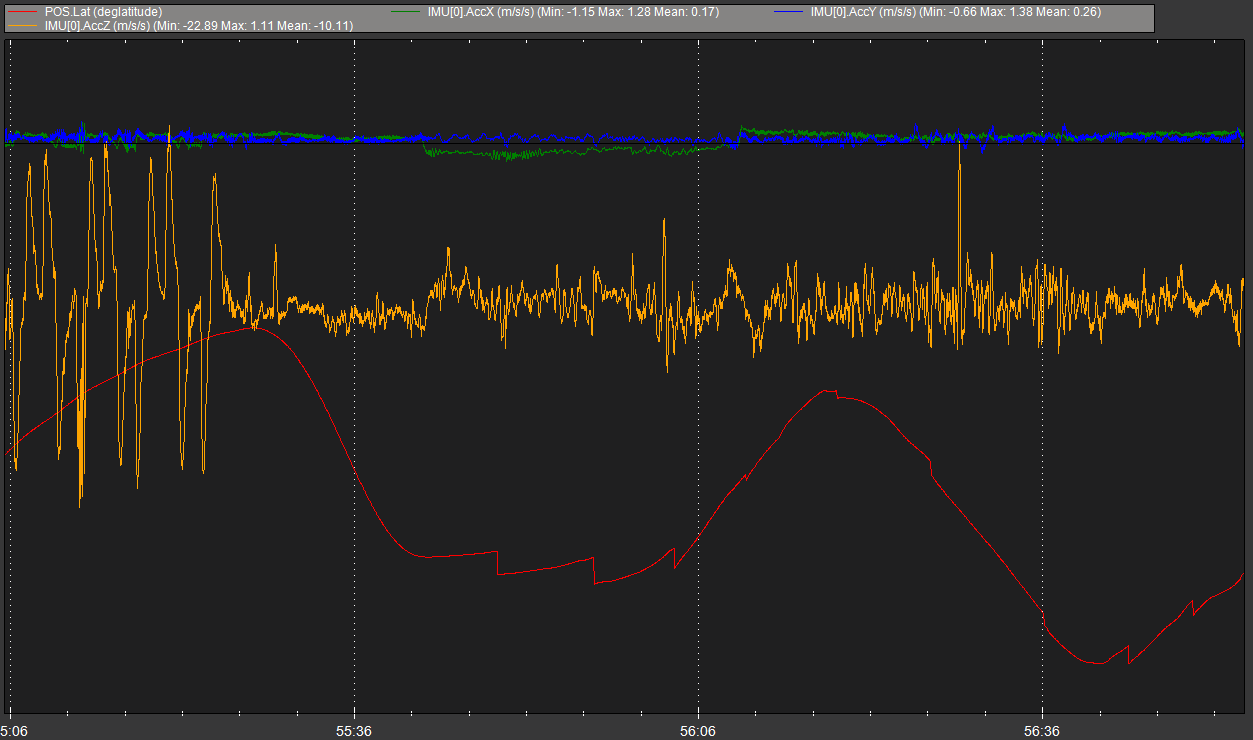
Here is the same section related to accelerometer values.
