My quad is in loiter state and has been doing hateful titlebowls. I have followed the instructions in the documentation, by increasing the direct distance between the compass, flight control and ESC, so that the interference is kept below 20% when the throttle is around 60%. But the problem is not solved. The link below is my flight log, the picture is what the quadcopter looks like, can anyone help me and tell me what the problem is? thank you very much.
logs
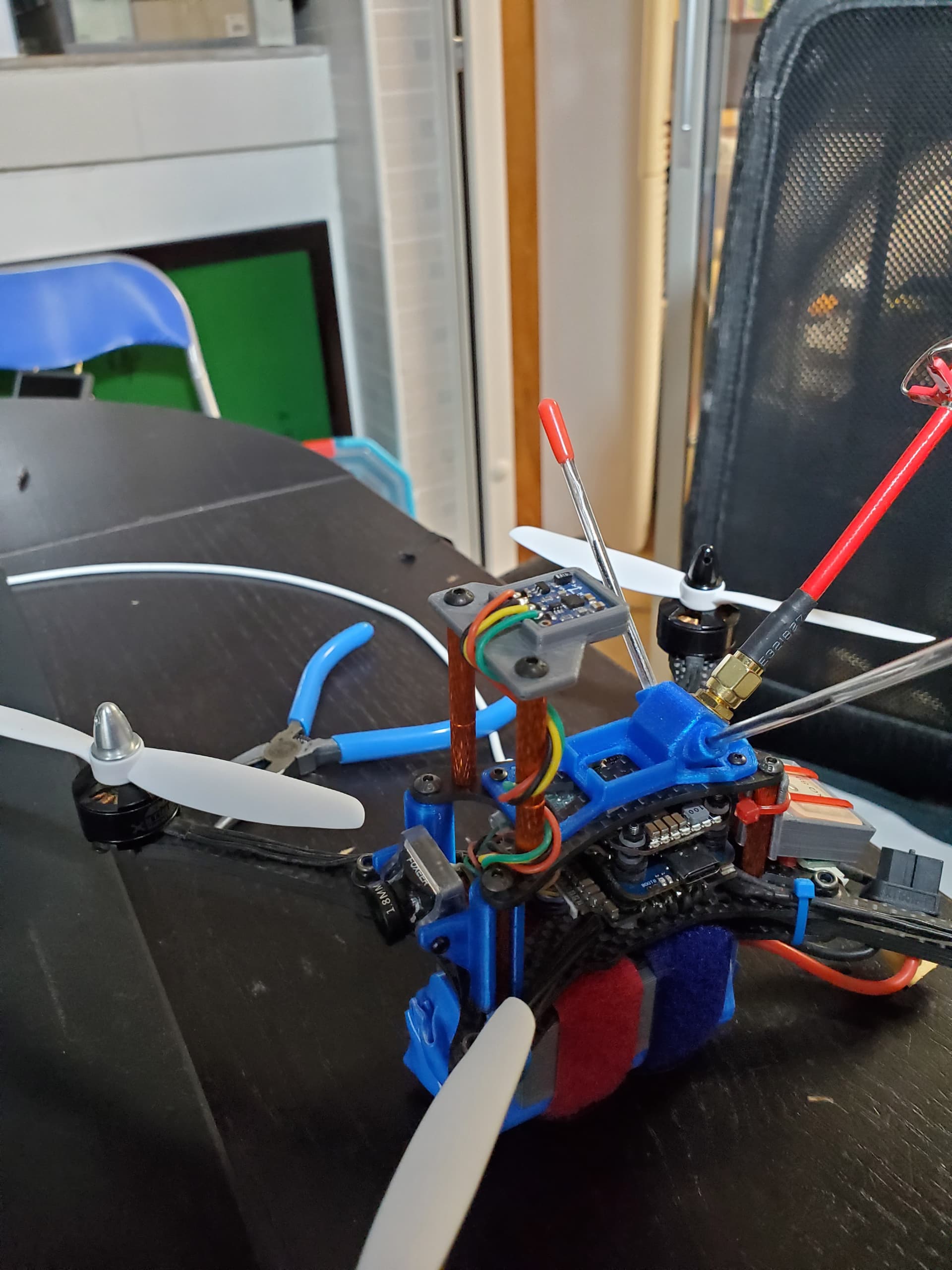
quad picture
You never had more than 7 Sat’s and the 1st Loiter switch attempt failed because of it. Bad positional data. Also, your Vibe levels are high with clipping (100’s). Later in the flight there was a GPS Glitch.
BTW-There is Bdshot firmware for that Flight Controller. You have Dshot configured so potentially could take advantage of motor RPM to drive the Notch Filter. Although your throttle referenced filter seems to be doing a good job.
