@tridge
I had a similar problem when I was on an autoflight mission.
Write the route, flight mode is AUTO, and the airplane’s ailerons and tail are deflected at an angle.
About the “Camera Gimba” page in the “Initial Setup” tag, after updating the firmware, it appears to be inactivated. I have realized that the related parameters were renamed, so I tried to change the parameters of “pushed” and “Not Pushed” directly, but seems that doesn’t work. My Sony camera works with the initial setup, after the update; but when I try to change the parameter for my ADTI camera, it doesn’t work. With the original firmware version 4.3.4, the change is possible and works perfectly.
@tridge
I found a problem:
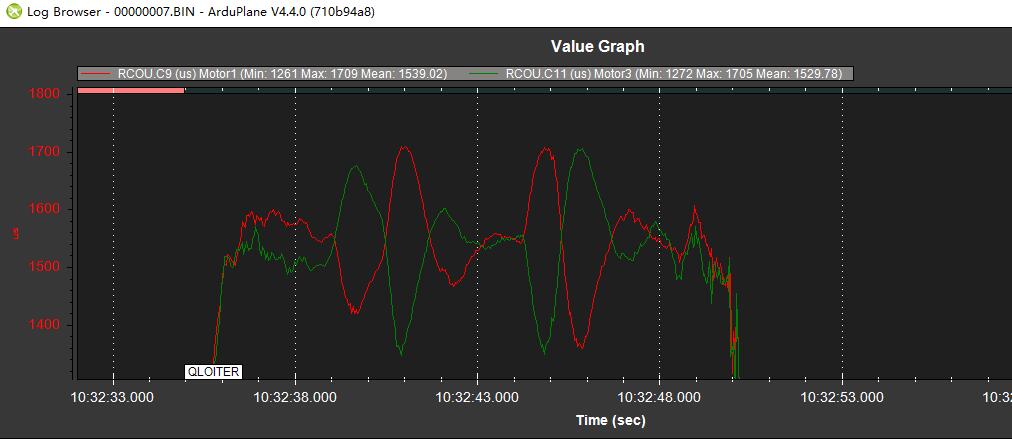
An example: using Quadplane in Q_loiter mode. I move the YAW axis RC stick to the left and then back to the center. The direction of the airplane will turn to the left and then turn back a little to the right, the YAW control is not very precise.
For the X-frame, C9 is the right front motor, C10 is the left rear motor, C11 is the left front motor, and C12 is the right rear motor.
I decreased the Q_A_RAT_YAW_P value , and increased the Q_A_RAT_YAW_D value oscillation reduction, but it is difficult to control the YAW axis direction very precisely. I am experienced in adjusting PID, I suspect it is not a PID problem.
I suspect that it is a side effect of the YAW axis also having the reverse brake on, I can clearly hear the sound of the motor accelerating in the reverse direction, Q_LOIT_BRK_DELAY is set to 0, and I have reduced the Q_LOIT_BRK_ACCEL value, the improvement is not very obvious.
@makeflyeasy please try increasing Q_A_RAT_YAW_FLTE from 2 to 10. I suspect we are getting too much phase lag in the P control gain due to the low FLTE term.
I have been considering changing the VTOL-quicktune to make the FLTE on yaw higher by default. It would be good if you could confirm this helps.
Following up on the hard nose-down to level after a takeoff — this ended up being a behavior asa result of arspd_use set to 0. I’m not too much of a fan of that change in behavior, but nonetheless I don’t believe it to be a regression.
