Hi ALL; hope someone can help with this - I’ve done some searches, but couldn’t find any definitive answer/solution.
For a couple of months now, I’ve been almost always getting IMU Mismatch WARN and Motor Balance Mismatch WARN in the log auto-analysis.
The aircraft is a DJI S1000+, with genuine 3DR Pixhawk,AC 3.5.0, MP 1.3.49, with 60+ flights and basically no major issues; I recently changed the gimbal with a heftier one: I then performed a new auto-tune (AGGR 0.07; Roll and Pitch axes “unlocked”, Rate Roll and Pitch Filt 10 Hz). Still getting those warnings; so I customized some parameters (INS_STILL_THRESH 2.75; INS_USE 1; INS_ACC_BODYFIX 1; INS_ACCEL_FILTER 18; ARMING_ACCTHRESH 0.75) and obviously performed new accel and compass cals: still getting the warnings.
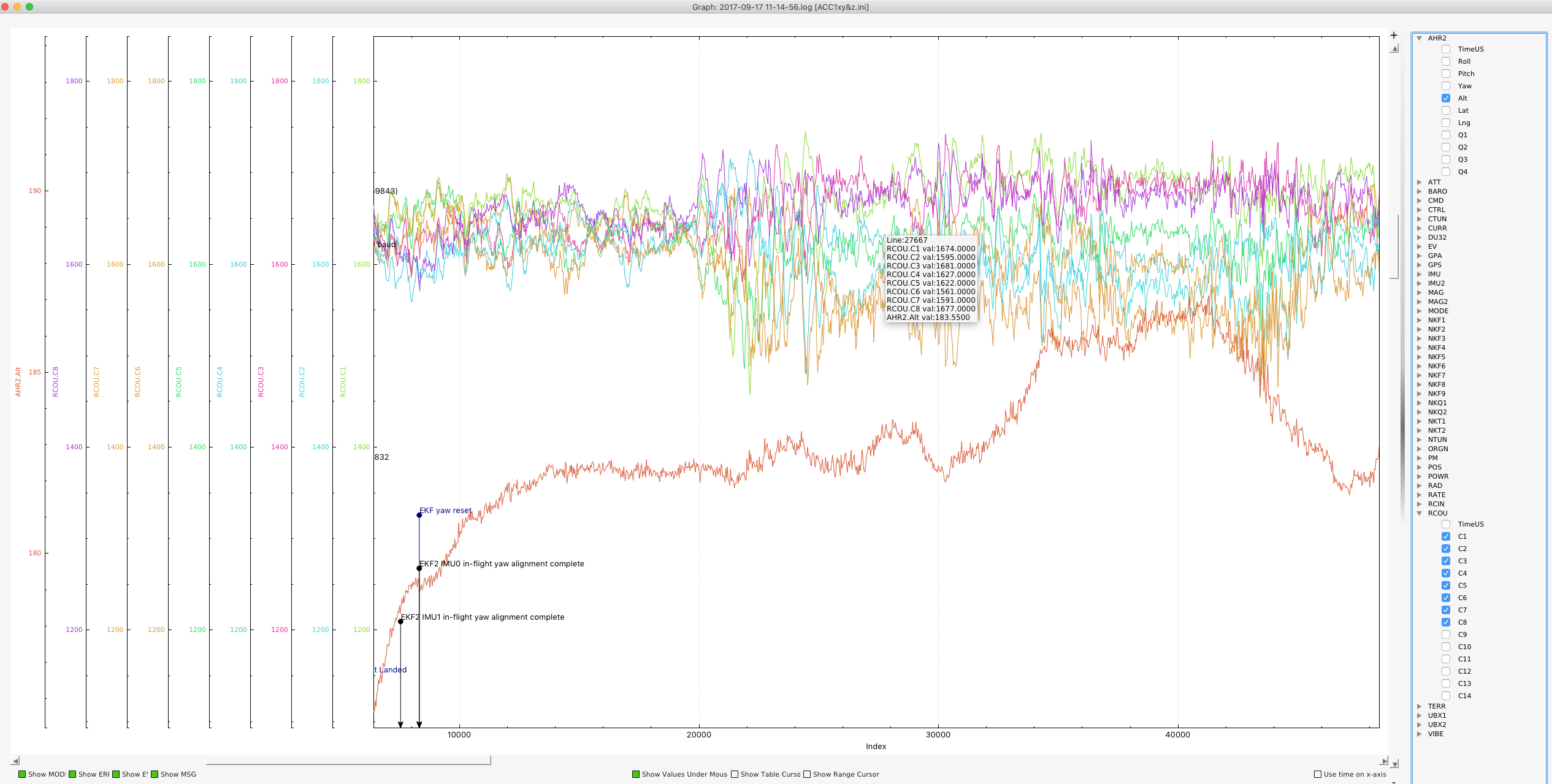
Attached log of today’s flight: for the little I know I examined it, but for the life of me cannot see anything that can hint narrowing down the problem - wind was 10-15 kmh (gusts up to 20 knh), and the drone flew acceptably well (at least to me) and I could not see anything particularly weird or alarming.
I’d appreciate any feedback/input, especially if I can basically ignore the warnings, or if it’s actually something to worry about.
Thanks for any help.
Regards
Giovanni
Looking at the 2 areas you mentioned I see that the motors are not balanced which would be consistent with the wind you said you were flying in.
