Tridge,
Kindly refer to my following post for the logs and related video
Greetings @tridge,
I am having a weird problem with one of my MFE Fighters. It has Cube Orange+ running plane-4.4.4. The aircraft sometimes behaves like the airspeed sensor is defective or there is a pitch control issue. The aircraft exceeds set cruise speed and throttle percent varies rapidly in response to the airspeed when this occurs in AUTO mode. The aircraft then struggles to maintain level flight or reach target altitude of the next waypoint. Usually, switching the flight mode from Auto to loiter and letting the aircraft orbit for 2 minutes at the same altitude resolves the issue and I continue mission thereafter for another 1 hour without any problem. I have replaced airspeed sensor and the elevator servos but the issue comes and goes. Switching to loiter for two minutes just after the trasition phase always clears the problem.
I intentionally did not use the loiter today, just to see performance on a ramp as it flies the mission. The issue took another dimension with the aircraft exceeding a waypoint altitude by 40 meters. Thats a lot.
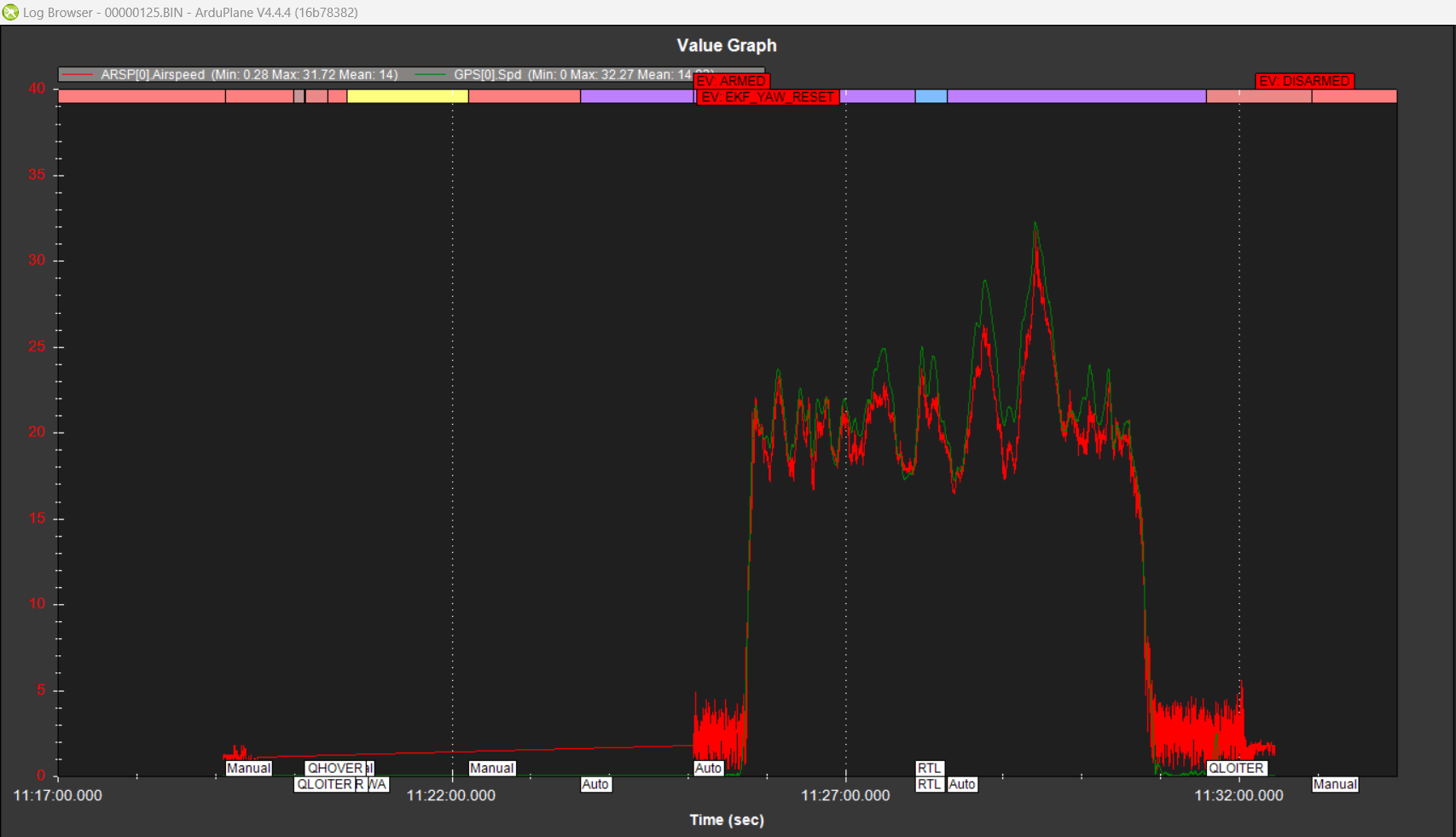
Air vs ground speed. Mission airspeed is 20m/s
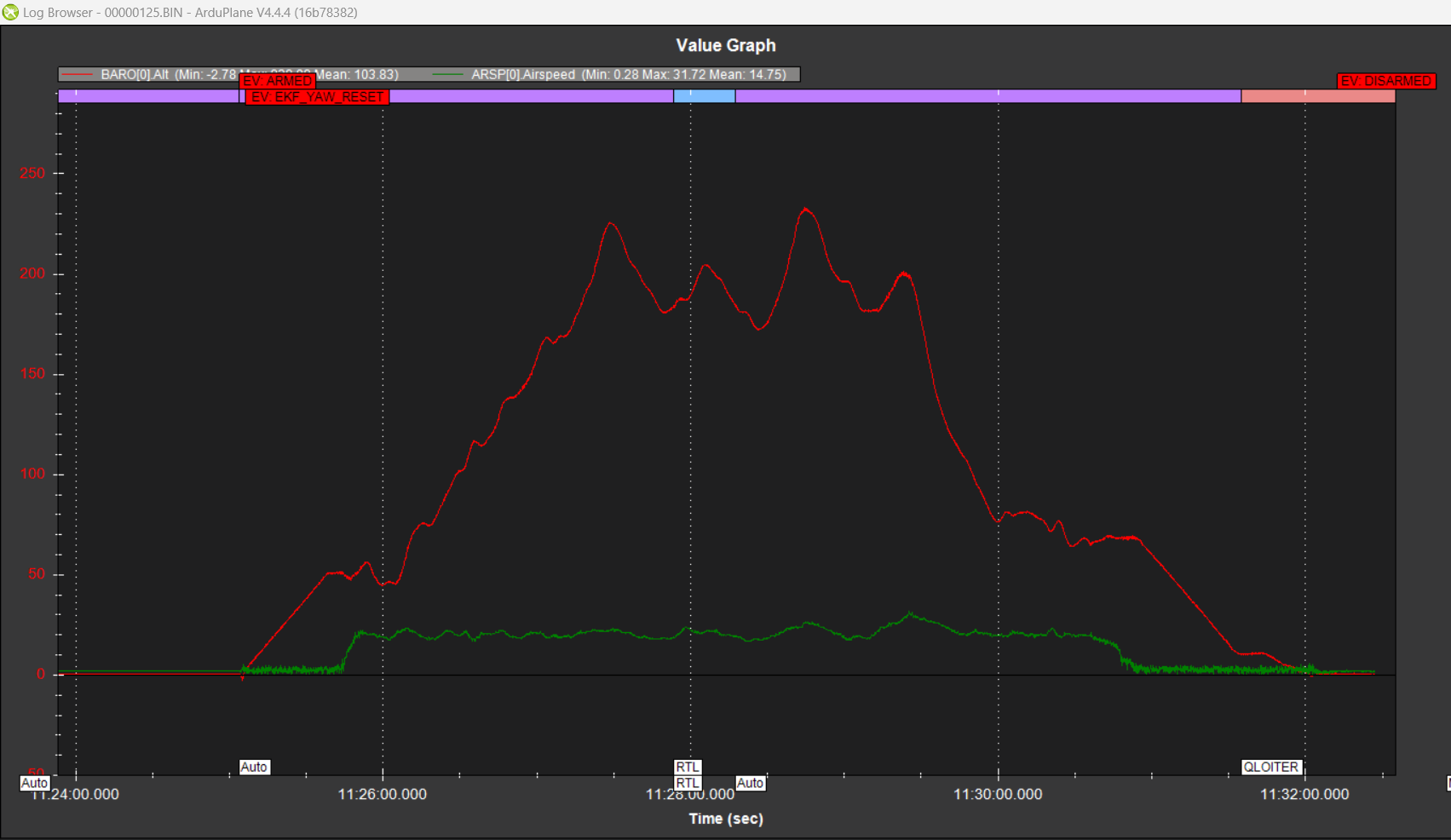
Graph of Altitude vs airspeed
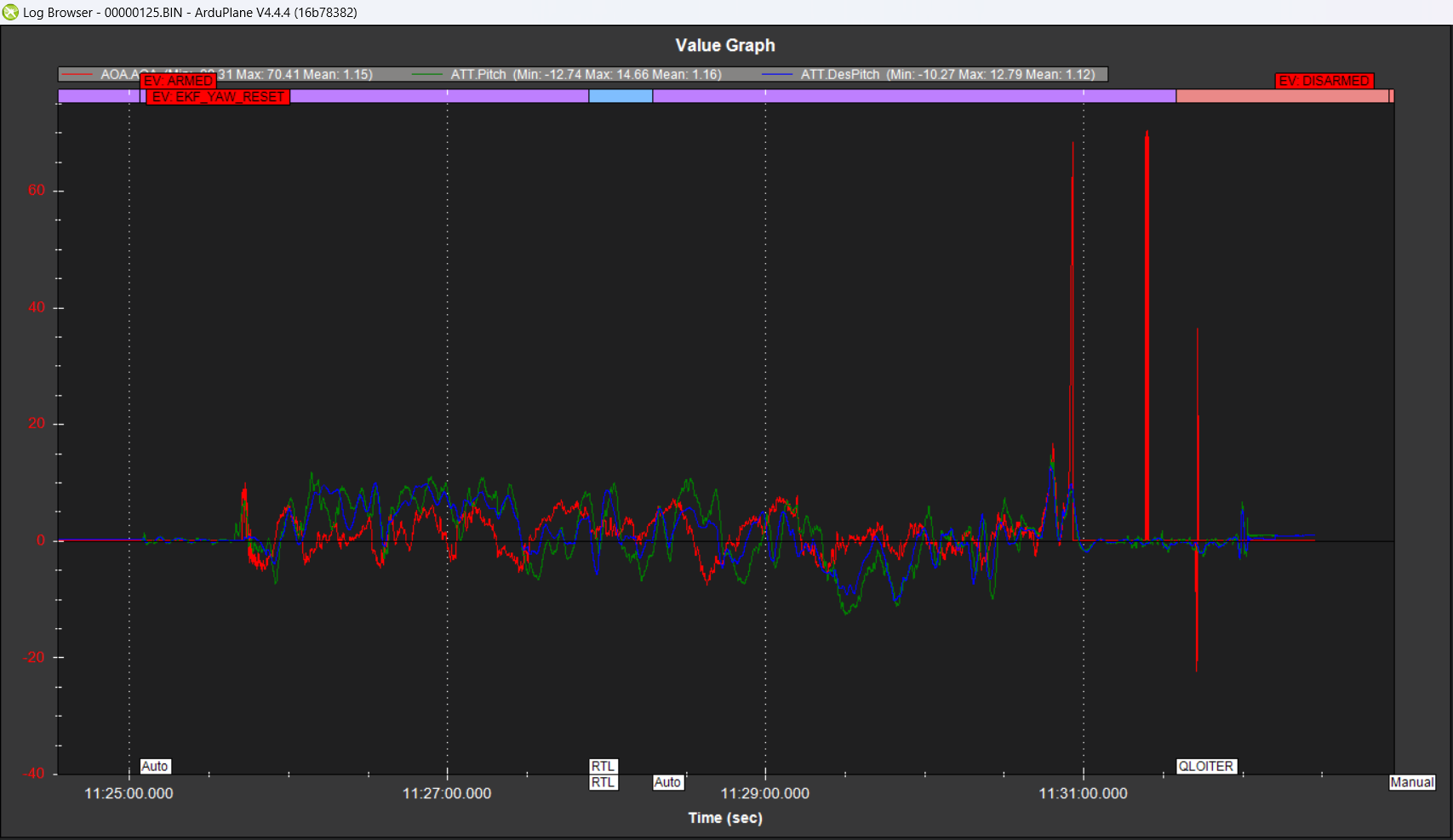
AoA vs Pitch vs Des. Pitch
Link to log file: 00000125.BIN
Please, I need help finding the root cause and fixing it. It has become too risky to operate, so I have grounded the aircraft till I find the root cause.
Thanks for looking into this.
I have just discovered that in the upgrade from v4.3 to v4.4 the TECS.iph and TECS.ith registers have disappeared.
Is this the case?
And if so, what is the procedure for setting TECS_PTCH_FF_K?
Thanks
@sidajili I think your key issues are:
- THR_SLEW_RATE is too low at 10%, use the default of 100. With it set to 10 it means that a change in throttle over full range takes 10 seconds, which is far too long
- your mission has extremely speed descents. For example, from WP 36 to 37 you’re asking for a 120m drop over a distance of 350m. That is more than 1:3 glide slope, which is very steep.
