Please help. Both drones are built with identical hardware and both have been flown about every 2 days for about a year and then within a week of each other both drones “drop” out of the sky unexpectedly. I the first drone came down hard enough to be a complete loss while the second made a very hard landing. I am determined to figure this out so if there is any information you need to help me with this let me know and i will supply it immediately.
brief flight description:
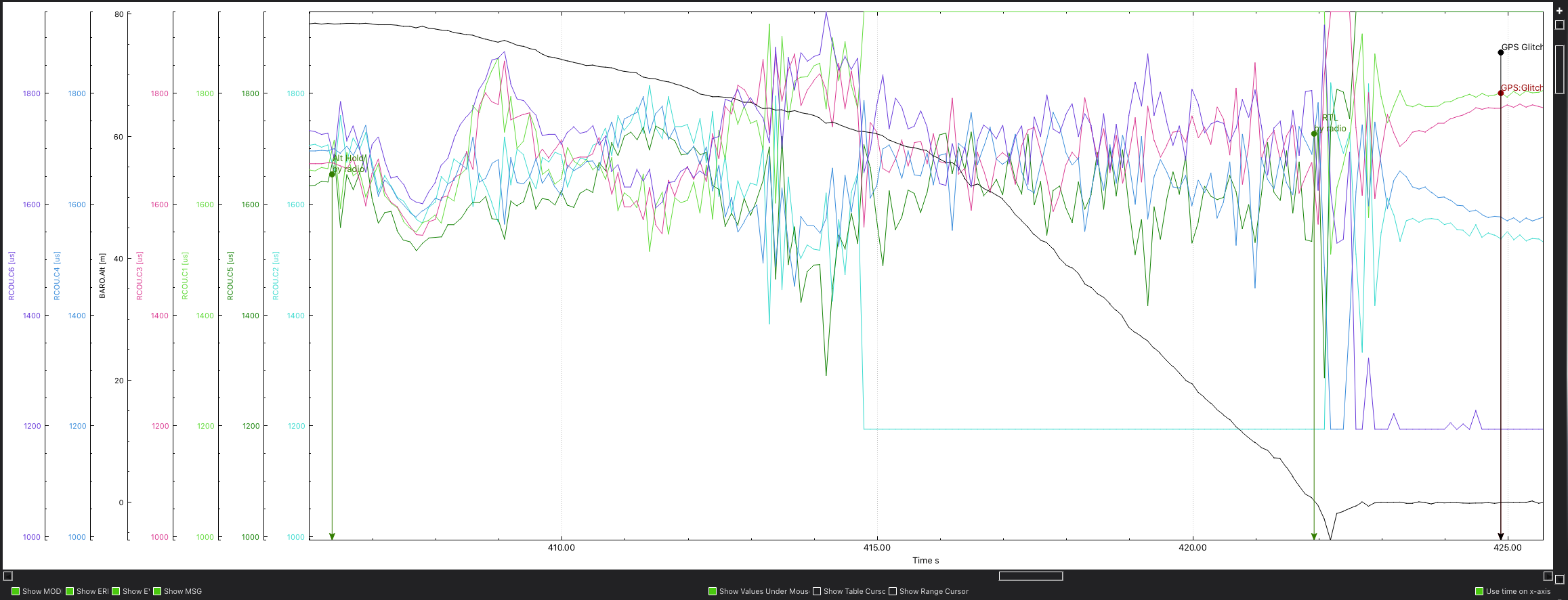
Log 143 - flying in altitude hold mode, hit rtl, once back where we wanted it, flipped back to altitude mode and started to bring it down, noticed it was coming down faster than normal, put throttle back to mid did not slow down, throttled up, did not slow down.
Log 94 - Flying in loiter, increased altitude a few times, and then it just started dropping.
Both flights lasted around 5 minutes and we usually fly this drone for 20 minutes.