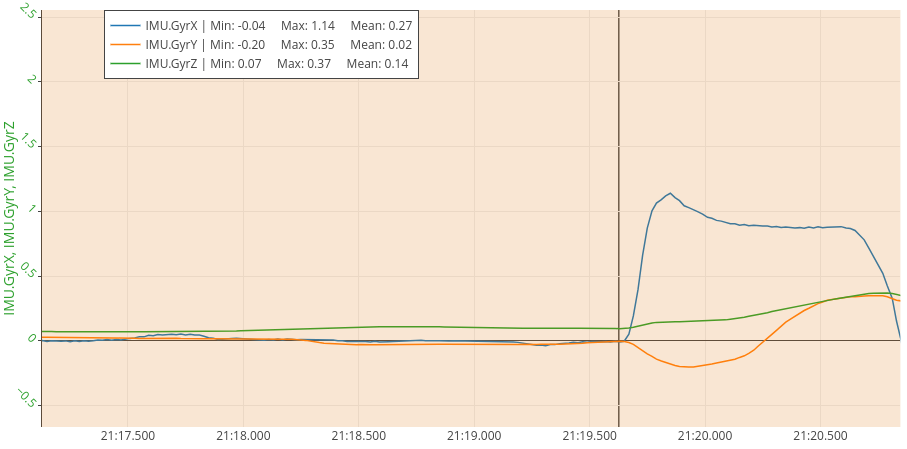
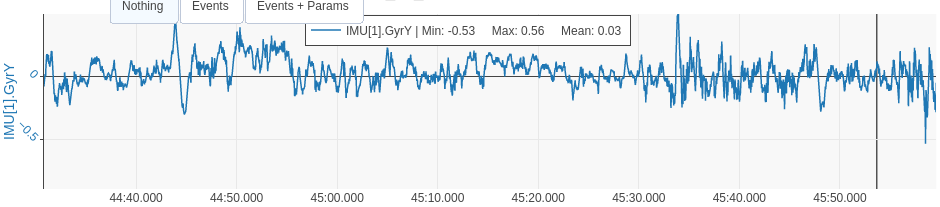
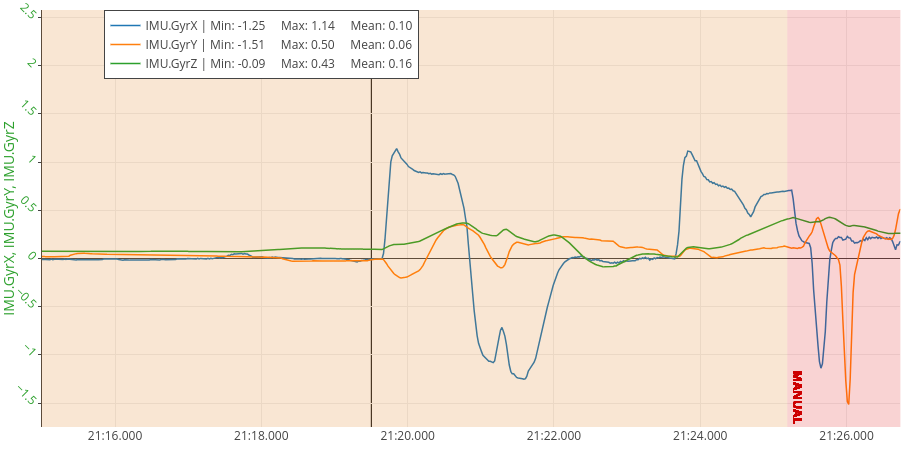
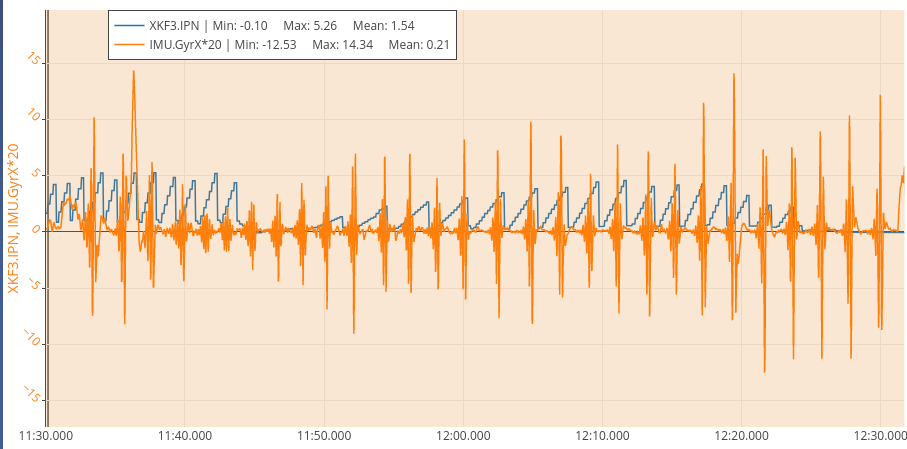
