8 months have passed. There has been no second attempt to improve the accuracy of the aircraft Loiter. Previous flight logs can be found at the link below.
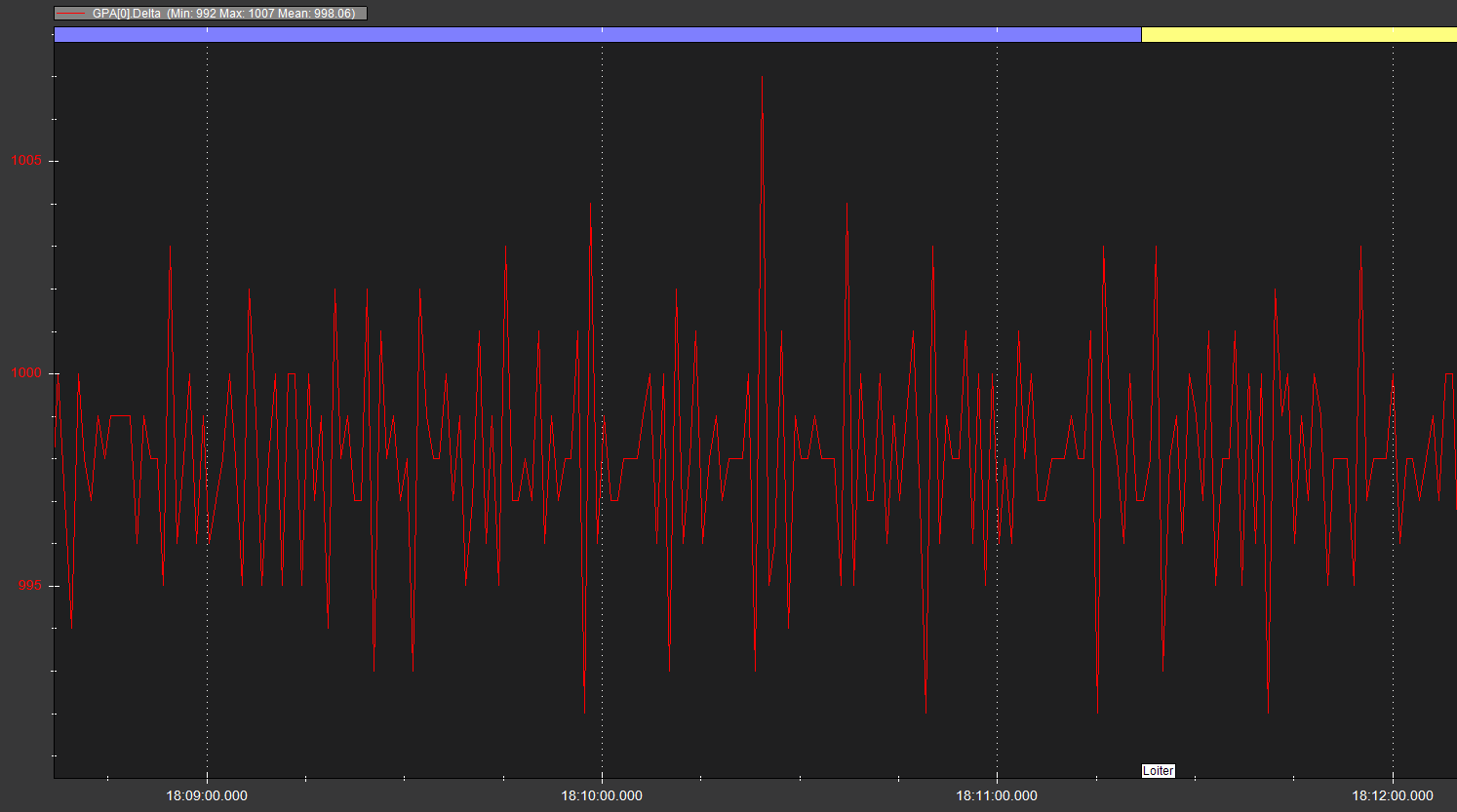
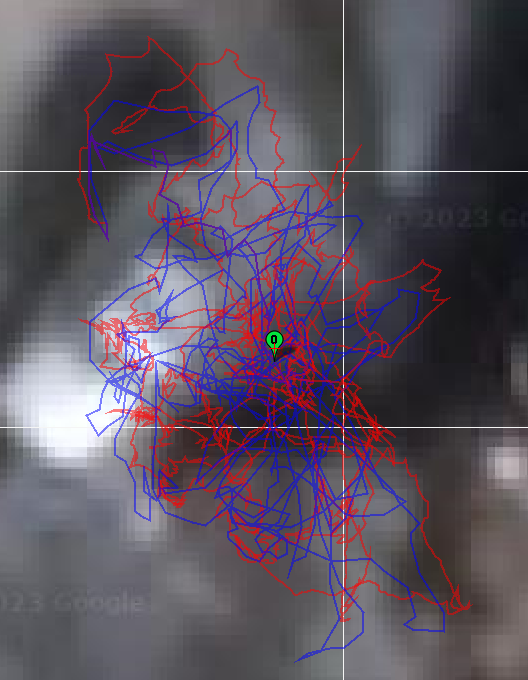
I finally got a new GPS for my quad around spring. Today I attempted to fly two sorties. After replacing the GPS, the HDOP data and the number of satellites of the aircraft have improved to a certain extent. HDOP can be kept below 1 most of the time, and can be kept near 1 most of the time. The number of satellites is more than 10, and most of them will have 11 satellites. But Loiter’s flying status has not been significantly improved, and is still toiletbowls, although there seems to be some small progress. What else can I do to improve stability when playing Loiter? Below is my flight log. Thanks again for your pointers.
Set
GPS_AUTO_CONFIG,1
and change GPS_GNSS_MODE to select just GPS plus one other constellation.
Do not pick SBAS, IMES or QZSS as they wont be working in your region.
The ceramic GPS antenna is always up and slightly tilted back. I’m going to try modifying the GPS settings first. Then if there is no improvement, I will change the GPS position again. Thank you very much for your guidance
I have set GPS_AUTO_CONFIG = 1, selected GPS Galileo and Beidou in GPS_GNSS_MODE. Below is the log of the flight. Loiter seems to be feeling better. But still not very stable. I don’t know if this is already the limit of Ardupolit. By the way, on the day of the test flight, the wind was about level 4.