My XUAV Talon that has flown for over 30 hours without issue fell out of the sky when performing a corridor mission. There were no changes to the setup. It had flown properly just an hour earlier. It just nose-dived while taking a turn. Any Ideas?
FIRST: The corridor you are looking at seems to be like 10km long, and it seems to be over a populated area. (Google Satellite shows what looks like farms and houses) Flying outside your ability to see and manually control the aircraft is extremely unsafe. If something goes wrong, you have no way to prevent it from injuring someone.
Please don’t fly in an unsafe manner. People (or things) can get damaged.
I have a few ideas, but I’m not sure what caused the crash. I’m writing a 2nd post right now that I’ll add in a few minutes, explaining what I see and asking for help from others.
One idea I had (so far) is that it ran out of battery. I’m assuming you’re using LiPo batteries. Do you know how low (in volts) you can run your batteries before your propeller/motor slow down?
Here are some things I see:
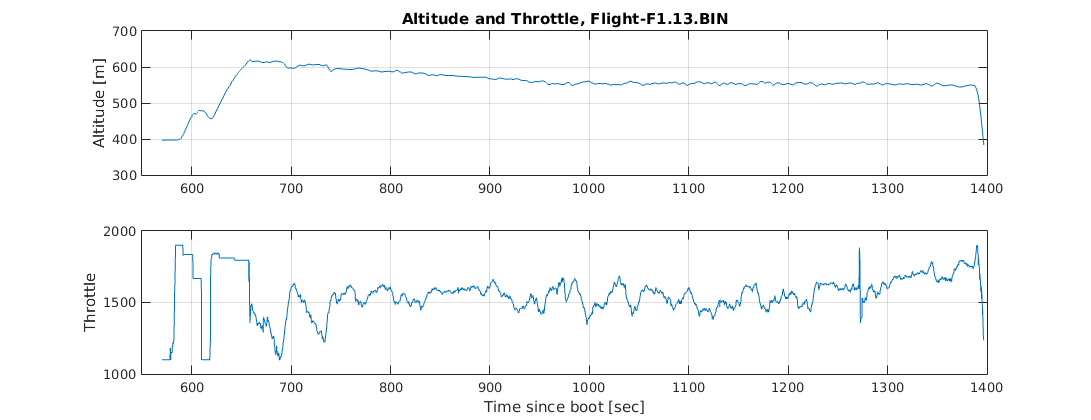
The battery voltage (BAT.Volt) starts around 16.2. This is probably a 4S battery (4 cells, charged to 16.05V per cell) I have attached a plot: the blue is TRUE battery voltage, and the red is an ESTIMATE of what the “resting” battery voltage would be, if the motor were turned off. (This is what we usually use as a measure of the battery’s “charge amount”) I also put an altitude plot so folks can see takeoff and the crash-event timing.
*) An aside: I personally charge batteries to 4.2V per cell, and consider them “empty” at 3.6V per cell. This means a 4S battery is fully-charged at 16.8V, and I plan to land before it hits 14.4V. There is actually no true “lower-limit” but the lower that you run your batteries, the more you risk damaging them. (Some friends of mine run no lower than 3.7V per cell, others run down to 3.4 or 3.3V) If a battery of mine ever reported lower than 3.2V per cell, I would treat it as “possibly damaged” and either discard it, or watch it very carefully for signs of swelling, defective cells, and other dangerous conditions. I would immediately stop using any battery reporting lower than 3V per cell, as the risk of sudden fire and/or planes falling out of the sky is just too high.
Under maximum load (e.g. on takeoff, at 590sec in the log) the battery voltage drops to approx 14.7. Not so bad, as during lower-throttle cruise flight, it returns to something like 15.6. (e.g. at 670sec in log)
As you fly the mission, the battery voltage more-or-less continues to descend. This is to be expected.
