Yes FLIGHTMODE_CH was 8 and Flight Modes were RTL. I changed Flight Modes to MANUAL but the situation do not change. HUD says MANUAL but all control surfaces moved to their end points when MissinPlanner and Xplane are connected.
I’d like to see your log.
Would you set LOG_DISARMED = 1 and post your .bin log file?
How can I take the log?
I set LOG_DISARMED=1 and played simulation but there is no log data in the log file.
I guess there is some misconnection between MissionPlanner and Xplane.
Because when all control surfaces moved to their end points I can not put pilot override inputs. I believe the pilot override inputs must be functional.
I could take the log. It is here.
2023-09-18 11-55-01.bin (716 KB)
Your RC1 input PWM = 650 & SERVO1 output PWM = 1100.
It appears that your joystick data is not being output from X-Plane.
Check that “Network via UDP” is checked in index 136 “Joystick raw axis deflections” in X-Plane’s [Data Output] settings.
I checked the “Joystick raw axis deflections” is checked. There is no mistake.
I have a question. Does your Xplane work well? Don’t you have this issue in your SITL simulation?
I guess the mapping between joystick and RCn is wrong.
I heared that a file named JASON is required to connect Xplane 11 and ArduPlane 4.4.1 but there is no explanation in the plane manual.
Could you teach me how I can use it?
Realflight. Yaw response on VTOL shows sloppy overshoot in YAW. VTOL-quicktune unable to fix. along with manual tuning.
In this video you can see the overshoot. https://drive.google.com/file/d/11L_QeVe8I6B1UIU1DANRwWyT-gt5kFXl/view?usp=sharing
QuadPlane 4.4.1 beta 2. Lost GPS while hovering in QStabilize. Got “No GPS” message on Yaapu, although I don’t see a message in the log, (although there is an EKF Yaw Reset and GPS.NSats and GPS.HDOP dropped to zero), then the plane tried to do a 360 degree roll and hit the ground.
I don’t know what happened to the GPS, but the reaction seems a bit extreme, considering this was not a flight mode that even used the GPS. Here’s the log (crash at the very end):
Here’s a slo-mo video of the crash

I don’t think it was the loss of GPS that causes the rollover. You had a severe power problem:
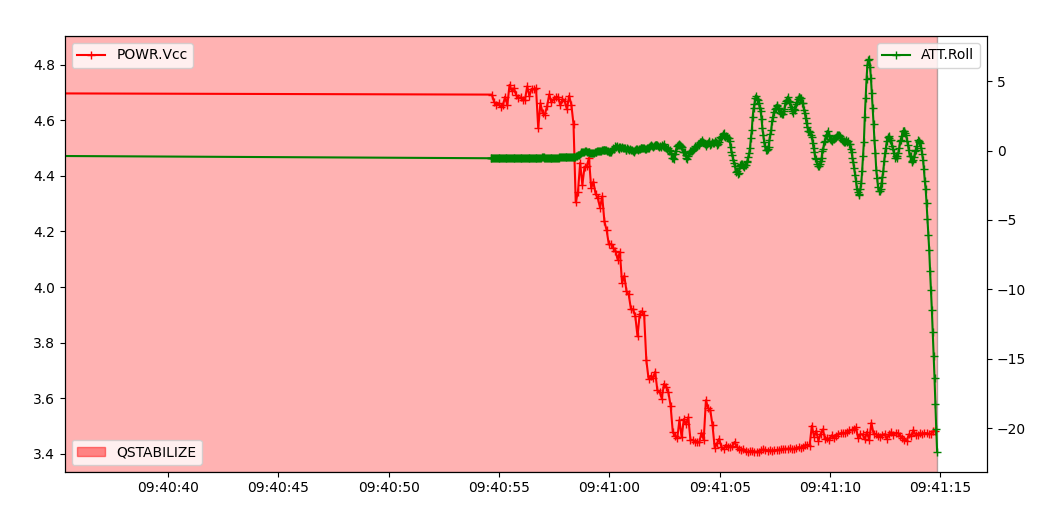
POWR.Vcc is your 5V rail. It starts at 4.7 (I’ve noticed Qiotek boards often have rather low VCC) then drops to 3.4V.