@tridge
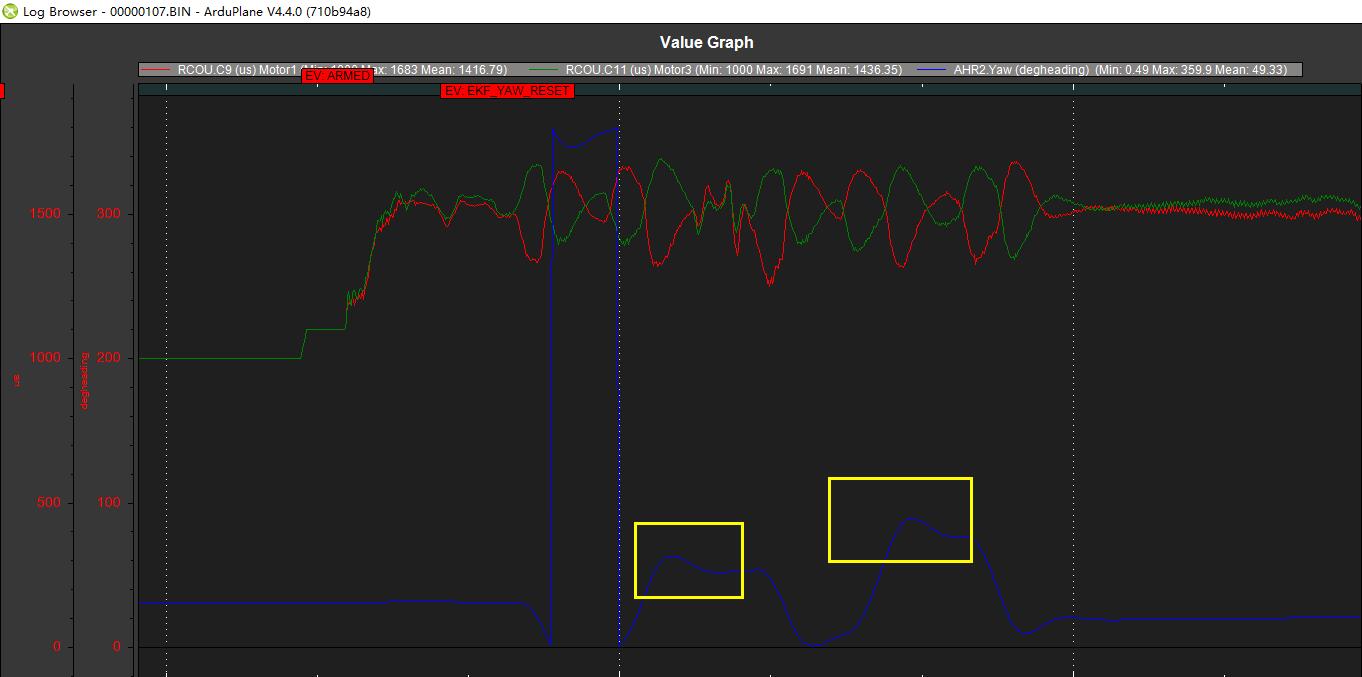
Today I did a flight test Q_A_RAT_YAW_FLTE set to 10 and there was some improvement in the YAW axis, but it was not very noticeable and you could see a tendency for the YAW heading to turn back.
I tried the new VTOL-quicktune.lua on my VTBird TiltRotor. Weather was perfect - zero wind. I got a much better tune on YAW, but I had set Q_AUTOTUNE_AXES = 3 so it should not have tuned yaw, but as you can see from this log it did.
Here is a log from a long QLOITER on a new battery after the quicktune. I’m pretty happy with this, I plan to tune the notch filter a little bit more based on this.
Hi Mr. tridge!
I tested it with some expectation for the SITL parameter fix but unfortunately it remained there. When the V4.4.1 is connected with the xplane, all control surfaces are moved all the way to the end poins and they can’t be moved by the controller. Please fix this problem ASAP.
@RCnorm please tell me exactly what XPlane version and what aircraft you are trying to fly. Then send me your current parameter file. When I get time I’ll test it and see if I can get you going. Setting up an XPlane aircraft properly with ArduPilot can be quite complex.
Hi tridge!
Thank you for your quick responce.
My XPlane is XPLANE 11 and all aircrafts have same problem.
Here I attach a file I played with the Cirrus Vision SF50. X-PLANE.param (22.6 KB)
@RCnorm
HUD says flight mode is RTL. The aircraft is just trying to turn left.
In v4.4 you can change the mode from the joystick connected to X-Plane.
Please check your RC8 input.
Would you check not RC8_OPTION but FLTMODE_CH? Your param file says it’s 8.
Your flight mode can be checked via [SETUP] - [Flight Modes].
Your flight mode should be “1” and RTL should be assigned there.