I have made a TREMENDOUS MISTAKE:
TECS_PTCH_FF_FF_K=-0.6
when it should have been TECS_PTCH_FF_K,0=-0.06
I have made a TREMENDOUS MISTAKE:
TECS_PTCH_FF_FF_K=-0.6
when it should have been TECS_PTCH_FF_K,0=-0.06
To devs attention, please review my issue, it could be a very bad tecs malfunction:
Is it possible that the TECS.iph bug is back?
I repeat, there was a wrong setting of TECS_PTCH_FF_K=-0.6 instead of TECS_PTCH_FF_K=-0.06.
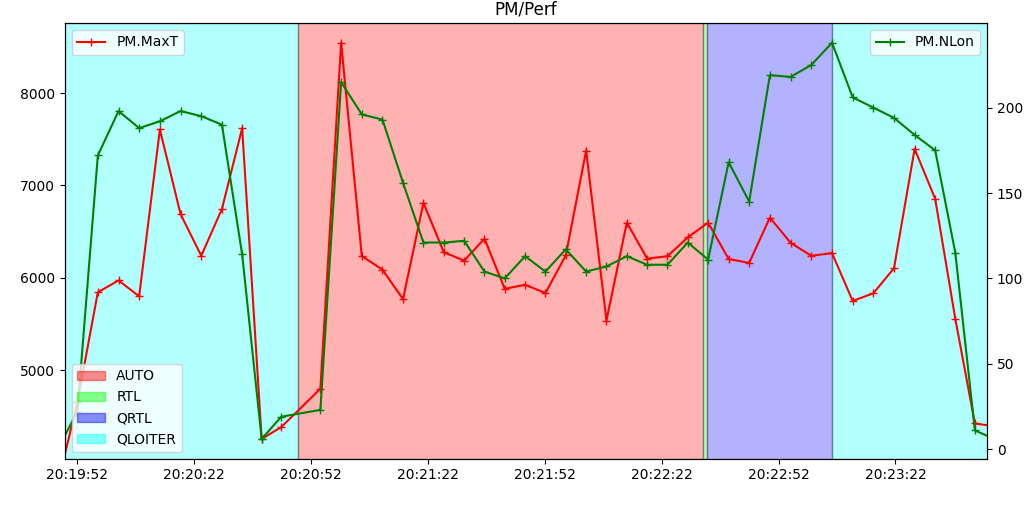
@tridge we had a loss of a plane today due to an internal errors 3000. This was a new CubeOrange+, Mauch power supply, 2x iFlight BlHeli ESC’s, SDP3X airspeed sensor, Here3+, and LightWare SF30/C. After the 2nd takeoff and turn to the first waypoint, I looked at Mission Planner and saw INTERNAL ERROR, DISARMED, and (SAFETY) in the air while in auto mode. I had no ability to gain control with mode changes as safety disables our servos in the few seconds before impact. In gathering information, I also noticed POWR.VServo appeared to drop to significantly lower values a few seconds before this catastrophy.
Log here: Microsoft OneDrive - Access files anywhere. Create docs with free Office Online.
0x3000 indicates iomcu reset + iomcu fail, which seems pretty bad
Unsure if it’s related, and I haven’t dug into it, but I’m rather certain that I saw automatic disarms on the ground just a few seconds after arming in FBWA and maybe even Manual mode. I was assuming due to a safety switch (that parameters were set to disllow changes while armed). I’ll search for logs.