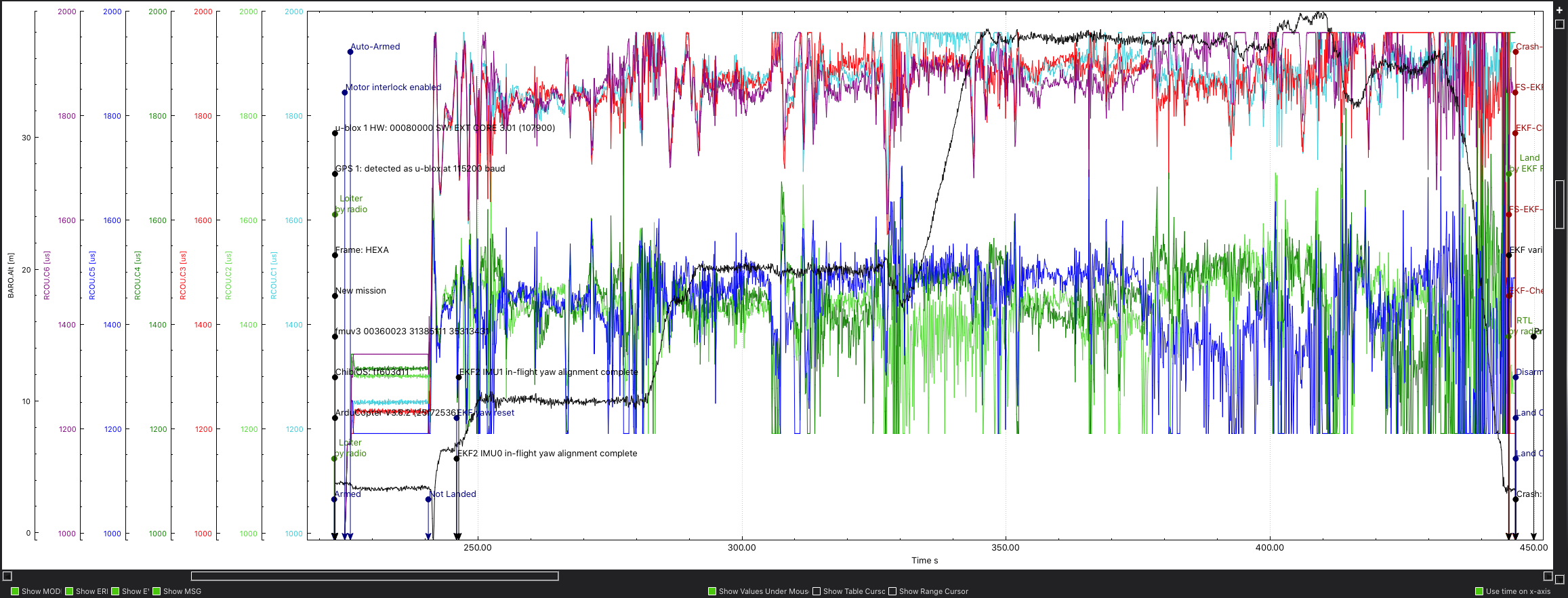
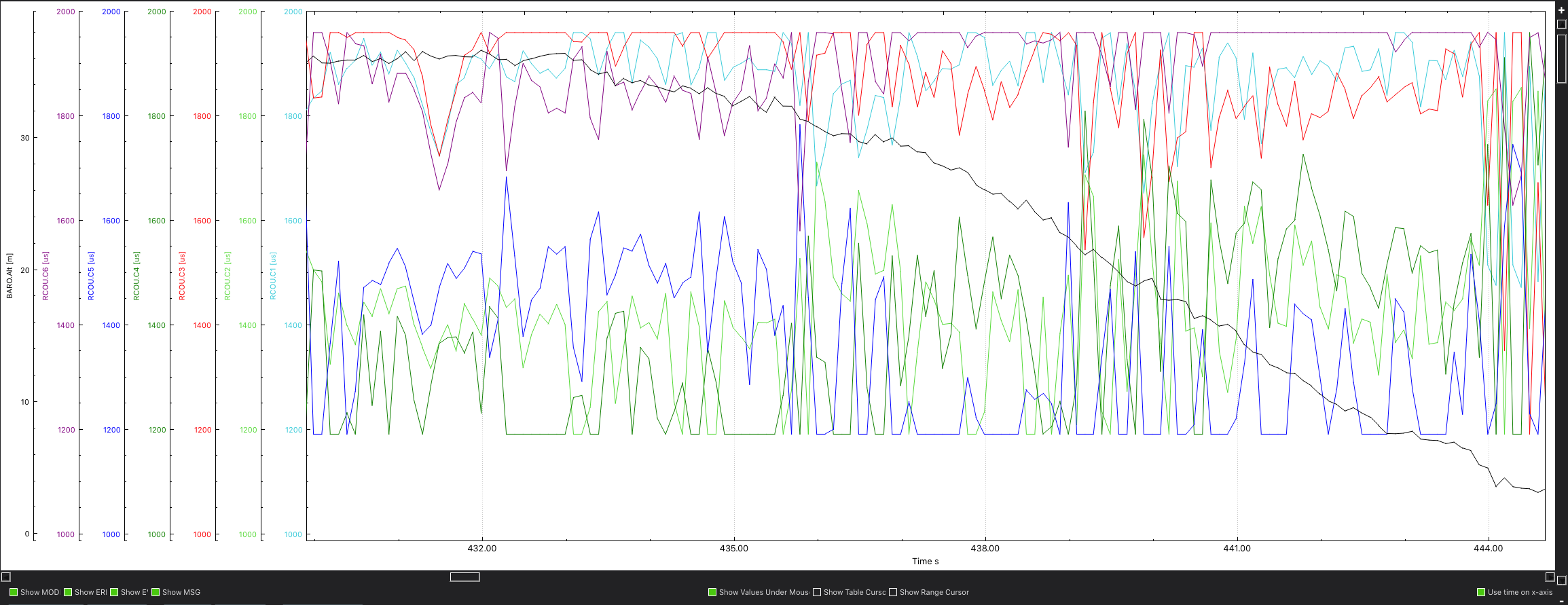
Right from takeoff you have M1 & M3 & M6 running flat out while M2 & M4 & M5 almost shut down.
