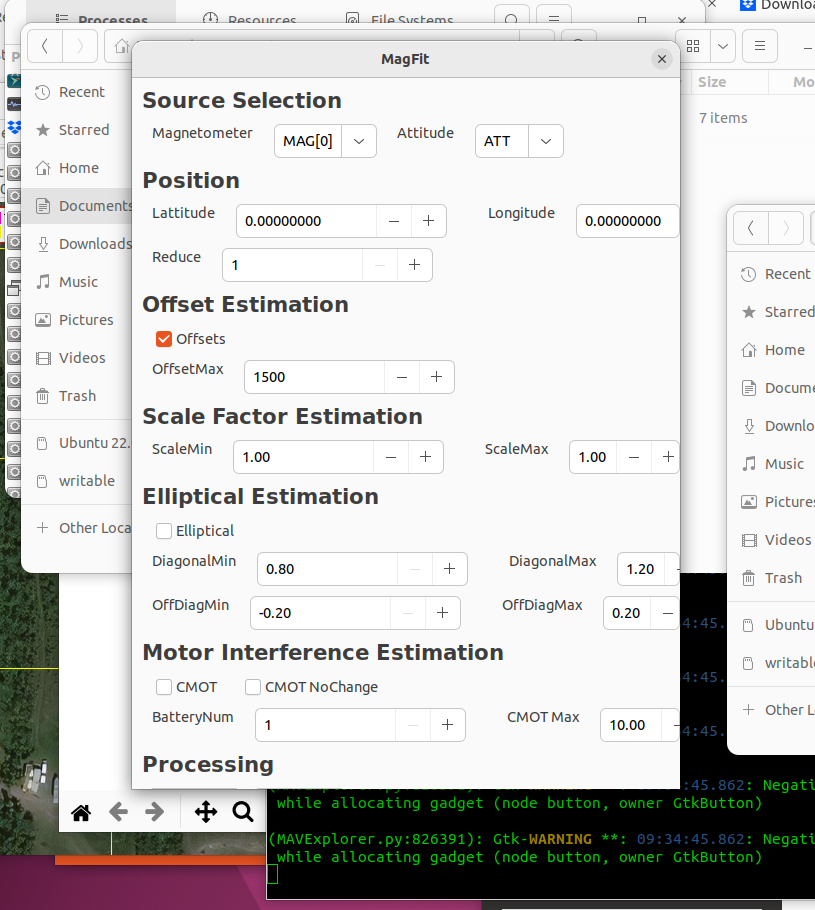
Here’s another screen shot of the MagFit screen from Ubuntu 22.04 running on a new install on bare metal. I’m running MAVExplorer.py 1.8.59 from a clone I took direct from GitHub on the weekend. Also python 3.10.6
Here’s another screen shot of the MagFit screen from Ubuntu 22.04 running on a new install on bare metal. I’m running MAVExplorer.py 1.8.59 from a clone I took direct from GitHub on the weekend. Also python 3.10.6