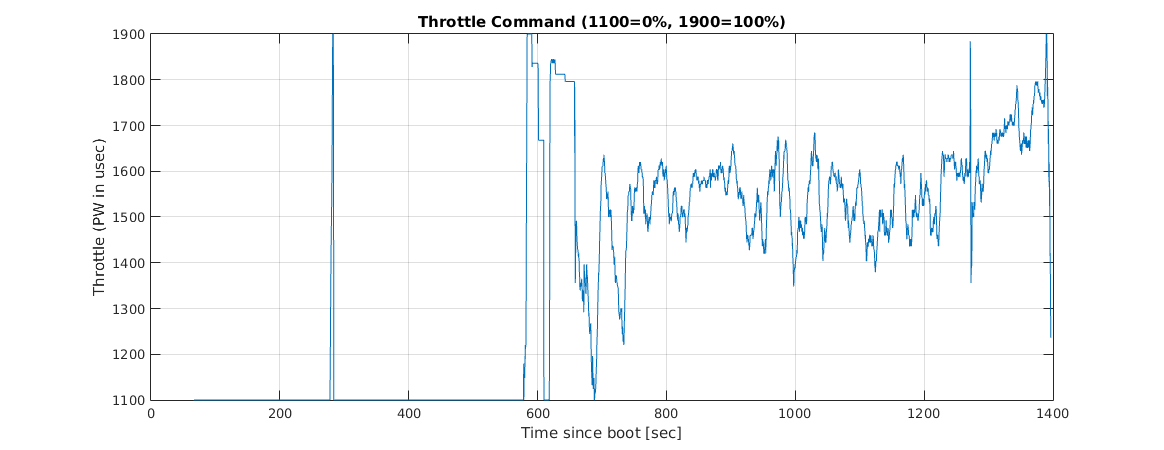
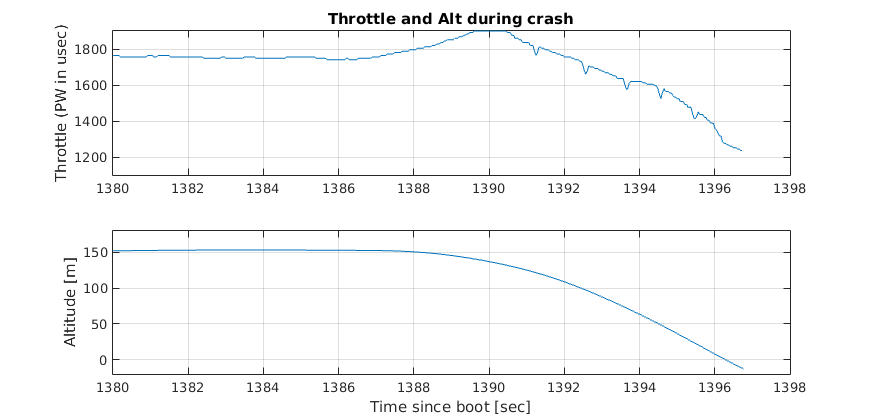
When you are at the far-end of the survey line (Waypoint 40, perhaps?) and attempt to turn around, the plane executes a left-hand turn but descends out of the sky and crashes. However, during this period, Channel 3 of the RC Output (which should be your throttle requested amount) continues to CLIMB to it’s maximum value. This would be consistent with the plane attempting to climb out of the dive, but being unable to do so (because the battery is too weak, thus the plane can’t climb)
I see another strange thing, I don’t understand it.