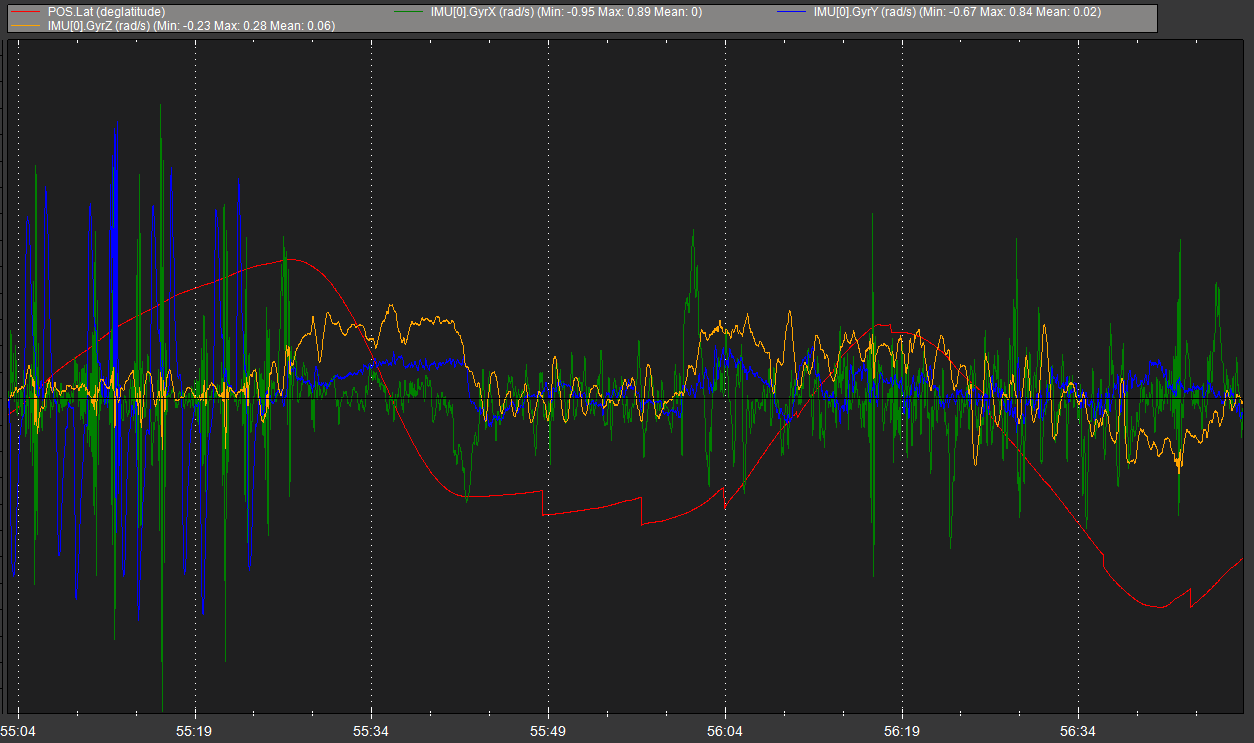
And here is the same section related to gyro values.
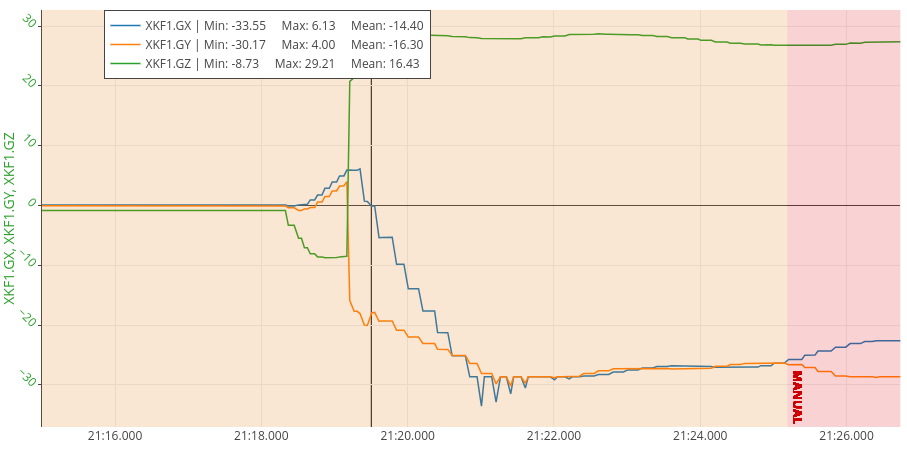
Here is POS.lat after landing while the plane is not moving.
