Recently, I was tuning the altitude in 3.4.6.
The drones rise quikly, but before it reaches the desired value, it goes down and hit the ground. After a second, it goes up without reaching DSAlt, then goes down again, back and forth.
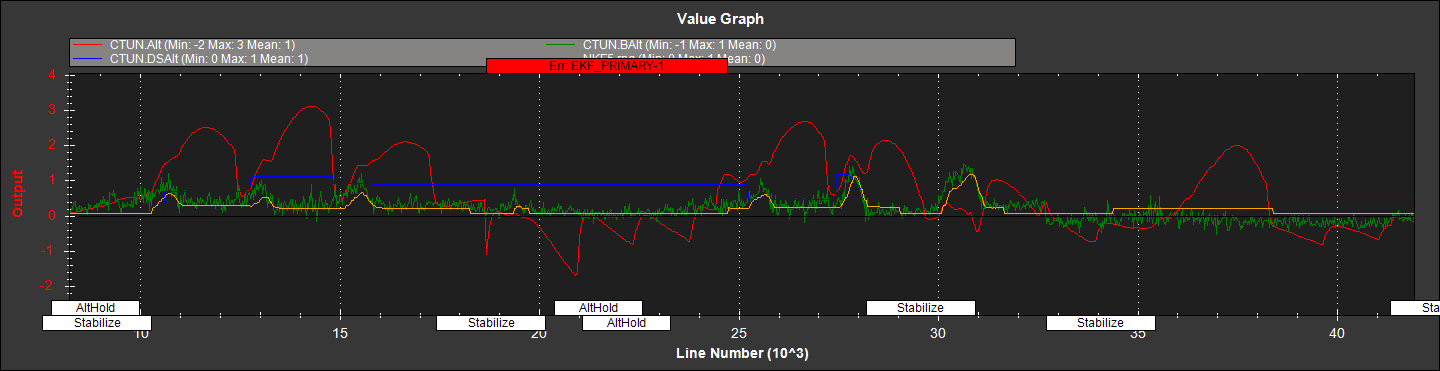
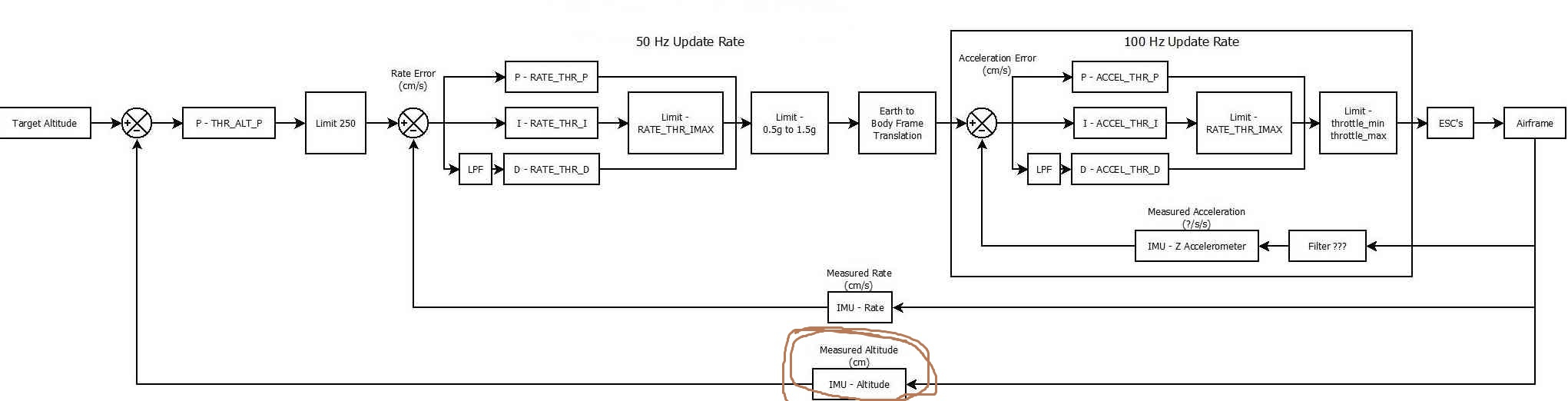
I looked into the Ardupilot about ALT mode, then I found that the control loop only using IMU as a altitude estimation. I wanna know wether the control loop is updated in 3.4.6 or not.
File is too large to upload here, Here is my bin file:
172.bin
164_alt_mode.bin