Your choices in GNSS modules will likely disappoint you. The Neo-M8P in both your base and onboard modules is a poor performer when it comes to RTK. Consider upgrading those anything using a Zed-F9P, UM980, or UM982.
Consider the UM982 or a pair of onboard Zed-F9Ps for a GPS derived heading solution (moving baseline, AKA “GPS for yaw”). Mower blades and high current motors can really throw magnetometer based compasses for a loop.
Consider a better RC system. The FlySky stuff works, but it’s super chintzy. The RadioMaster TX16S and an ExpressLRS receiver work exceedingly well and support a wealth of telemetry (see “Yaapu telemetry script”).
I have no idea what you mean by “manual override” on the RC transmitter. Such an override needs to exist on the autopilot itself, likely via Lua scripting (I can help with that).
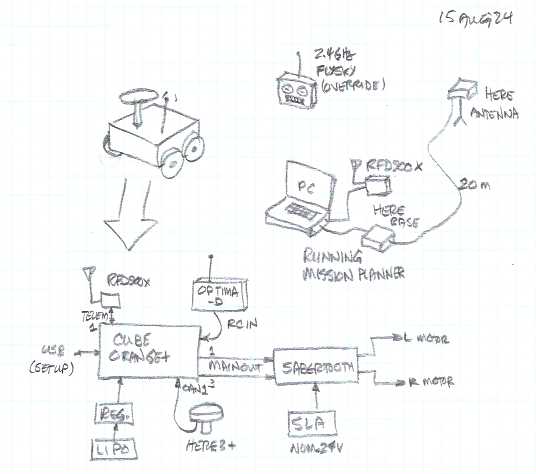
Thank you for the tips, I’ll look into them all. My present system uses two (ancient) RC transmitters: one for manually driving from the garage to the starting points, the other uses synthesized PPM from the PC for following the raster plan for mowing. The hand-held transmitter receiver switches out the PC-driven receiver at the Sabertooth. There are no processors on board. (I built the system 12 years ago, and it’s fully described in my book, “Practical Field Robotics”) I haven’t used any of the ArduPilot software, yet, but I want to start with quality hardware.
Depending on the arming options and failsafes, an override would indeed need to be employed to enable driving indoors. It needn’t be a separate, clunky, additional RC system as described.