Arduplane ver. 3.7.1 on Pixhawk 1
Plane: Ritewing DRAK
Description: Auto takeoff with bungee, auto mission at 100m alt - all went well.
Then when switched to RTL at the end of the mission the plane lost height (went down to 50m) but recovered.
Then I took control by switching to FBWA and re-engaged AUTO to re-start the same mission. At that point the plane started diving, triedto take control by switching to FBWA and full pitch up - nothing helped. the plane just dived to the ground.
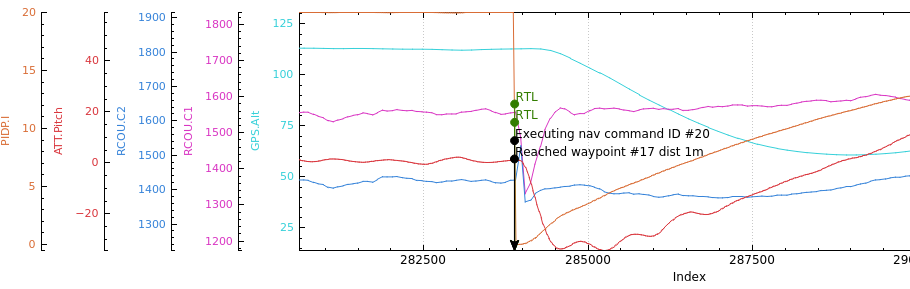
At 535sec, the plane dives sharply from 101m to 50m (50m at 541.5 s) It then climbs almost as sharply back to 100m, reaching 100m at 554 s. (I call this the “1st dive”)
Then it begins to lose altitude more slowly, but it looks like you switch to FBWA mode at 568 sec. You fly it FBWA at about 85m alt for just 4 sec until switching back to AUTO at 572 s. It begins diving (ultimately its final dive-to-crash) around 573.5 s, and looks like despite you trying FBWA for a short bit, and re-trying AUTO for a short bit during that 10sec dive, it must have hit the ground. (I’m calling this the “2nd dive”)
This agrees with your description… so I haven’t contributed anything yet.
Are you wanting to know why it dove 50m and then climbed 50m on going to RTL?
Or why it dove all the way to the ground on the 2nd dive?
Or maybe both?
If someone else can chime in to help at this point, I’m not sure what to investigate further…
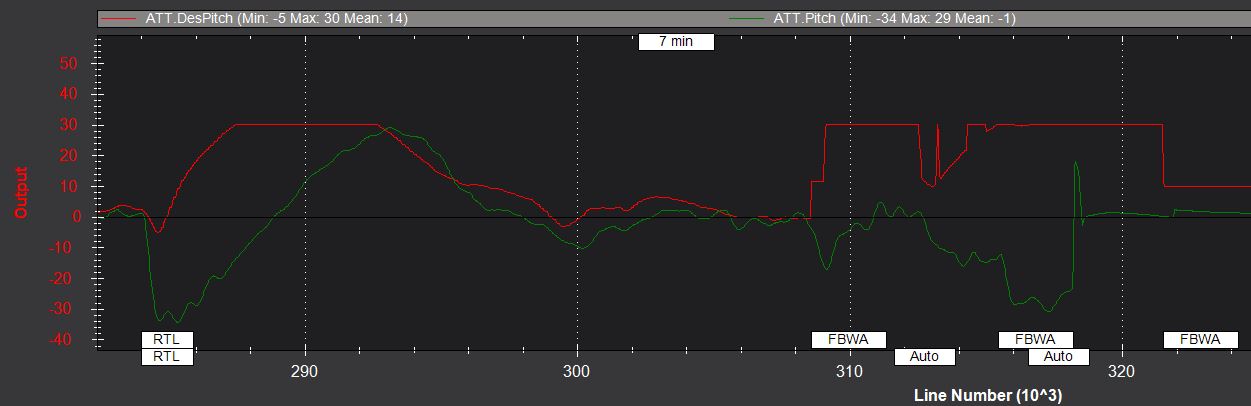
In the image you see both events, the dive from 100m to 50m when RTL activated and the recovery, and then the dive to groud after switching to auto. In the final dive you clearly see that the desired pitch is max while actual pitch remains down.
