my newly build mini quad (300mm) did crash (flip) on take off.
I’m wondering whether that is because I tilted all motors 12 degrees forward or because something with the power or the calibration is wrong. Actually my second build did the same thing and I thought it would be wise to use high quality sensors the next time, so I ordered an mRo x2.1 flight controller and GPS.
All my 4 other builds with a weight range between 1.5 and 5 kg did not show this behaviour.
Thx for the reply, I checked the motor and the prop direction at least 5 times. I will check again after the repair, but I’m quite shure that this is not the problem.
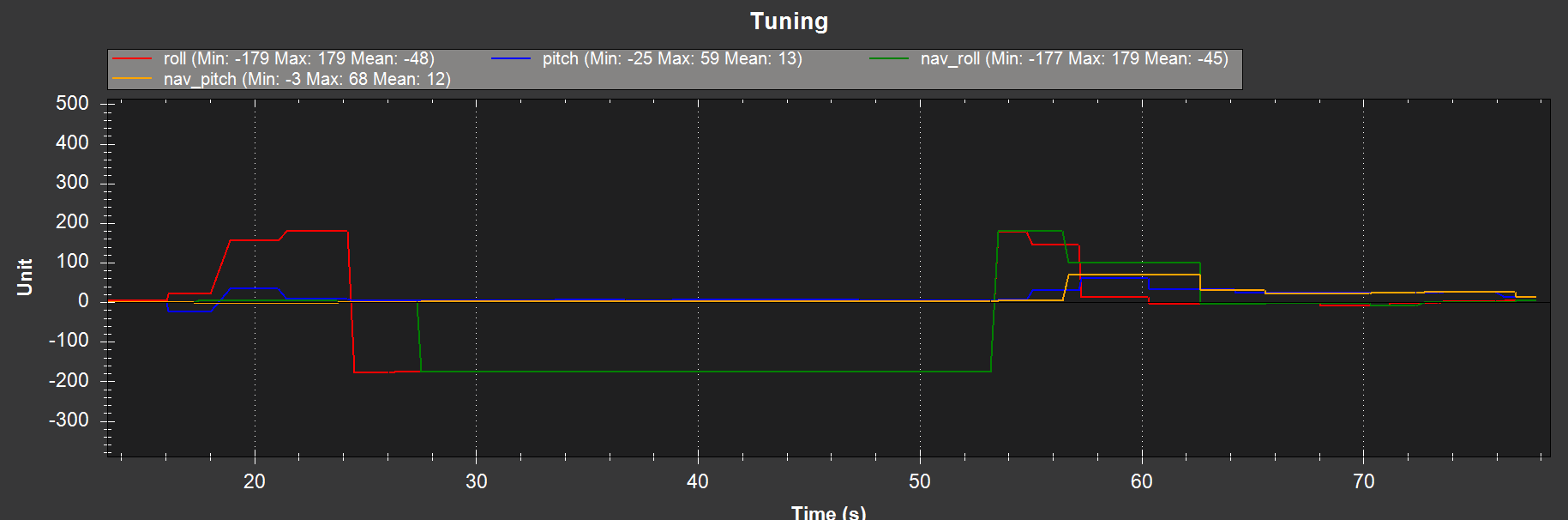
Is this what the motors are comanded to do? Looks somehow strange. The rising of the command for the “green (2)” motor is responding very late after all the other motors already started. Then the strange jump.
Not so stupid me, mRo did not yet update the documentation in an stringent way and there is a lot of contradicting documentation on how to configure arducopter correctly. Since 3.5.x BRD_TYPE = 20 solves most of the problems without any yaw magic. But my compasses are still pointing in the wrong direction.
I have a the same board, you should had notice in Mission Planner HUD the wrong attitude behavior but you are right about documentation. If I remember well it is written to set it as a Pixracer .
The compass has no orientation so COMPASS_ORIENT = 0 , if you have mount the board with the longest side towards front.
Yes, I was in a hurry, so I did not take the time to look closely to the hood (I checked the motors and the props several times bud not the hood, I was somehow confident after reading the docs…), always bad.
I found that I have to set the internal compass without orientation (the borad is mounted as the airplane on the board is printed, so the serial port pins to the front and the PWM and AUX pins to the back) and the I had to set the external compass on the SAM Q GPS module to 180° yaw, even though the arrow of the module is pointing to the front.