Hi Rolf and Dave,
I made a double check. V22 uses cyclic blade to control thrust because it is using engine. We don’t need that with electric motors because electric motor can accelerate and decelerate fast enough. You can check this video
Today I tried to do
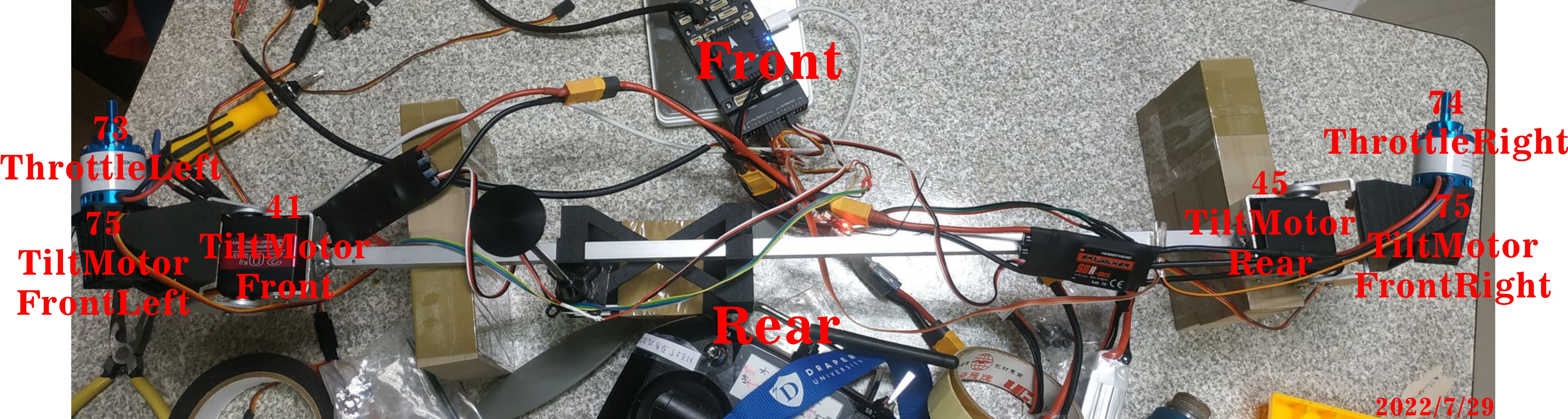
On left/right Bicopter with Pixhawk6X + Ardupilot4.2.2
By Q_TILT_MASK=1(only Left Motor is tiltable)
Q_TILT_TYPE=0(this is according to what Peter Hall @iampete told me
Q_TRANSITITION_MS=1(turn off Right Motor immediately after entered FBWA mode)
But it is not working Please check “Test 3 Q_TILT_MASK:1 Q_TILT_TYPE:0”
Here is the parameter of Test 3
6X_TEST3_bicopter.param (20.3 KB)
I first thought this might be caused by ARSPD_FBW_MIN and Q_ASSIST_SPEED blocking the transition to complete but after the tests below I don’t think that is the reason.
VIDEO of THE TESTS
Test 1 Q_TILT_MASK:3 Q_TILT_TYPE:0

Test 2 Q_TILT_MASK:3 Q_TILT_TYPE:3

Test 3 Q_TILT_MASK:1 Q_TILT_TYPE:0

Test 4 Q_TILT_MASK:1 Q_TILT_TYPE3

I hope someone can help me on this!!!