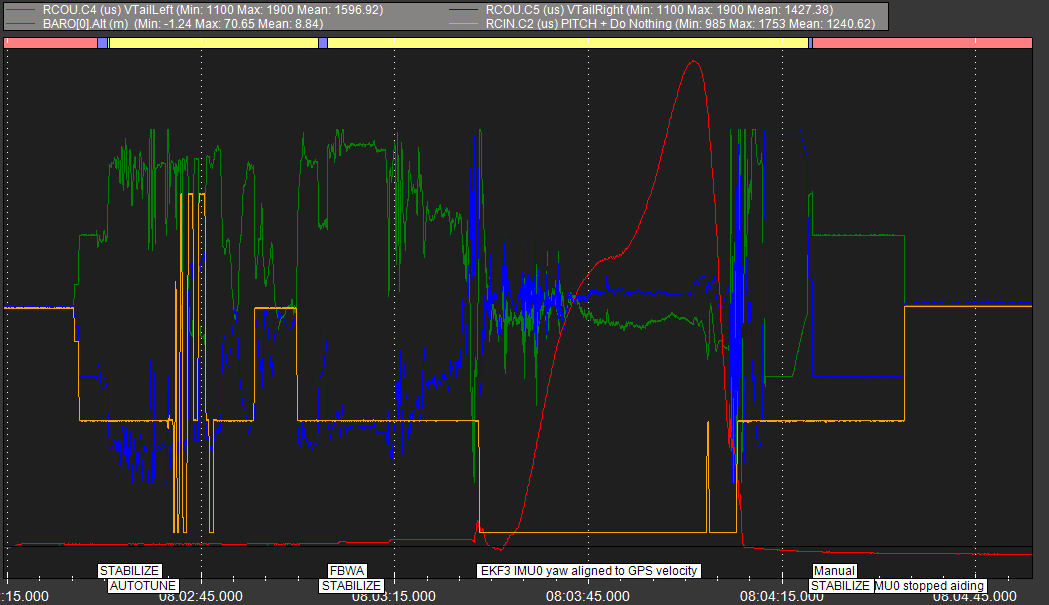
It was my first attempt to switch to Matek. Plane couldn’t gain altitude even on full throttle and crushed. Can somebody decipher the log file, please?
One thing that strikes me as odd is that your RCIN for pitch goes down as altitude goes up. According to Radio Control Calibration — Plane documentation the pitch channel should go up when you want the plane to go up.
What ever happen to doing a maiden in manual first to if it fly’s and cg is good and setting the trims
i see a lot of people doing maidens and except the flight controller to fix there bad setup flying planes
Nop. Not on the transmitter side. If you are using ardupilot/any flight controller. Transmitter should not reversed.
Play around with servo out and check boxes under calibration.
Ones you have achieved right servo direction, switch to FBWA mode and move your model, if model nose down and elevator goes up and if model bangs on left and right aleron move up.
Congratulations, your model has ready to fly.
Pitch / Elevator is normally inverted on the transmitter. When pulling the elevator, the bar in the RC calibration should go up, so provide positive values.
This has nothing to do with the fact that you can configure Ardupilot correctly even with non-inverted pitch, but only so things like the navigation with pitch stick in the OSD parameter menu work properly.
Pre-flight check showed all ok - GC, all control surfaces were moving in correct direction in manual and in STABILIZE modes. My theory now that it was problem with V-Tail mix. Like here: https://www.youtube.com/watch?v=YodyagM8iyk&t=591s
The wiki doesn’t mention setting the mixing gain to 1, it only talks about the need and importance to adjust it but I’ve found that I’ve need to be over at least 0.8 on the v-tails I’ve setup. Setting it at 1 is pretty reasonable.