Hi,
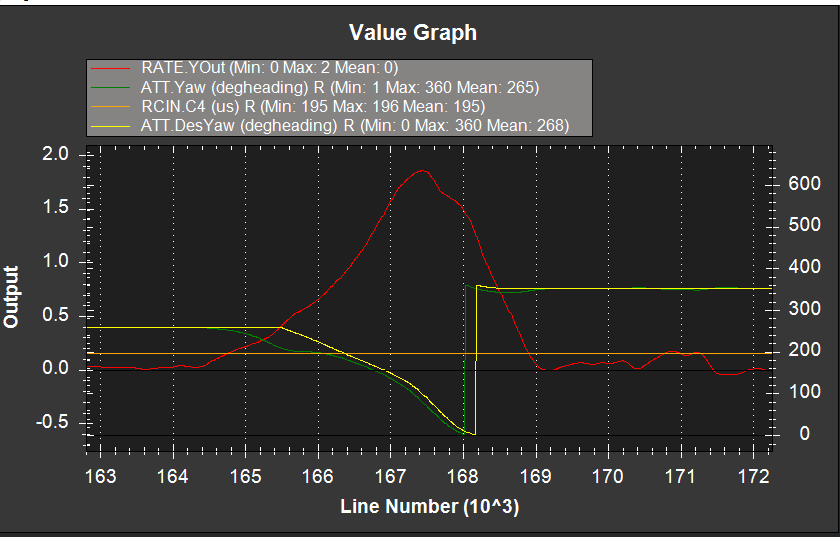
i need help to confirm if i have now a faulty ESC - i got 2rd (rear left) motor to melt previously, for reasons unknown - very odd, so i replaced all motors on the bird. i then ran an autotune, all seems fine EXCEPT that now upon giving max speed, of just forcing drone to go above certain speed i get a consistent yaw rotation (clockwise, i think) happening. it did not do it before, ever.
while in simple mode it still maintains correct sense of the direction - so i presume compass is not really affected and yaw is not mag induced, and the log analyzer agrees - mag interference is 21% or so, not too bad.
Log File C:\Users\putki\AppData\Local\Temp\tmpCD23.tmp.log
Size (kb) 35479.8720703125
No of lines 437970
Duration 0:02:31
Vehicletype ArduCopter
Firmware Version V3.7.0-dev
Firmware Hash 389b3477
Hardware Type
Free Mem 0
Skipped Lines 0
Test: Autotune = UNKNOWN - No ATUN log data
Test: Brownout = GOOD -
Test: Compass = GOOD - mag_field interference within limits (21.78%)
Max mag field length (598.59) > recommended (550.00)
Test: Dupe Log Data = GOOD -
Test: Empty = GOOD -
Test: Event/Failsafe = GOOD -
Test: GPS = GOOD -
Test: IMU Mismatch = NA -
Test: Motor Balance = WARN - Motor channel averages = [1240, 1345, 1241, 1228]
Average motor output = 1263
Difference between min and max motor averages = 117
Test: NaNs = FAIL - Found NaN in POS.RelOriginAlt
Found NaN in CTUN.TAlt
Found NaN in CTUN.DSAlt
Test: OpticalFlow = FAIL - FAIL: no optical flow data
Test: Parameters = FAIL - ‘MAG_ENABLE’ not found
Test: PM = GOOD -
Test: Pitch/Roll = UNKNOWN - ‘BarAlt’
Test: Thrust = GOOD -
Test: VCC = UNKNOWN - No CURR log data
If anybody could find 5-10 min to take a look at this data and may be see something - i would really love to understand what causes that yaw rotation now - i had there in log a pos.hold back and forth movements and a straight up movement in stab mode - that all causes yaw rotation now.
ESC is the Holybro Tekko32 35A 4-in-1 BLHeli32 3-6s ESC, updated to latest blheli32 code,
which is a pity it is went bad on me.
i would really like to confirm that it is indeed the ESC before trying to swap it out. thx!