We have a 22" X8 Copter with 12kg AUW and Arducopter 3.6.11 installed on it.
Motor: Tmotor MN501-S / 240kv
ESC: Tmotor Air 40A
Propeller: MF2211L
Battery: 2x 6S 16Ah in parallel
In the last days we have tried everything to make it fly smooth (main purpose is taking photos while cruising around in automission with 5m/s) but could not get yaw to work right.
I am happy with roll, pitch and the throttle management but if there is something to improve I would also try it out.
But the main problem is the yaw axis - it often feels sluggish, far from “locked in” and sometimes just does not turn at all - or even worse - turns in the opposit direction!
This does not happen if there is no wind but starts at very little wind speeds like 3m/s.
We made a flight to produce a logfile showing the problem good at 16:33:08 just before switching back to loiter mode for gaining control over the copter.
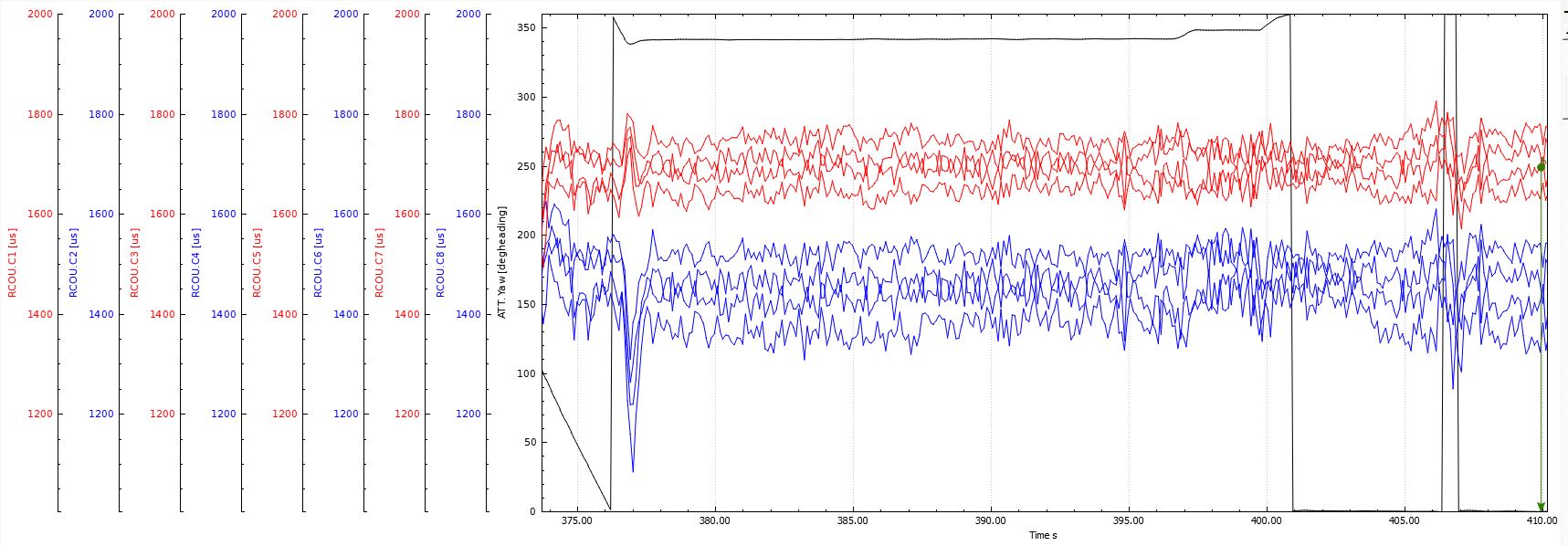
By comparing desired yaw vs. actual yaw you can see that it is not turning at all but even turns a little bit in the opposite direction.
Motor 6 just sits at idle for more than 10 seconds while this happens.
Also other motors are close to idle speed over that time.
I am wondering if it could be the weight/thrust ratio causing the issue (because it cant get enough torque to turn without gaining altitude)?
We tried almost everything that would affect Yaw Performance (P,I,D, yaw headroom, accelaration, rate, slew rate for automissions, etc.) and thats the best we could find…
A photo and the Parameter file are attached, the log file is uploaded to dropbox because it is to big - link attached.
We would really appreciate any help from you guys!
If there is something important that i did not mentioned please let me know.