more importantly your 3.3V rail which powers the H743 dropped to 2.2V:
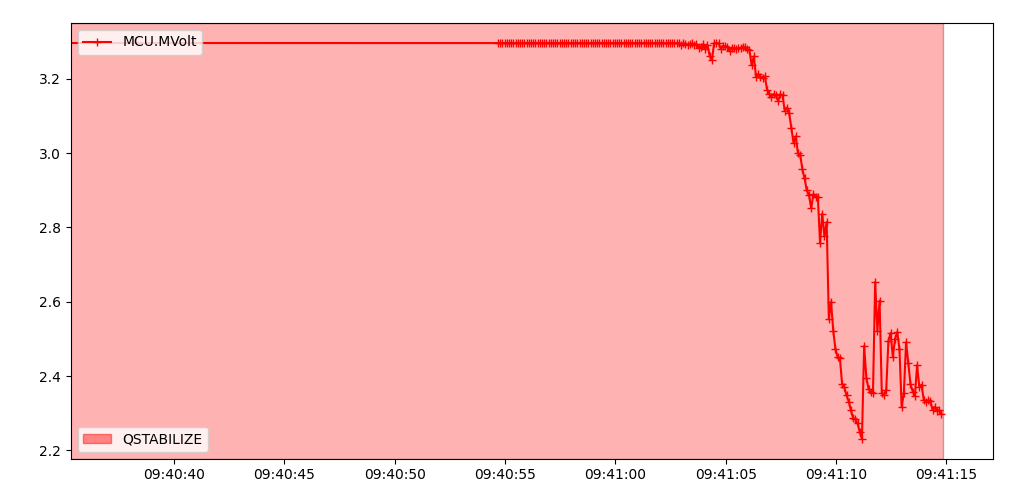
that makes for an extremely sick autopilot. It should stay within a few millivolts of 3.3V.
5 Likes
Hello
I’m building VTOL based on ev350 body frame. After updating to 4.4 i cannot calibrate the baro anymore !. I’m using cube orange FC. Is there any reason for that .
Greetings
Drones have never stopped surprising me when it comes to the spectacular ways in which they fail. I’ve never seen one do that before! Did you figure out why the power went low?
It pains me to admit it, but it was a simple cold solder.
4 Likes

Plane stable 4.4.1 has just been released. This is a minor update over 4.4.0. The changes are:
- Airbotf4 features minimised to build for 4.4
- ChibiOS clock fix for 480Mhz H7 boards (affected FDCAN)
- H750 external flash optimisations for to lower CPU load
- MambaF405Mini fixes to match manufacturer’s recommended wiring
- RADIX2 HD support
- RPI hardware version check fix
- YJUAV_A6SE support
- support Himark DroneCAN servos
- support Hobbywing DroneCAN ESCs
- fixed control surface deflection on quadplanes in VTOL takeoff wait
- fixed bug in parameter default handling in SITL
- allow selection of mission sdcard storage on custom.ardupilot.org
- added support for SDMODELH7V1
- fixed battery monitor default for QiotekZealotF427 and QiotekZealotH743
- support 8 bit directional dshot channels on KakuteH7-wing
- improved handling of high vibration in EKF3 with new EK3_GLITCH_RADIUS options
- allow reset of battery SoC for DroneCAN battery monitors
- update GPIOs for Navigator board in HAL_Linux
- pull RTS lines low on Pixhawk6C on startup
- added log_file_content in scripting for aerobatics
- added asymmetry factor for skid steering on rovers
- updated defaults for luminousbee5 boards
Many thanks to everyone who tested the beta releases!
Happy flying!
3 Likes
Please tell me, in FBWA mode, the rudder output of the servo is completely different before unlocking and after unlocking, including the feedback rudder amount of shaking the flight control, and the rudder amount controlled by the remote control, both will be very large after unlocking. The flight control It’s the same problem with speedybee f405 wing firmware version 4.3.5-4.4.1. Including matek f405 wmn also has the same problem. It has been bothering me for a very long time. Hope it can be resolved, thank you very much.
Thanks Devs for all your continuing hard work, much appreciated.
Nick UK
Mr. tridge,
SITL simulation with Xplane 11 still can’t be played because all control surfaces are moved to their end points and fixed there as soon as MissionPlanner is connected with Xplane. This is same situation as I had reported before (No. 94). How I can manage this trouble?
Here is my parameters.
X-PLANE.param (22.6 KB)
Hello Tim
What kind of “cold solder” was the guilty?. I have 3 Qiotek boards, 2 of them in their box, so will be interested to know the details…thank
Oh not the Qio-Tek gear - my soldering of an XT-90 to the PDB.