The combination of very slow throttle response with a very steep glide slope is what leads to the overspeed
TECS had a major update. We now have TECS, TEC2 and TEC3 messages.
https://ardupilot.org/plane/docs/logmessages.html#tecs
https://ardupilot.org/plane/docs/logmessages.html#tec2
most aircraft don’t need this, which is why it defaults to 0. It only takes effect when gliding, ie. when using the thermalling feature of ArduPilot
Thank you, Tridge. This was very helpful…well appreciated.
@tridge
Please, when will the stable version support the Remote ID transmitter modules such as Holybro?
Hey, i had a similar problem with my H750 SPRACINGH7EXTREME board.
The thing must have crashed, as there was no further logging past the freezing.

associated log:
@andypiper said this: “The log just stops, so it certainly crashed, Usually if its a watchdog there is another log after that gives the watch dog reason. You are running Plane - I have not tried that, I am not sure whether the low loop rate of plane is something to worry about, you might do better to run at a standard copter loop rate - e.g. 300 or 400 Hz”
Did you ever get it fixed?
Thank you!
Good day everyone…
I need kind assistance from the community to help me determine what went wrong. I have an MFE Fighter that has logged 19 hours in 21 flights. It just flipped on the 22nd VTOL takeoff. This was weird and unexpected.
MFE Fighter VTOL Takeoff Failure (Plane-4.4.4)
00000057.BIN
I am not on site myself to know what happened. I would appreciate help to know what went wrong on this flight. @tridge , please…
Thanks,
Sunday.
your front-right motor did not produce full thrust.
The most likely cause is described here:
https://ardupilot.org/plane/docs/common-esc-issues.html
I suggest you make these changes:
- move the ESCs to the main outputs 5-8 instead of AUX outputs (as main output can be set to 5v signalling)
- set Q_M_SLEW_UP_TIME=0.2 and Q_M_SLEW_DN_TIME=0.2
- set BRD_PWM_VOLT_SEL=1 (this sets the main outputs to 5v signalling)
that will give you a better chance of being reliable with this type of ESC setup.
As always, Thank you so much Tridge. I appreciate your feedback. I will make these changes.
Regards,
Sunday.