At takeoff you have a motor bias, but flying the bias changes. Seems consistent with pushing into the breeze.
I would, however, check your copter balance and that all motors are vertical, as you probably have.
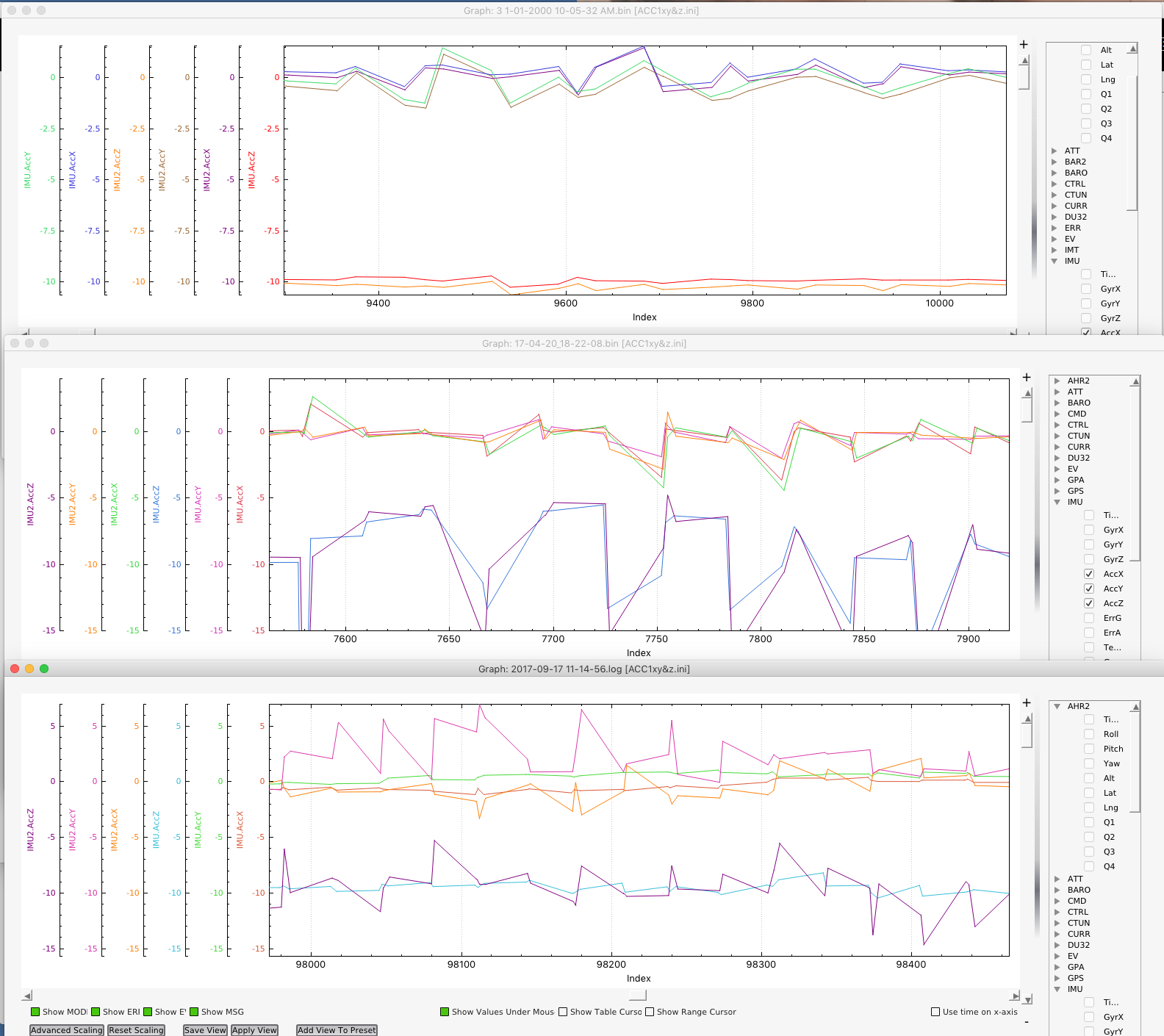
Zooming in and comparing the Acc 1 & 2 to a PH2.1(top) PH1 (middle) and yours (bottom) it seems like IMU2 is picking up a lot more vibration than IMU1.
Hi Mike; thanks for taking the time to look at the logs.
Will check the motors - pretty sure they’re OK, but you never know…also, being not able to calibrate DJI ESCs, perhaps that adds to this behavior: I don’t think it’s dangerous, correct?
As far as IMUs’ inconsistencies, still pulling my hair…perhaps it doesn’t do anything 'cause I’m bald…
Will try to lower the INS_ACCEL_FILTER to 16, do as a stable and strict accel cal as possible…I only hope it isn’t safety critical.
Thanks
Regards
giovanni
Hi; I flew two flight test this morning with some slightly change in INS_ACCEL_FILTER and INS_GYRO_FILTER (lowered to 15 Hz) and some other minor changes - logs here: https://mega.nz/#!4pNmHJIZ!a1LwfgOx2dHMSqJYcNRuhV3-X3rukNYAvE7-fGZ34zk
My “visual and auditory” impressions and piloting feelings seemed good, actually I was rather impressed by the stability and attitude control of the copter…but evidently those were just my subjective snsations…still getting those IMU mismatch and motor balance FAIL…
I know this topic doesn’t not arise lots of interest…posting just in case
Thanks