Don’t know why - it is not a mechanical failure.
This is partially due to integral reset om mode change, an old bug/bad choice. Fixed in 3.8.
But before you think to blame the result on the Integral (as “I” in PID) reset - the real problem here is bad tuning, combined with worse setup. (it’s faster to be blunt)
The plane does NOT fly level on it’s RC1,2.trim parameters, Integral part took care of it, and corrects the big error. If the _trim parameteres were good, you would not see a big change in attitude/altitude on switch.
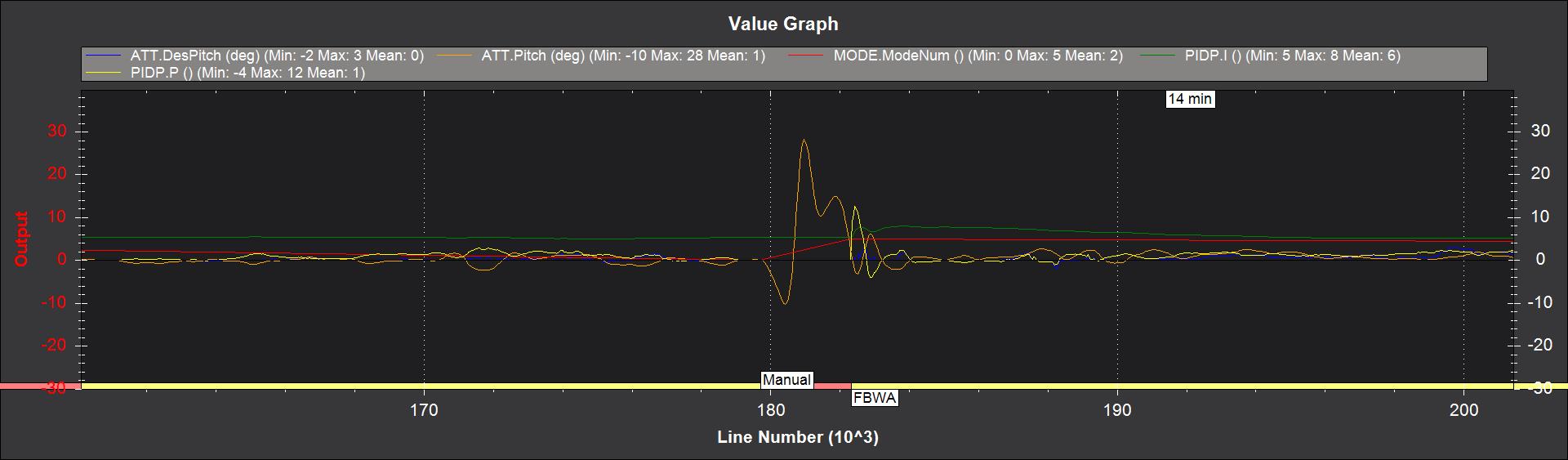
Observe that when “I” is reset (due to mode change) , the plane goes into steep dive as control surfaces are moved, then , “I” , starts to work itself up, slowly… and finally recovers.
You lost altitude this way, then repeated it…
Recovery was possible, and the window for recovery much larger if you switched to manual, or even stabilize mode.
I suspect that a good answer to your question would be another question: Do your plane flies perfectly in manual mode ?
I’m having a similar situation with a new plane, maiden flights were in FBWA mode because of a lot of wind, as soon as I switch to manual the plane almost stalled , I guess COG is not good as well as surfaces trim.
Arduplane works really well so it can “mask” and make flyable a plane with a bad setup .
(a number with answer for each “-”)
1: I refer to trim positions, and the fact that integral maxes out at 20 during level flight to kep it flying.