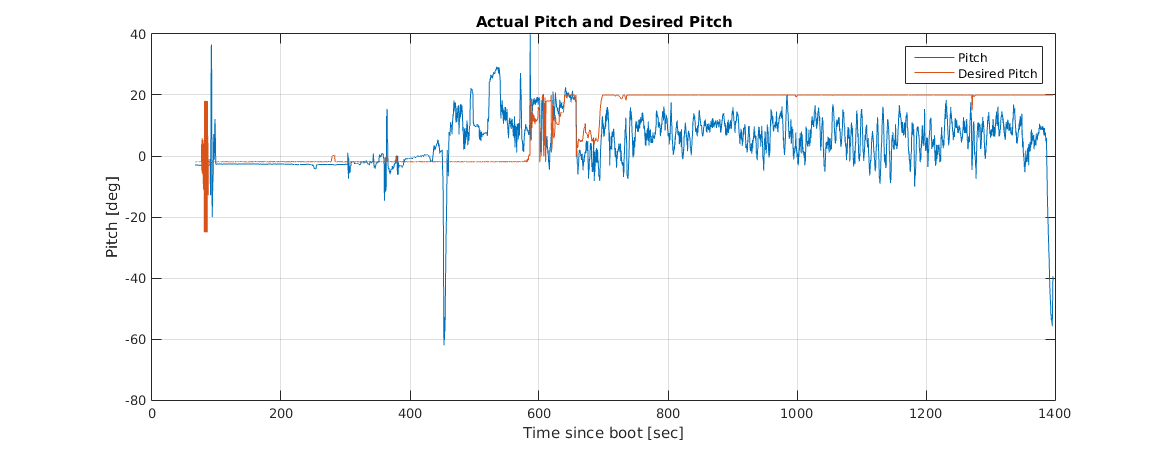
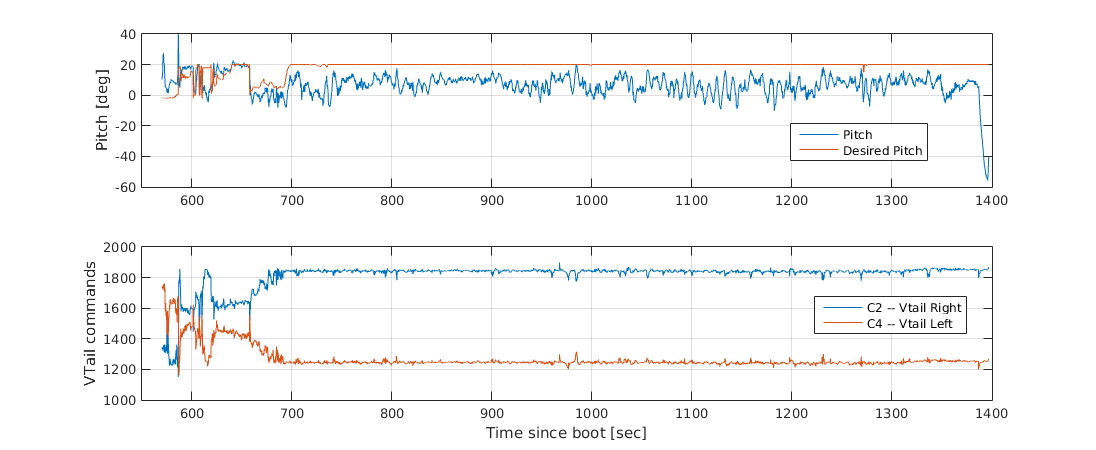
You are using a V-Tail setup, with output channels 2 and 4 controlling the VTAIL surfaces. During flight, your V-Tail surfaces are almost maxed-out for what seems to be “climb”, but your plane consistently has a pitch value LOWER than the desired pitch value. I’m attaching some plots below, which have been trimmed to just the flight-portion of the log. Does anyone understand this?
Piggybacking on Hunt0r’s thoughts here… The true battery voltage actually shoots back UP at the point when altitude begins falling, if I’m reading those graphs right. Pairing that data point with the fact that the battery reached a low point of almost exactly 14v immediately before then, I have an idea as to what happened.
I have a question: what speed control (ESC) are you using, and have you changed its programming it at all? Most ESCs come with a low-voltage cutoff feature that is supposed to prevent damage to your batteries by cutting off power to the motor once you reach below a certain voltage. If yours was set to cut off at 3.5v per cell, then the moment it reached 14v (assuming 4s battery) it would shut down the motor and thus lead to the behavior seen.
The lack sudden lack of amp draw from the motor would be the cause of that voltage spike at the end. The FC would keep trying to add more throttle as airspeed and altitude decreased, but it has no way of knowing that the motor has stopped working. Thus, the plane stalls and crashes.
About that V-tail thing: my first though would be an improper CG. To be more specific, a very noseheavy airplane would require quite a bit of up elevator to maintain level flight. And it’s worth adding that such a condition would only serve to aggravate the stall tendencies if the motor were to shut off.
I have gone lower than 14V several times before landing, and it’s never been an issue. I use a castle 75A ESC. I haven’t changed the defaults in the ESC programming. IIRC, the cutoff is at 3V per cell.