Possible link similar issue (Cube Orange) RC Inputs & Outputs freeze (crashlog) · Issue #22405 · ArduPilot/ardupilot · GitHub
@Naterater your IOMCU reset twice in quick succession, almost certainly due to power glitches as indicated by the logged voltage glitches
The rapid double reset is what prevented the code that automatically restores the safety state from working:
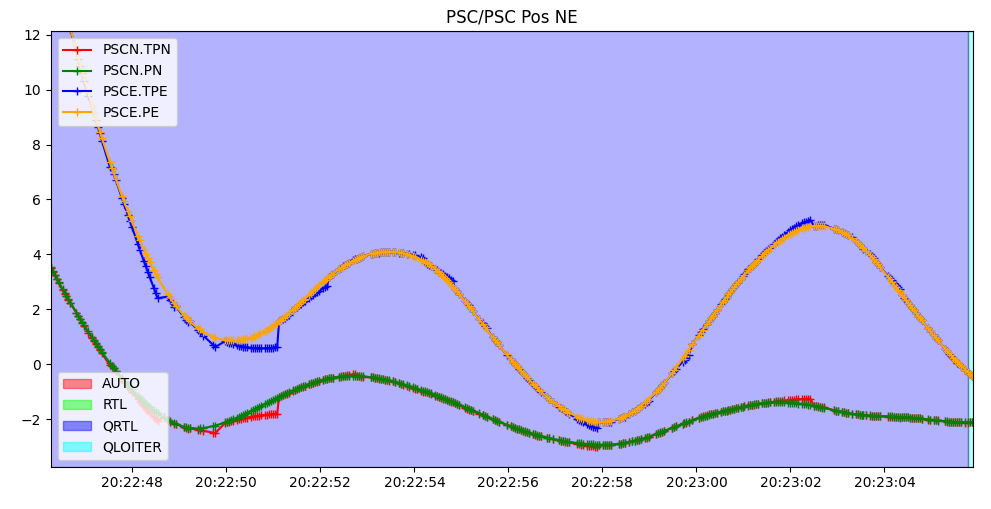
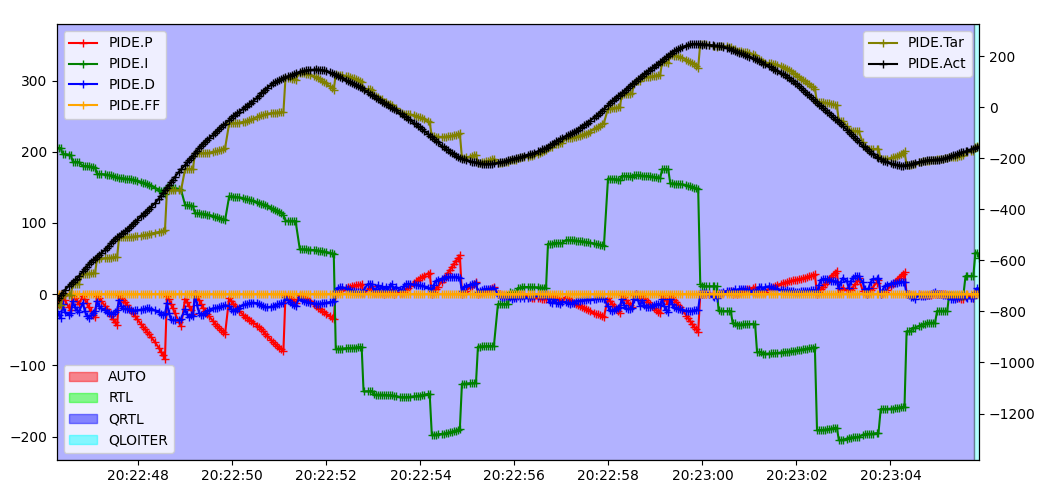
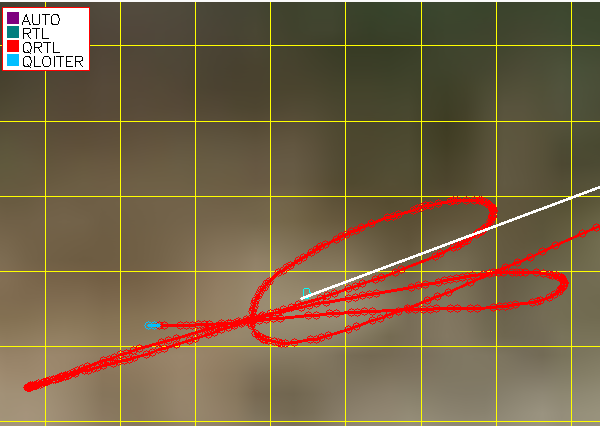
@tridge Help me analyze the reason for the automatic oscillation of the roll and pitch during the automatic landing phase of the Quadplane. Thank you so much!