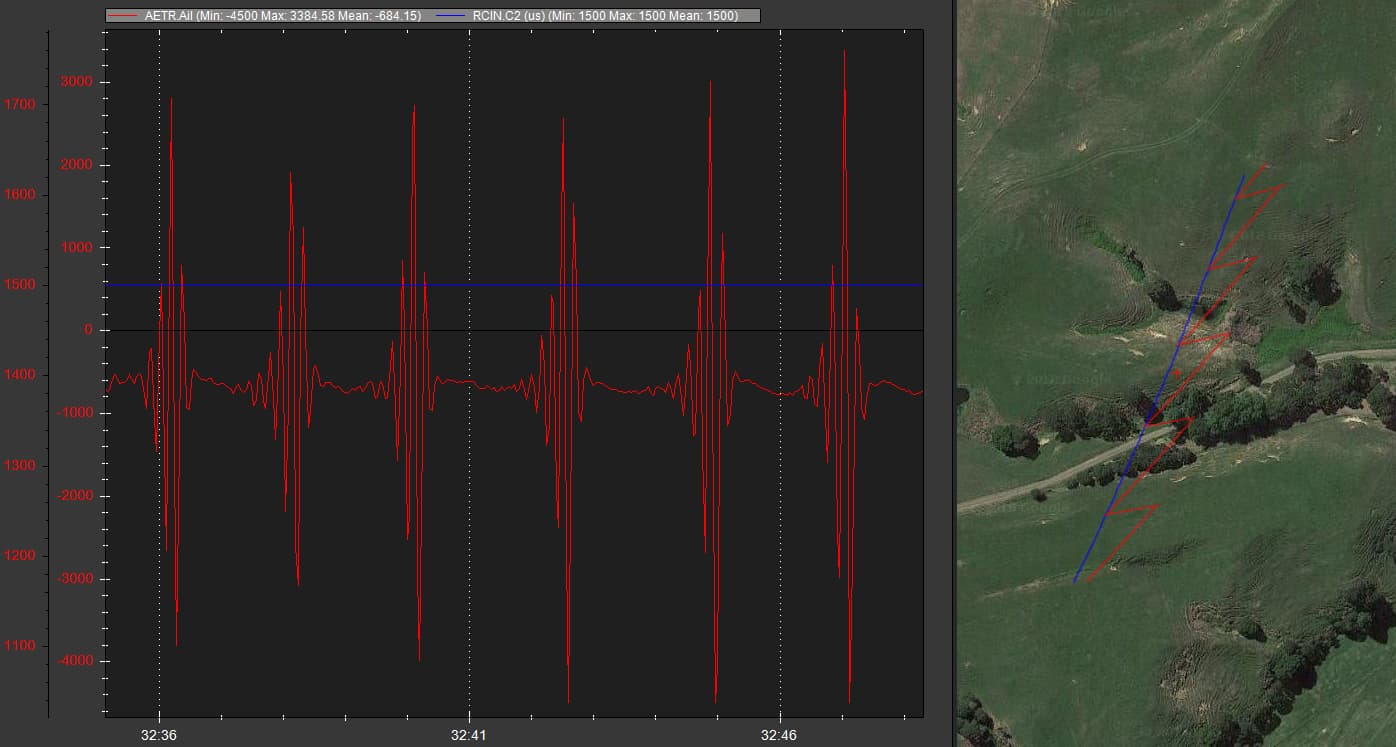
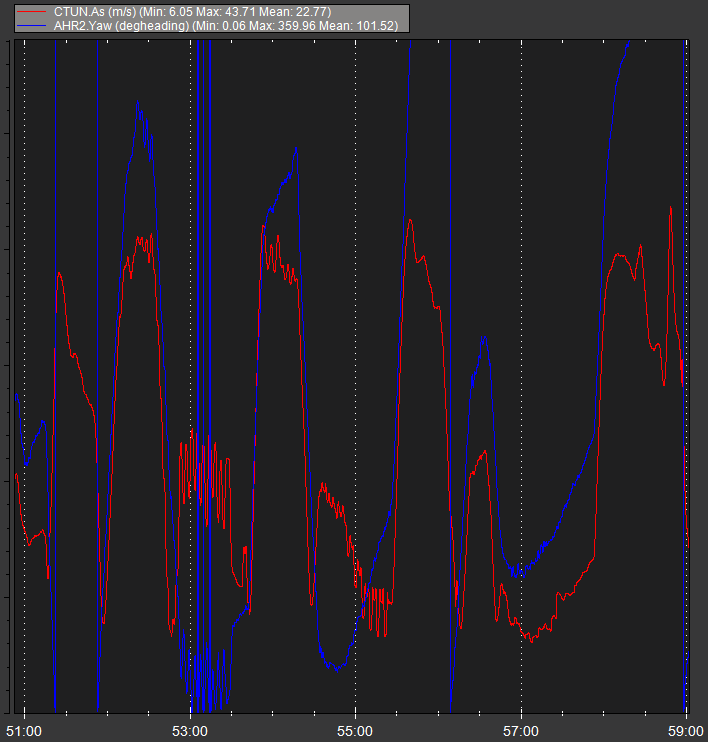
I noticed that the crazy increase in synthetic airspeed is related to heading. If I understand correctly we can expect some correlation between airspeed and heading, but not so that the airspeed swings this much.