If you didn’t do the log flight in cyclonic winds then you have a considerable balance issue between motors.
Have you checked the CofG ?
Have you checked all props are level?
Is the frame rigid enough?
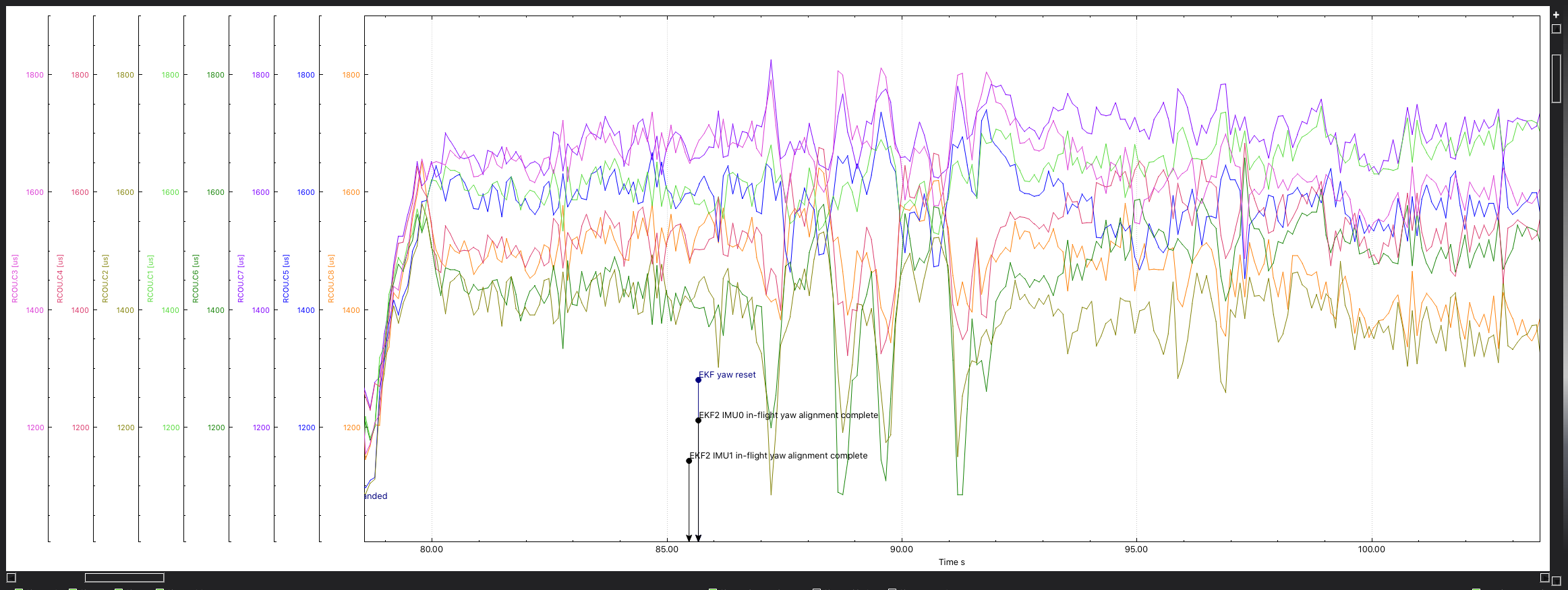
The motor balance issue is CW to CCW motors. Even when you are not commanding any yaw the CCW motors are being commanded higher with an average of ~1700us. Demand some yaw and it has no headroom left to do it. To Mike’s point it looks like it’s fighting itself possibly from arm boom misalignment.
-) I will check the CG tomorrow, all of the components are placed symmetrical but it is better to check.
-) What do you mean with props level? I spent a whole lot of time adjusting the Motor mounts parallel to the main Body with a pitch gauge (from rc Helis).
-) We replayed the hinges that are connecting the Arms to the body for more rigidity. I guess its rigid enough now.