@Naterater this PR allows us to survive a double IOMCU reset like you had:
it is still not entirely clear what caused your double reset. One possibility is large enough back-EMF on signal lines from actuators (servos, ESCs) causing the IOMCU to reset
If I was you I would not use that particular CubeOrangePlus again, just because it could be a hardware fault, even though there is no strong evidence it is faulty
The two most serious issues are the RC protocol change and the IOMCU double reset.
The RC protocol change was observed on a CUAVv5, and involved re-detecting SBUS as DSM while flying, resulting in incorrect RC input. We had previously disallowed a change of detected protocol for FMU based detections by default, this changes the IOCMU based RC input to do the same.
The double IOMCU reset is the bug found by @Naterater where a power glitch caused the IOMCU to reset twice in quick succession, resulting in the safety state changing to safety enabled. We now ensure that even with multiple IOMCU resets we maintain the safety state.
Please report all testing of this beta!
sorry for taking so long to get back to you on this.
The amount of horizontal position oscillation is under 5m in this log, but it is very distinctive:
Thanks for your suggestion, I’ll get back to you after I test it.
Only open EKF3 test and land normally.
https://drive.google.com/file/d/1V5kZ7PqZdRUR-Q6CSdulvWkBhCr1m5jS/view?usp=sharing
@tridge
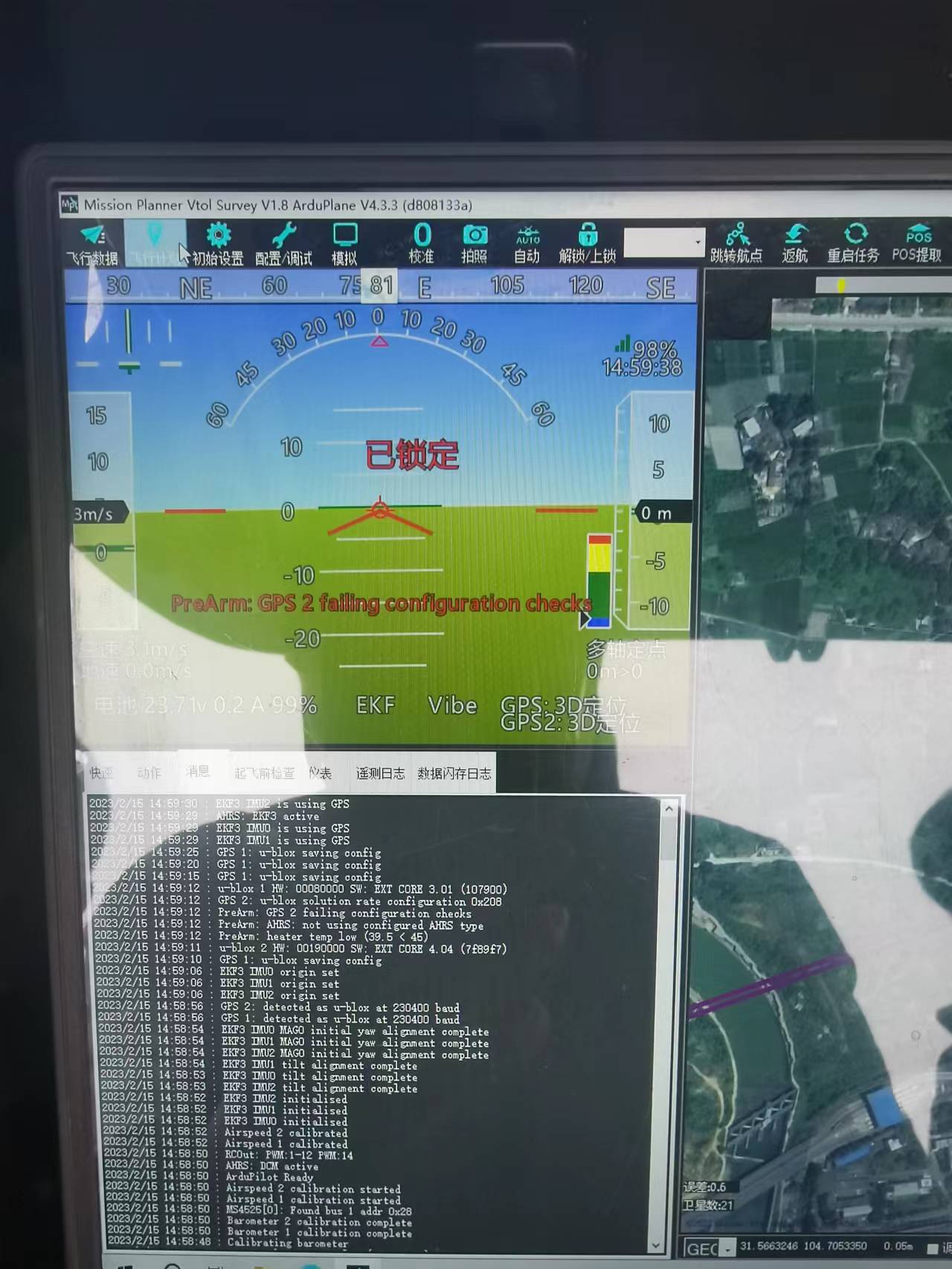
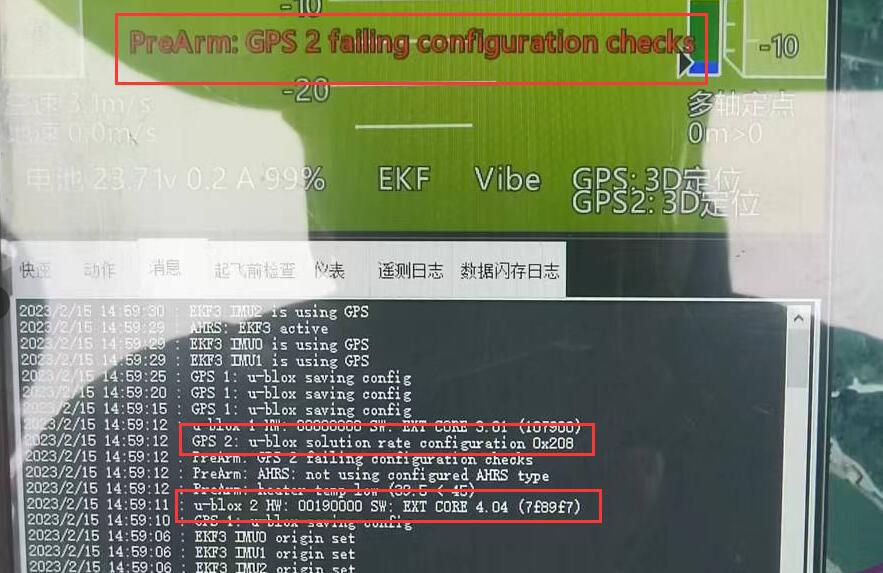
I use ArduPlane4.3.3 firmware. After the M9N GPS is initialized, the configuration cannot be saved, and there is a problem.
I did the following tests:
Below I provide error screenshots and flight control logs:
I saw a similar problem, not sure if this is the cause.
https://github.com/ArduPilot/ardupilot/issues/15135
What make is the GPS? Did you flash the latest firmware on it? That is the if it is CAN.
@pompecukor
It is the commonly used M9N module, which uses serial port link, not CAN. I’m using the default firmware version 4.04, which is the latest version as far as I know.
With 4.3.2, 4.3.3 and also with 4.3.4beta1 there is a problem with the F.Port connection of a receiver (FrSky RX6R) to a Matek F765 wing. Configuration as specified in the wiki.
The RC connection as well as telemetry works when the FC is powered. After about 10-15 seconds the FC then loses contact with the receiver.
If only the FC is restarted after that, no connection will be established. Only when the supply of the FC is interrupted and restored, the receiver is recognized again briefly.
Thanks to everyone who has been testing!
@makeflyeasy can you check if beta2 fixes the GPS configuration issue?