So there appears to be something seriously wrong with your CW motors.
The situation got progressively worse until it could not hold itself in the air any longer.
Oh my gosh thank you so much… the crazy thing is the drone with the 3 motors running hot has been running like that for the last 7 flights… no idea what changed… looking at the logs we had a flight mid Feb that was fine and a flight immediately following that(landed, swapped batteries and took off) shows the motors running weird just like this one.
These are search and rescue drones that I built so I am not the one doing the flying so I am a little concerned about how this could have happened. Any recommended steps to see where things went wrong from here? If there are no apparent hardware issues could this be a FC issue? Is there any chance that esc calibration could have gotten off? I am not really sure what to look at for getting this back up and flying, Hardware wise everything looks/feels fine.
Also, now looking back at old logs, here is the flight log 1 hour before the flight log where things start going bad and then the flight log where things went started going bad even though it still flew, and then there were 7 flights before it came down.
What is your hardware setup?
What esc’s are you using?
Type and brand of motor and prop?
Frame and construction?
We are getting into hardware variables causing the issue.
I have seen Shot and OneShot ESC’s do strange things.
Some of your settings were close, as are the defaults, but this might help it to fly a bit better. Then do a hover test and some basic flying around in Stabilize and AltHold, post a new log.
Edit:reordered some text.
Let me know if you need these params updated to suit AC 4.0, or you can put them in with AC 3.6 still installed then upgrade to 4.0 and they will get converted as required.
Thank you everyone for the help and suggestions. With everything going on i haven’t had a chance to do much, but today I did have an idea that I was able to quickly try out. I bench tested the drone testing one motor at a time and noticed that once i got past 50% throttle (1500 pwm) the motors didnt spin any faster… So, I did a esc calibration and everything seems to be in working order again. was able to fly and the logs look back to normal.
Now i cant imaging the esc calibration going bad for every motor at the exact same time so I have a theory… my guess… is that the pilot who went out to fly that day turned on the remote and then stuck it back in the case pushing the throttle all the way up. Then he went and turned on the drone, (since the throttle is up, telling autopilot to start esc calibration on next boot) they were probably wondering why they couldn’t arm so they went and turned the drone on and off. The drone is now in esc calibration and since the throttle is spring loaded to center they lowered the throttle to arm(failing), setting the esc min, and then let it go back to center, setting esc max. then they turned the drone off and on again and it “flew”… would any of that make sense with what we are seeing… is that even possible.
Bench testing motors using anything other than Mission Planners Motor Test or ESC configuration software won’t tell you much regardless of what flight mode you are testing in.
My bench test I was using mission planner motor test, once i got above 50% there was no change in the motor output. After that i just stuck the drone in stabilize mode, props off, and slowly throttled up and noticed the same thing, once i got over 50% throttle there seemed to be no change in the motors. After I did the esc calibration, there is now a noticeable change when I throttle over 50%. I went out and flew and it seems ok… my main concern is - is this something that could happened because of a hardware issue or operator error. I can train out the operator error…
OK, sounds good. However implausible your re-calibration scenario seems if that sequence was followed I suppose it could have happened. If you have updated to current Stable and update the basic tuning parameters give it a fly and post that log.