Need help analyzing my VTOL plane dataflash logs to pinpoint the cause of crash after having put the vehicle into QRTL mode from QLOITER mode. A few minutes before I had done the same maneuver with successful landing. I am also attaching a video of the crash flight for further help in correlation with the log data.
Link to the data file: https://drive.google.com/file/d/1d96-Ax6cd5FMzLzuGilvLLEpMOLDwbbb/view?usp=drive_link
Link to video: Video from Osman Khan - Google Drive
There are a number of things that make analysis of this log harder than it should be:
- you have no current monitoring. We can use current monitoring to check agains a motor model to confirm motor outages
- you have nearly arming checks disabled
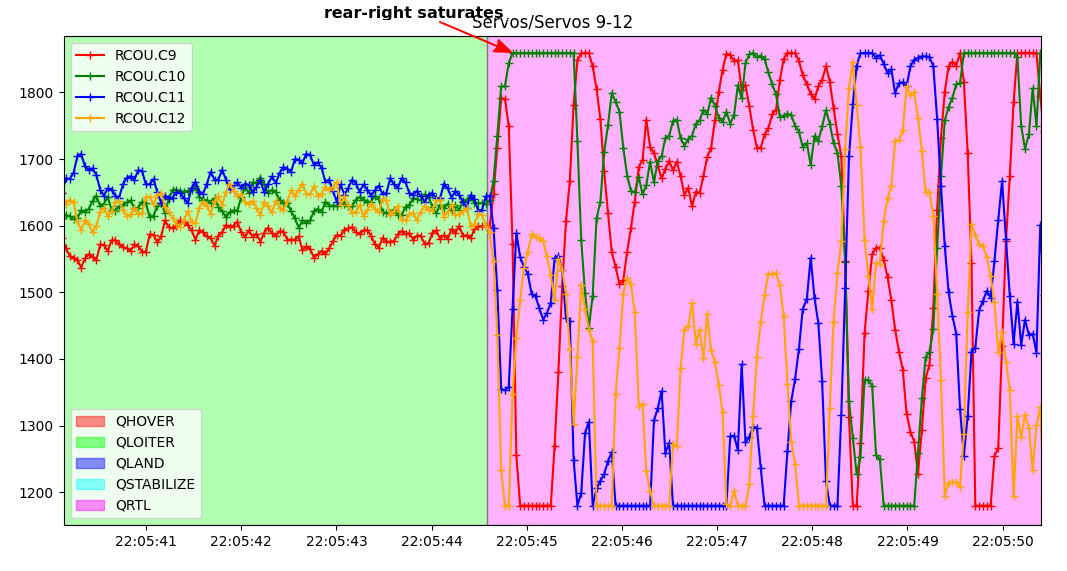
Even so, I can see from the log that you had intermittent failure of the rear right motor. That is clear both from the video and the log.
You should read this document:
https://ardupilot.org/plane/docs/common-esc-grounding.html
and this one:
https://ardupilot.org/plane/docs/common-esc-issues.html
I suspect your failure is from this type of error:

this is caused by high noise on the ESC signal wires causing the ESC to shut down for short periods.
Note that this triggering when you enter QRTL is common for this type of ESC issue. The issue happens most when you have a sudden throttle demand change.
You can possibly work around it by setting Q_M_SLEW_UP_TIME=0.1 to slow down the ESC throttle change, but that will also impact tuning.
Hello Tridge,
Really appreciate your taking time out to review the logs and analyzing the problem. Please bear with me as I am quite a novice in this field and trying to learn as I go along.
Does motor saturation as you indicated on the plot above entail that the throttle to that particular motor is reduced/cut off or that the thrust saturates and fails to further increase as per the FC requirement. Can this be an issue with a bad esc calibration?
Moreover, I need to clarify that the Manual Tuning Roll and Pitch (Step 10) procedure laid out in the Ardupilot quadplane ‘Tuning Process Instructions’ had not been done prior to this flight (only till Step9 of Notch Filtering had been performed).
One more thing you might find relevant. A couple of times on the same day before the last crash flight when I armed and tried to takeoff in Qloiter and Qhover modes the plane became pretty unstable in the pitch axis just as it lifted off the ground as I went past 60% on the throttle stick. I managed to land back immediately without damage in those flights. There was no such issue when I lifted off in QStabalize though, like on the last flight (as you may have seen in the video).
I will certainly go thru your recommended links and the 70% motor test stuttering procedure and give you the feedback. Thank again
1 Like
Hi Tridge,
Just an update. We did the 70% motor test for stuttering many times and it was negative for any stutter.
1 Like