2: see #1, if Integral is reset, you can see servo moved to more proportional-based position, and cause a nose-dive
3: you could do a level flight in manual, at normal speed, - then see average RC1,2 values in the log for that part of the test only (very easy using APMPlanner2), when on ground, you can then apply elevator till you again see those values (this is a delta, so make sure to have about the same roll as in the air.)
now you will see actual control surface positions during level flight., measure them. (I guess they more more up than you expect ) - release the stick, and set control surfaces mechanically to those positions…
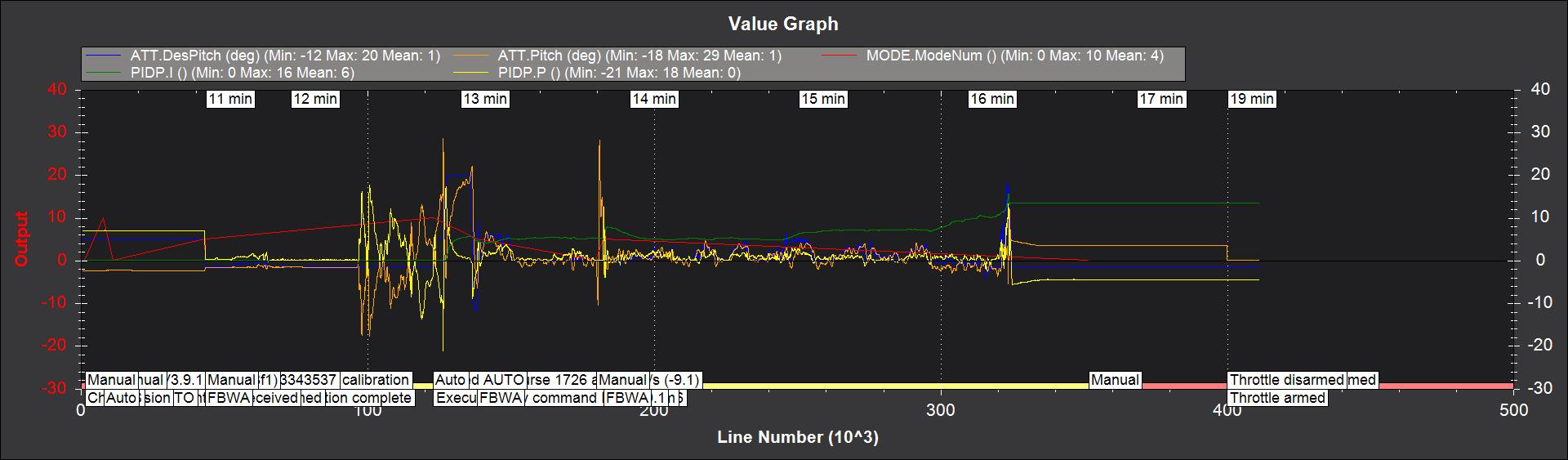
I’m having the same issue, when i switched from FBWA to Manual, it pitched down 10 degrees, then when i pulled up the nose popped up to about 30 degrees nose high and rolled hard right. I was able to switch back to FBWA and it recovered itself, i then landed in FBWA. Could i also be tail heavy? Looks like my PID I is Min 0, Max 16 Mean 6.
MANUAL is a passthrough, there’s no autopilot to help you fly or to compensate for various things like nose/tail heavy. So, in FBWx it was compensating, then you said “I don’t want to use an autopilot anymore” and suddenly all the compensation is gone.
Thanks, yeah I knew that but was just wondering if the PID I numbers indicated if I was tail heavy. I flew it again today, moved CG fwd a little and it was a little better. I was able to trim it out, I also added Expo and reduced servo travel. After that I was able to move CG back to original location and she flies great now in Manual. No craziness when switching between the two. I think it’s still slightly nose heavy, she pulled up a little during my dive test, but I’ll take that over tail heavy any day!
i experienced the same behavior in auto mode the plane dives and switch it back to FBWA and recover the plane and land. i check the pitot i forgot the cover to remove it before flight. that is how stupid i am.