Sometimes during TakeOff as first mission point, throttle remains arround 60% instead of rise to 100%. Due to this the plane doesn’t get good speed after the manual launch and it falls.
I’m flying without an airspeed sensor, so looking in the code I see the pitch during takeoff goes as follow:
nav_pitch_cd = ((gps.ground_speed()*100) / (float)aparm.airspeed_cruise_cm) * auto_state.takeoff_pitch_cd;
nav_pitch_cd = constrain_int32(nav_pitch_cd, 500, auto_state.takeoff_pitch_cd)
However I don’t see a specific throttle control during TakeOff so… I guess the TECS (Total Energy Control System) gets throttle control even during takeoff with the normal control (possitive pitch case):
_throttle_dem = nomThr + (_THRmaxf - nomThr) * _pitch_dem / _PITCHmaxf;
Since at the moment of launch GPS ground speed is low, the demanded pitch is low and as demanded pitch is low the accelerator doesn’t go up to 100%. Could this be the cause of not having 100% throttle during takeoff?
My takeoff param are the following:
TKOFF_ACCEL_CNT=1
TKOFF_THR_MINACC=12
TKOFF_THR_MINSPD=2
TKOFF_THR_DELAY=1
Once these conditions are met, the throttle turns on without problem but not at 100%
TKOFF_LVL_PITCH=18
TKOFF_THR_MAX=0
THR_MAX=100
With this params I understand the plane should climb with 100% throttle at 18º but it stays at 5º with 60% THR
(cruise flight conditions are TRIM_THROTTLE=45 with TRIM_ARSPD_CM=1200)
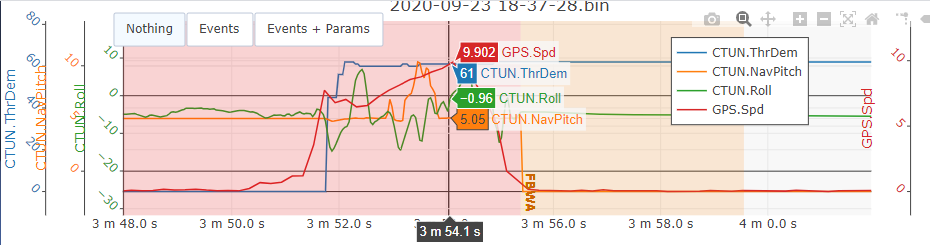
I can’t add a log where you can see thr frozen arround 60% during takeoff and pitch arround minimun allowed for takeof (5º) because it’s to big but…:
Do you have the same problems during takeoff with manual launch without airspeed sensor? Do you think the code could be modified to take off with a 100% THR (regardless of the throttle nudge)?
I know I can solve this problem adding some throttle nudge with the stick but… other times it does reach 100% THR well at takeoff without any throttle nudge. I add here a log where you can see the correct takeoff this time with 100% THR: https://1drv.ms/u/s!AgkmnFn0n1OUgkuoMBjEI2ft6k48?e=e5YLIQ
I don’t understand this difference in auto takeoff what is it due to
On the 60% throttle takeoff you tried to launch the plane in AUTO mode with the mission NOT (re)set to takeoff. This leads to a throttle target value of 45% as set for level flight.
As you found out it’s not sufficient for takeoff.
Further more on the bad flight you disabled ARMING_CHECK. Are there any reasons for this?
I don’t understand: “with the mission NOT (re)set to takeoff”, the first mission comand is a Takeoff one, so… how can I set the mission to takeoff if it isn’t with this comand?
For the arming_check disabled… no reason, I probably forgot it after doing some test
Hi,
One chance to try to takeoff with mission not set to start is after done a (partial) mission before.
There are different possibilities to reset the mission.
use parameter RST_MISSION_CH to reset the mission manually link
use MIS_RESTART = 1 This will reset the mission every time you leave and reenter AUTO mode link In the default configuration ArduPilot will resume a mission.
Thank you very much!
So… I’m having bad takeoffs because mission had been executed before and now when the mission started again it didn’t switch to Takeoff mode but instead it went into Auto mode to try to find the last waypoint executed and continue from there, isn’t it?
I don’t understand why… I don’t remember having executed the mission before, the failed launch (60% THR) was the first one with this mission written, but I’ll try to restart mission and I’ll let you know
Sometimes if you cycle thru modes prior to launch (e.g., trying to find the auto position on a rotary switch), Arduplane will think that the 1st waypoint has already completed.
I have the momentary switch on my TX set up to send a command to “restart mission at beginning”. That way, I can get everything set so that the switch into auto will always work. This is very handy if you’ve flown once and then decide you want to take off again:
ST_MISSION_CH: Reset Mission Channel
Note: This parameter is for advanced users
Enables a channel to reset the mission to the first waypoint.
Mission restart is triggered by channel rising above 1750 PWM. 0 disables.