Ricoman
July 31, 2023, 2:21am
1
hello
My quad sometimes behaves like a bad gps.
I’ve tried many things, but I suspect bad hardware.
The error during takeoff and landing is very large.
My quad, which was still, sometimes turns around on its own.
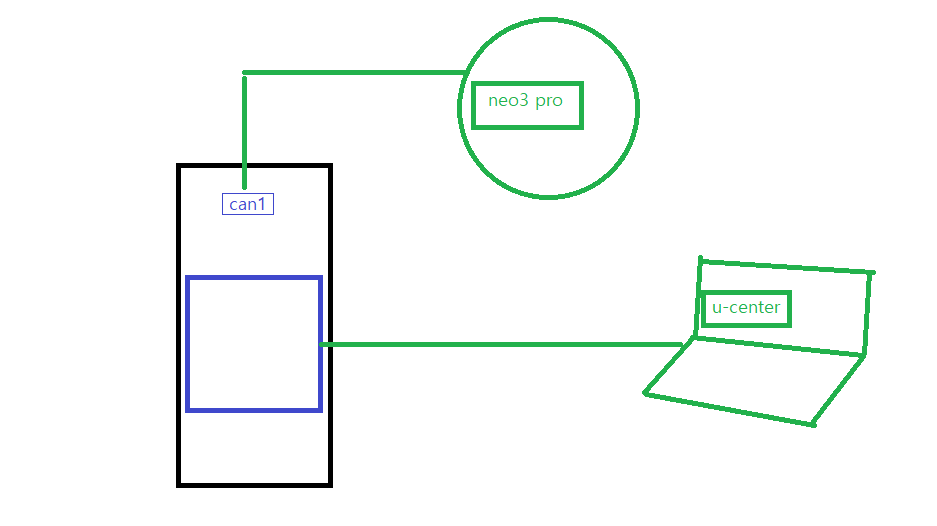
I want to check the status of the gps module by connecting u-center.
Is there a way to connect to u-center like this picture?
Pixhawk’s firmware is the latest version.
Yes, you can use Serial-Passtrough or UBlox documentation . The documentation explains it AFAIK. And mission planner also has a SLCAN passtrough function in the CAN tab
Ricoman
August 1, 2023, 2:04am
3
https://ardupilot.org/copter/docs/common-serial-passthrough.html
is this page correct? Or is the parameter name USB-Passthrough?
dkemxr
August 1, 2023, 2:47am
4
Try from the Control-F menu in Mission Planner, there is a function button there. It might work.
Ricoman
August 1, 2023, 4:27am
5
is this what you’re talking about?
The menu called “usb-passthrough” is not visible.
Additionally, I already read the forums about “MAVSerial pass”.
It’s not working…
I also found other posts on the discuss.
I also touched the serial_pass parameter, serial_baud, serial_function, etc.
Can you tell me the right setting or method for neo3 pro?