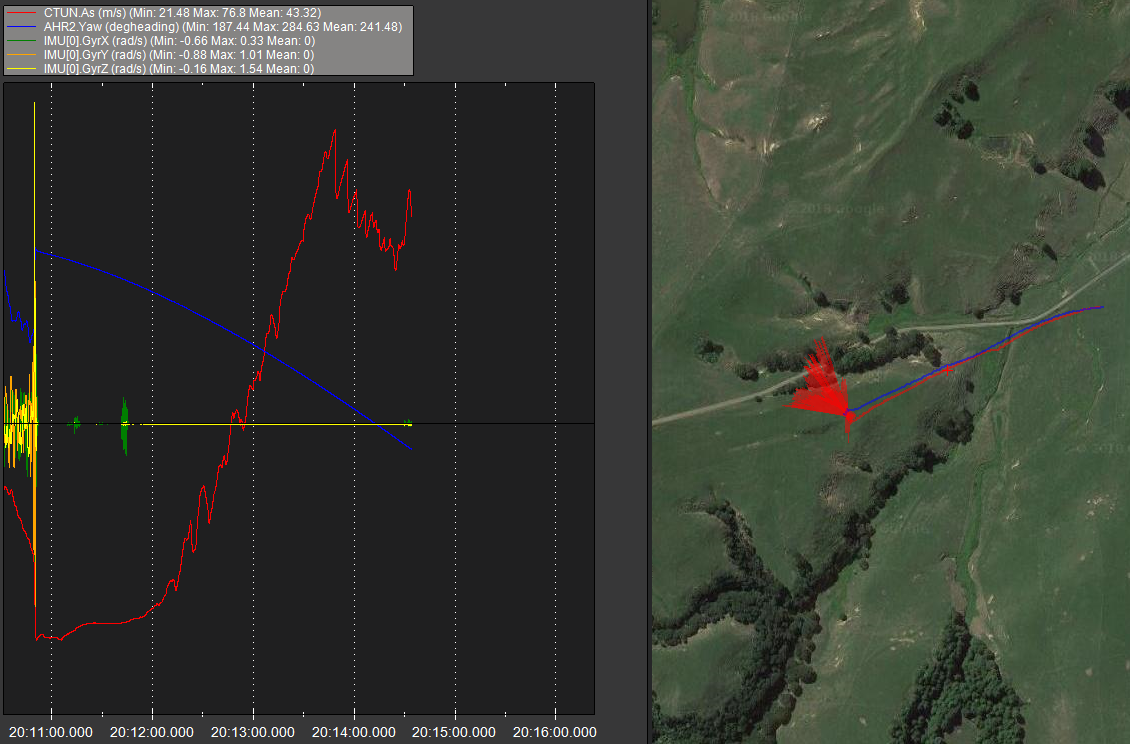
I also noticed that the yaw/heading is slowly changing after landing, while the plane is sitting still, about 100 degrees in 3 minutes. This might be why the airspeed climbs to about 270km/h at that time. Looks a bit silly on the OSD (see the video at 29:50). The gyro values seem healthy, I see no reason for the yaw to move so much while motionless.
In all my planes until now I have been using 3.9.8 so this is the first time I’ve tried anything newer - is there some new setup requirement I might have missed? There is no compass onboard.
So far I’ve mainly only used manual and FBWA modes so this weirdness wouldn’t have mattered, but going forward I’m hoping to try all the usual autonomous stuff too. I’m just a little uneasy about doing that without knowing a bit more about what’s going on here. Any tips would be appreciated.
ArduPlane V4.2.2 (693c9d91)
ChibiOS: 93e6e03d
omnibusf4pro 00310046 38395006 20373654
RCOut: NeoP:1-2 PWM:3-5 NeoP:6 PWM:7-8
IMU0: fast sampling enabled 8.0kHz/1.0kHz