
There is a new puppy in the family !!
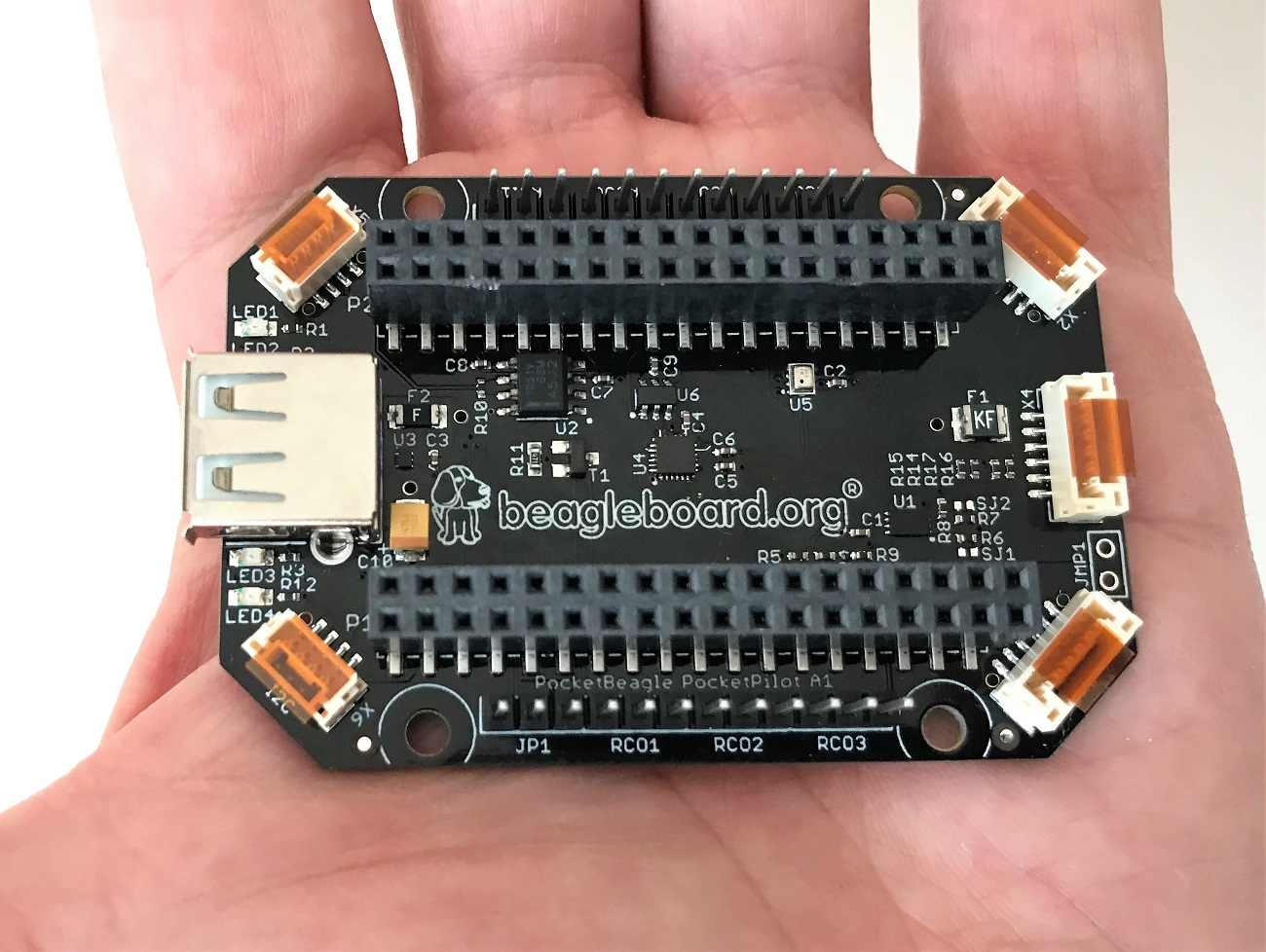
PocketPilot is a smaller versions of the BBBmini (https://github.com/mirkix/BBBMINI), designed for use with PocketBeagle (https://beagleboard.org/pocket, a small version of BeagleBone Black). It provides a very small & light-weight open-source ArduPilot based autopilot / flight controller for quadcopter drones & robots.
Summary of Technical Specifications
Processor: Octavo Systems OSD3358 1GHz ARM® Cortex-A8
512MB DDR3 RAM integrated
Integrated power management
2×32-bit 200-MHz programmable real-time units (PRUs)
ARM Cortex-M3
72 expansion pin headers with power and battery I/Os, high-speed USB, 8 analog inputs, 44 digital I/Os and numerous digital interface peripherals
microUSB host/client and microSD connectors

For test and initial developments, I have build a prototype using through-hole components & connectors, with sensor modules soldered directly on the breadboard. Since it doesn’t need any SMD components, this is relatively easy to build, for an experienced builder by following this schematic:

Please note that there is no ESD protection for USB1 on the prototype, so be very carefull if you plan to use it. We will implement proper protection on a PCB release.
The initial flight test was performed on a 450 class quadcopter == Youtube video
Please note this is flying indoor using optical flow (Lidar Lite V3 and PX4FLOW)
Integration on a 180 size quadcopter
In order to reflect the compactness of the PocketPilot , I have integrated the prototype into a KingKong 188 (Aliexpress) quadcopter with these components:
4 x Multistar 1704 and DYS20 A ESC (Blheli)
5 Amp UBEC
Micro Flysky PPM receiver
900 Mhz Telemetry radio with Pigtail Spring Antenna
3S Battery 1800 MAh
VL53LX0 TOF RangeFinder
There is no special instructions for the build but you need a good UBEC with a steep voltage rising curve in order to get the PocketBeagle starting becauses of the power/battery management unit.
This is one of the first test on the KingKong, its flying Alt-Hold using the 7$ VlL53L0X TOF RangeFinder
LINUX and SOFTWARE
A special thanks to Mirko Denecke for having adapted the BBBMINI ArduPilot code to the PocketPilot and Robert C Nelson for making the OS Images including: Linux Debian, Kernel with RT patch and the uboot overlays; allowing to define the IO using a configuration file, making the BeagleBone such a powerfull Linux Embedded Computer.
You can read the instructions here: https://github.com/PocketPilot/PocketPilot/blob/master/SoftwareInstructions.md
MORE TO COME:
For anyone interested, we are planning to release a complete sensor cape for the PocketBeagle so stay tuned 
 then I’ll order a PocketBeagle and wait for updates
then I’ll order a PocketBeagle and wait for updates

 any estimate on when it is possible to buy and cost?
any estimate on when it is possible to buy and cost?