The pitch response seems very interesting. Several older posts show that the pitch integrator maxing out is an indicator of the plane being tail heavy. see here.
This flight also showed signs of the same. the pitch integrator maxed out after flying for a while and it stayed high since. I’m beginning to suspect that it could be a CG issue.
One thing I can’t make sense of is that @WickedShell in the linked post says that the pitch integrator going high is an indication of the plane being tail heavy. But as @lowlyelevated rightly points out, the fact the plane was continually applying UP elevator during flight indicates that it was Nose Heavy. I’m confused
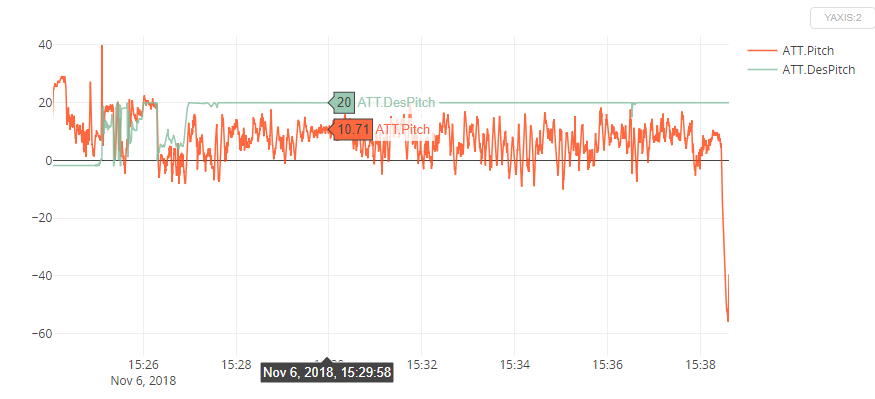
Another idea: Does anyone know why the DesPitch was at a constant +20deg, while the aircraft seemed to successfully track it’s desired altitude? I don’t know the details of how ATT.DesPitch is calculated
The easiest way to tell would be to simply check the CG physically. Most airframes have a user manual that specifies the CG location, or at least an online userbase that knows where it is. Some frames eve n have marks or bumps where the CG is supposed to be. I wouldn’t even bother trying to troubleshoot Arduplane stuff until your plane is setup to fly well in Manual mode. And I suspect that once it does, this up-elevator issue will go away
As far as the battery issue, that is interesting. Could it be that your battery is worn out? Were there any signs of swelling or other damage before the crash?
Nope. the battery was fine, no issues visible. I’m using a Mauch power module, so the current and voltage readings are quite accurate.
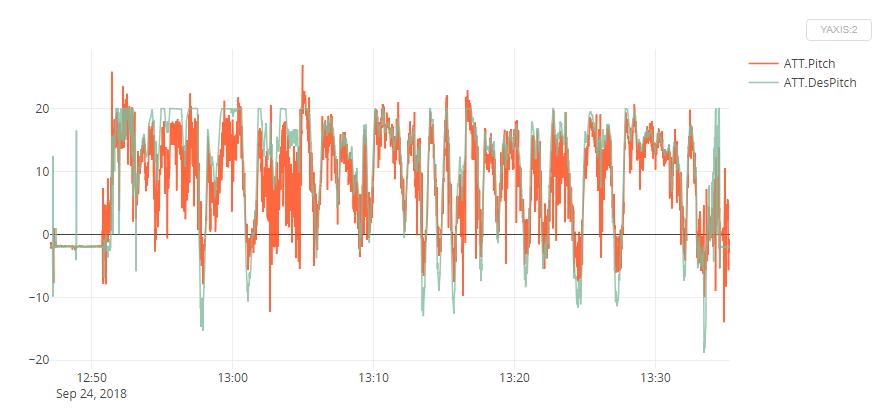
And I had a look at some of the previous flight logs of the same plane. There sometimes was a tendency for similar behavior (i.e. - nose heaviness) that was visible. This was not as high as seen here though -
In the process, I also noticed one more anomaly. -
The CH1 output was not around the trim center,it was applying left Aileron. which implied that there was a natural tendency for the plane to roll right. This was not observed in any of the previous flights however. I don’t know what might have caused this.
So, I suppose that both of these issues caused the plane to enter an unrecoverable stall.