Hi, I’m trying to build Plane that can transit into Tandem Bicopter!
I had studied the former cases such as
According to Peter Hall’s comments I had change the tailsitter code into Tandem Bicopter.
In the videos are the details of the plane and the problems I’m facing now!
here is the parameter & changed program:https://drive.google.com/drive/folders/1SSQdDSglq4siegIWupkRgXnHlJmF3znN?usp=sharing
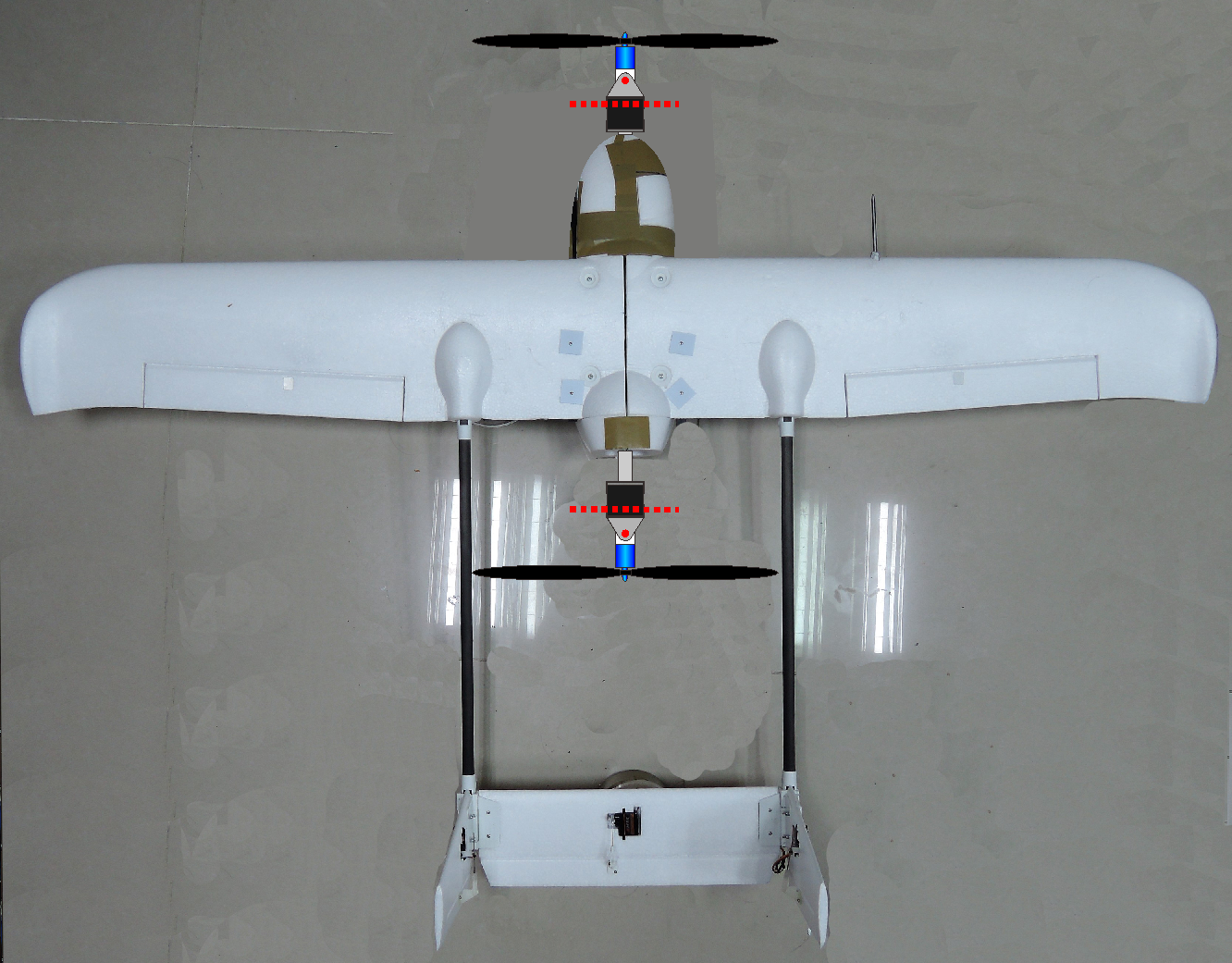
This is how it looks like when its completely build (red are the servos axis):
My process plane:
ERGENT
1 Like
iampete
December 18, 2021, 1:22pm
2
Sorry, AP does don’t support a front + back bicopter. Only left and right.