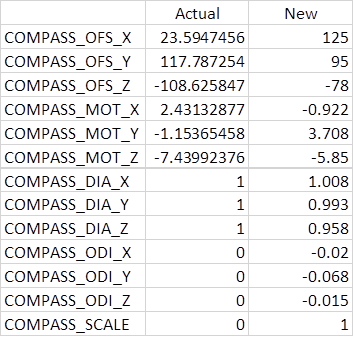
Analysing your compass parameter with mavexplorer (base: inflight data) one can see that your compass parameter could be improved like the table underneath. You may correct them and try again another flight
BR
Harald
Thank you. I will try these new parameter.
I have tried these parameters. But nothing improved. Here’s a video from the ground and the copter.
video from the ground
video from the copter
you still have a pretty high hdop (1.07) and only 8 sats, thats pretty marginal care to share a photo of your setup and what gps you are using. Camera and vtx equipment close to gps can cause some pretty miserable issues which is hard to resolve on these smaller quads. I have had luck covering my vtx and cam wires close to gps/compass in copper foil or much more expensive 3m emi shielding
- In your parameters you have set autorotate for compass. The result is that copter orientation is 8 (roll 180 Deg). Is your compass mounted top down?
- Is your compass mounted flat or in an angle?
BR
Harald
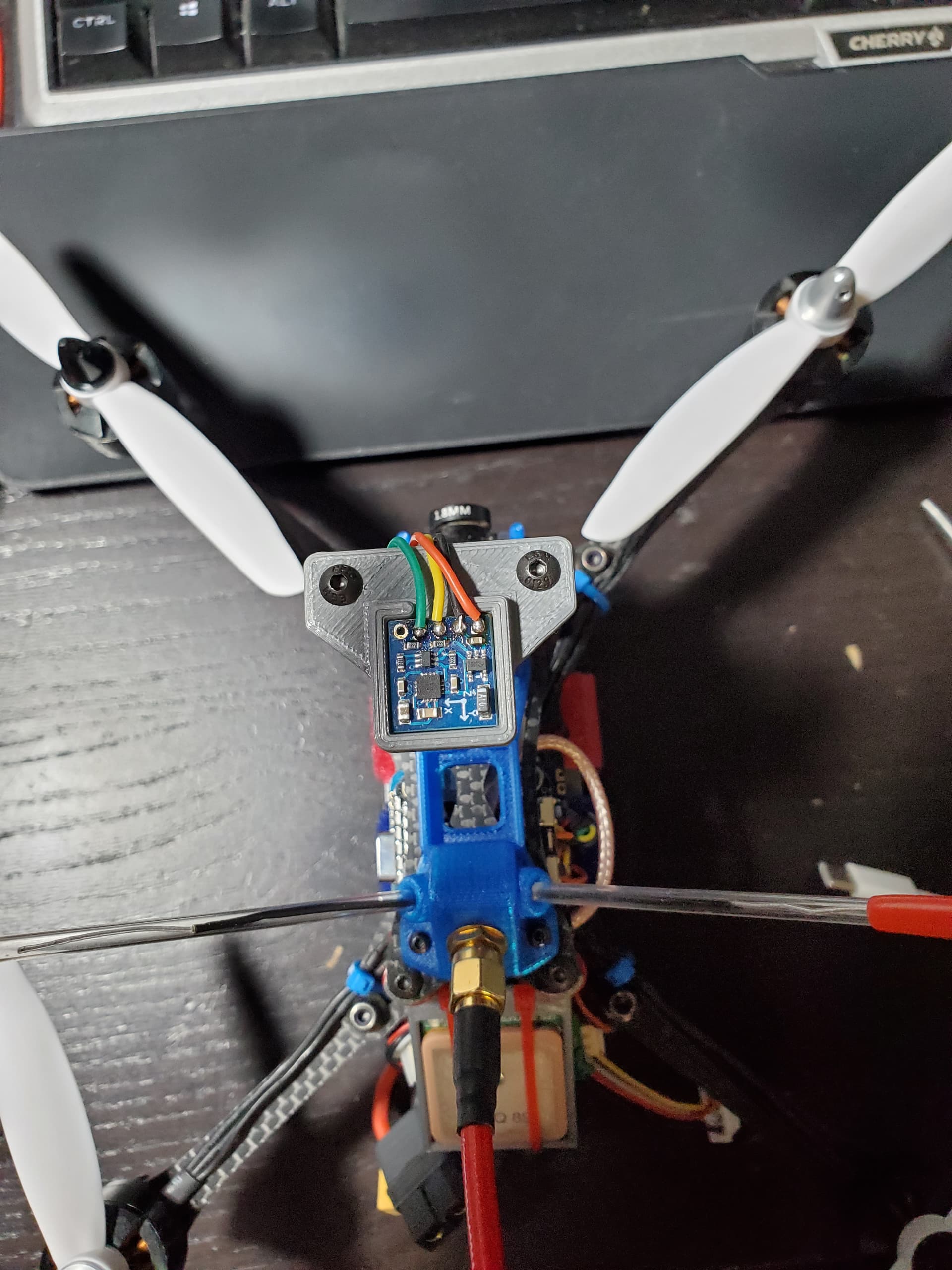

No matter what I set COMPASS_ORIENT to, it will automatically be set to ROLL180 after I complete the onboard mag calibration. The actual installation method of the electronic compass should be clearly seen in the photo above. My Lotier still sucks.