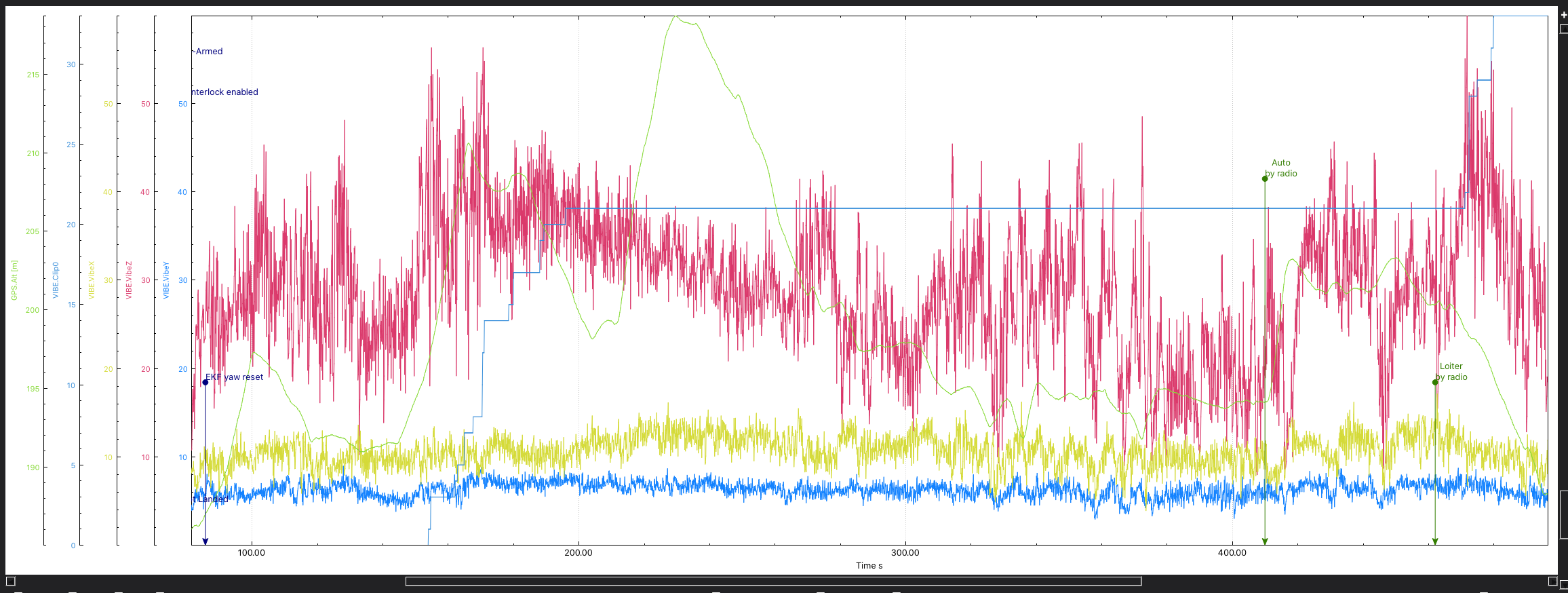
-) Where should I search for the Z- Vibes and what does clipping mean?
-) Ive been through all of the tuning pages several times before searching for help in this forum, but I guess the problem is related to a mistake of mine, so i keep reading and learning.
-) No, i have not autotuned because I read of desyncs on bigger Quads.
-) That makes sense to me. I will double check the arm/motor mount allignment tomorrow but i think it should be perfectly fine. Any other ideas for the balance issue between CW and CCW?
-) What tool are you both using to check the log data?
You were right, one arm was twisted.
Now all 4 arms are 0 degrees to the main Frame and screwed in place, there is no chance they will move now.
But sadly this did not fix the issue.
Besides that I recalibrated all ESC´s and made sure the timing is the same for all 8 Motors.
Motor “E” spins at 6%, all other Motors start Spinning at 5%.
I did it several times but it did not change the 1% difference.
Center of gravity is on point.
I am really hopeing for any further suggestions to try, we need this copter up in the air.
I made 3 short logs (maximum wind 3m/s):
1= hovering without any Inputs
2= turning 360 degrees - three times left - three times right - with hard stops at the end
3= flying a square with four relatively sharp corners - 2 times left - two times right
Changed the ESC (we had two spare ESCs but no motor), measured again and now all 8 Motors are close to each other.
Motor balance issue is gone (auto analyse from missionplanner says good at 51 while hovering in light wind).
We also made a flight with 22km/h Wind (max. 37km/h) and had no issues (Auto analyse says fail with 151 for this one but it was total flyable and with no payload it is pretty overpowered, every motor was at value 1100 at least once in that flight).
So hopefully the problem is gone - will make more test flights next week!