Hi @iampete , is there another way to achieve front + back bicopter?
iampete
December 18, 2021, 2:25pm
4
You would have to change the mixer here:
/*
This program is free software: you can redistribute it and/or modify
it under the terms of the GNU General Public License as published by
the Free Software Foundation, either version 3 of the License, or
(at your option) any later version.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU General Public License for more details.
You should have received a copy of the GNU General Public License
along with this program. If not, see <http://www.gnu.org/licenses/>.
*/
/*
* AP_MotorsTailsitter.cpp - ArduCopter motors library for tailsitters and bicopters
*
*/
show original
I did. check this
Hi, @iampete I try to force it into QSTABILIZE MODE by setting all flight modes to QSTABILIZE MODE.
here is the parameter & adapted code:https://drive.google.com/drive/folders/1SSQdDSglq4siegIWupkRgXnHlJmF3znN?usp=sharing
iampete
December 19, 2021, 1:15pm
7
Is it now correct in VTOL flight? You might have to change the forward flight code here:
#include "tiltrotor.h"
#include "Plane.h"
#if HAL_QUADPLANE_ENABLED
const AP_Param::GroupInfo Tiltrotor::var_info[] = {
// @Param: ENABLE
// @DisplayName: Enable Tiltrotor functionality
// @Values: 0:Disable, 1:Enable
// @Description: This enables Tiltrotor functionality
// @User: Standard
// @RebootRequired: True
AP_GROUPINFO_FLAGS("ENABLE", 1, Tiltrotor, enable, 0, AP_PARAM_FLAG_ENABLE),
// @Param: MASK
// @DisplayName: Tiltrotor mask
// @Description: This is a bitmask of motors that are tiltable in a tiltrotor (or tiltwing). The mask is in terms of the standard motor order for the frame type.
// @User: Standard
AP_GROUPINFO("MASK", 2, Tiltrotor, tilt_mask, 0),
show original
You might find it works just by setting the tilt type to continuous rather than bicopter.
1 Like
May I ask is it possible to print out which .cpp files are used by adding code: printf(“file name”) or so in order to debug?
iampete
December 23, 2021, 10:42am
9
I don’t really understand the question, see the debugging section on the wiki:
https://ardupilot.org/dev/docs/debugging.html
1 Like
Hi @iampete , 2 questions here
(1) How can I customize the detail of the transition procedure(see graph)?
(2) After days of testing when using “Plane V4.1.6 OFFICIAL” (left-right bicopter)with this parameter https://drive.google.com/drive/folders/1bG8zWdCO1TqdTgAPWLMDZm5HmAt7tra-?usp=sharing somehow the “TiltMotorFrontLeft” always turn about 15 degrees (see video
)before I arm( FLTMODE_CH=5 ) the drone(it does not turn back to vertical after armed). How can I fix these?
Big thanks for your reply!
1 Like
Update here Q_TILT_TYPE:0
Hi Rolf and Dave,
I made a double check. V22 uses cyclic blade to control thrust because it is using engine. We don’t need that with electric motors because electric motor can accelerate and decelerate fast enough. You can check this video
Today I tried to do
On left/right Bicopter with Pixhawk6X + Ardupilot4.2.2
By Q_TILT_MASK=1(only Left Motor is tiltable)
Q_TILT_TYPE=0(this is according to what Peter Hall @iampete told me
Q_TRANSITITION_MS=1(turn off Right Motor imm…







")