Maybe you could mount the gps in top aswell. You cuold also do a motor compass calibration.
Also, have you set all the initial parameters, set your filters and than tuned the copter. All tht has to be done regardless so that would be a great place to begin.
Edit, sorry, the filters seems fine. At least regarding gyro noise
Also this.
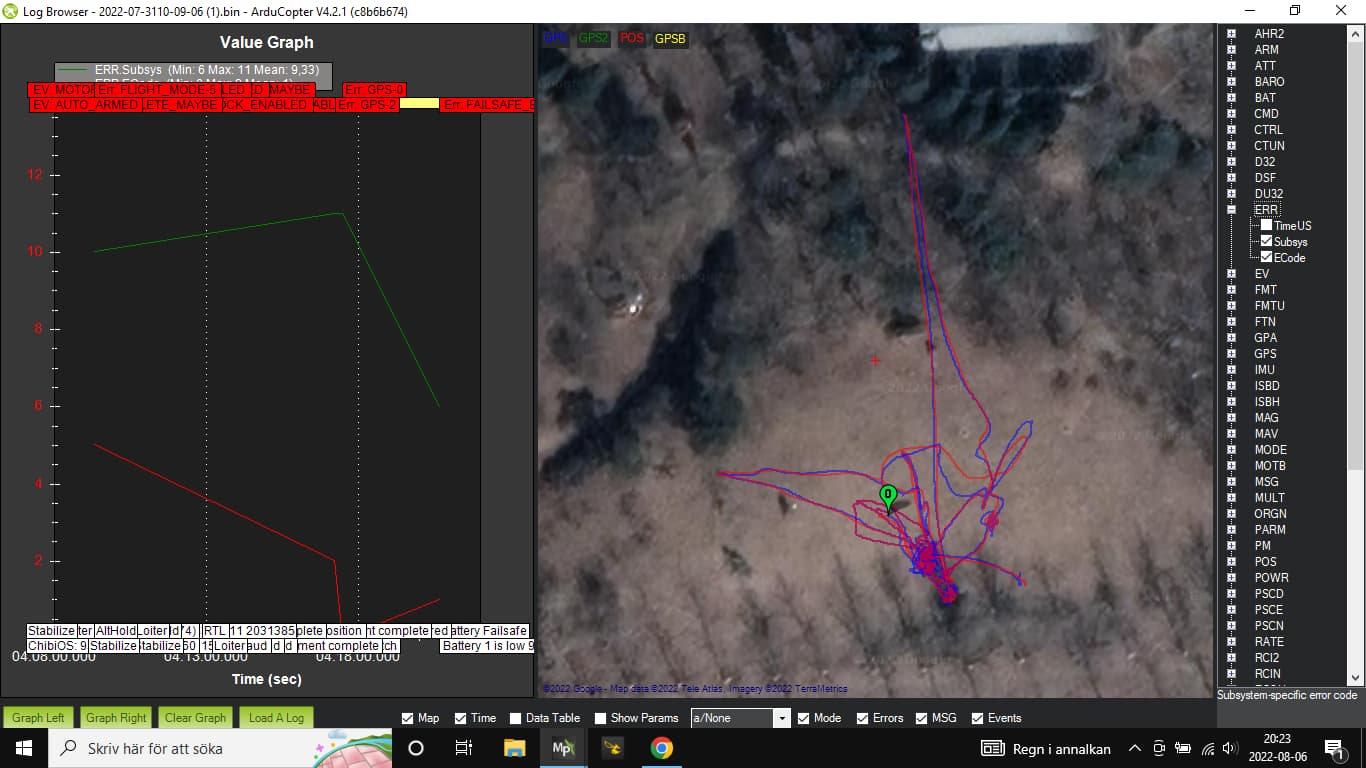
{kind=link}
There seems to be some error codes. I don’t know what thay mean but subsystem 11 is gps I think. Maybe the GPS glitch Dave was talking about
thx, i will try it later.
1 Like