I’ve just released plane 4.3.0beta1. This is the first beta of the 4.3.0 stable release. There are a lot of
changes since the 4.2.3 stable release. Key changes are:
added new boards AtomRCF405NAVI, KakuteH7Mini-Nand, SkystarsH7HD
added bi-directional dshot for several new boards
EK3_GPS_VACC_MAX threshold to control when GPS altitude is used as alt source
EKF ring buffer fix for slow sensor updates
EKF3 source set change captured in replay logs
numerous gimbal support improvements
improved RemoteId support
SecureBoot support with remote update of secure boot public keys
crash_dump.bin file saved to SD Card on startup (includes details re cause of software failures)
several new pre-arm checks (AHRS type, scripts, terrain)
numerous scripting improvements
fixed scripting restart leaking memory
Benewake H30 radar support
BMI270 IMU performance improvements
Logging pause with auxiliary switch
TeraRanger Neo rangefinder support
support for both AMSL and ellipsoid height in most GPS drivers
Custom controller support
parameter defaults sent with param FTP and onboard logs
Sim on Hardware allows simulator to run on autopilot
added Q_LAND_ALTCHG parameter
added climb before QRTL for safer QRTL from low altitudes
added support for logging pre and post filtered FFT data
support triple-notch harmonic notch filter
support up to 32 actuators (with SERVO_32_ENABLE parameter)
support EFI input over DroneCAN
by default only run notch filter on first IMU
added ESC_TLM_MAV_OFS parameter for mapping ESCs to MAVLink ESC telemetry
added Q_NAVALT_MIN for quadplane takeoff
added ICE redline governor
added in-flight FFT notch tuning option
added Sagetech ADSB support
added INS_HNTCH_FM_RAT parameter for handling under-hover throttle
improvements to filtering on ICM42xxx IMUs
added option parameters to NAV_VTOL_LAND mission item for fixed wing approach
Please report flight tests of the 4.3.0beta series in this forum. Both good and bad results are welcome.
Today I finally had the opportunity to fly with the 4.3.0 beta 1 firmware (on 3 aircraft):
motorglider, Matek F405 Wing, update from 4.2.3 stable
Z84 VTOL Quad, Matek F 765 Wing, update from 4.2.3 stable
mini skywalker, first setup and flight with Matek H743 slim.
Everything worked fine without problems (MANU, FBWA, QHOVER, transitions, CRUISE, Autostart) including a perfect AngleAssist after stall due to too steep climb of the Z84.
I’ve just released plane 4.3.0beta2. This has quite a few changes over beta1
fixes for VideoTX, fixing buffer overrun and tramp handling
fixed spurious error about sending RPM when RPM disabled
fixed an EKF3 lane switch issue that can cause incorrect height with dual GPS
fixed mission cmd to mission int initialisation error
fixed mission jump tracking init on startup
fixed OSD view roll/pitch error for tailsitters
added SkystarsH7HD-bdshot
fixed SkystarsH7HD VTX control
reduced memory usage on MatekF405-CAN board
disable SLCAN when armed to reduce CPU load
enable CAN battery mon on CUAV V6X by default
added arming check for Q_M_SPIN_MIN value too high
fixed reporting of RPM from harmonic notch
improved handling of airspeed errors and airspeed auto disable
fixed SERVO_AUTO_TRIM for multiple outputs of same type
fixed auto baud rate detection on SBF/GSOF/NOVA GPS
increased max board name length for mavlink statustext to 23
fixed incorrect disable of notches for non-throttle notch
added notch filter slew limit to reduce notch errors
added ARMING_OPTIONS to control display of pre-arm errors
several OSD fixes for params, font and resolution
support PWM type transmission for CAN PWM output
support Currawong ECU as EFI backend
support lua scripts for EFI backends
implement SkyPower and HFE CAN EFI lua scripts
improved speed of log download with dataflash block backends
disabled all GPS drivers except uBlox and NMEA on Pixhawk1-1M to save flash
disabled all GPS drivers except uBlox on MatekF405-bdshot and omnibusf4pro-bdshot
fixed FFT indexing bug
added USART2 for AIRLink
allow reset to default airspeed using mission item DO_CHANGE_SPEED
Please test this beta if you can. There may be another beta after this one depending on test feedback, or we may go straight to the release.
Happy flying!
I’ve just released 4.3.0beta3. It has the following changes over beta2:
fixed BRD_SAFETY_MASK for enabling outputs when safety on
fixed persistence of mapping of CAN airspeed sensors to instances
fixed precision of NMEA serial output function
added report of “Engine Running” when using ICE
fixed handling of defaults.parm files with lines over 100 chars
fixed handling of defaults.parm files with no newline on last line
fixed possible divide by zero when changing to GUIDED on quadplanes
Many thanks to the users doing testing that found these issues!
I hope this will be the final beta and expect to release 4.3.0 after I do some test flights this weekend.
Please report all test results!
While testing in the simulator, I discovered an issue with height rate demand oscillations during auto-landings, caused by #20792. I have provided logs and more details in the PR.
Edit: This behavior was triggered by that PR, but the root cause was a too steep glide slope; I don’t think it should oscillate like that, but this was mostly user error.
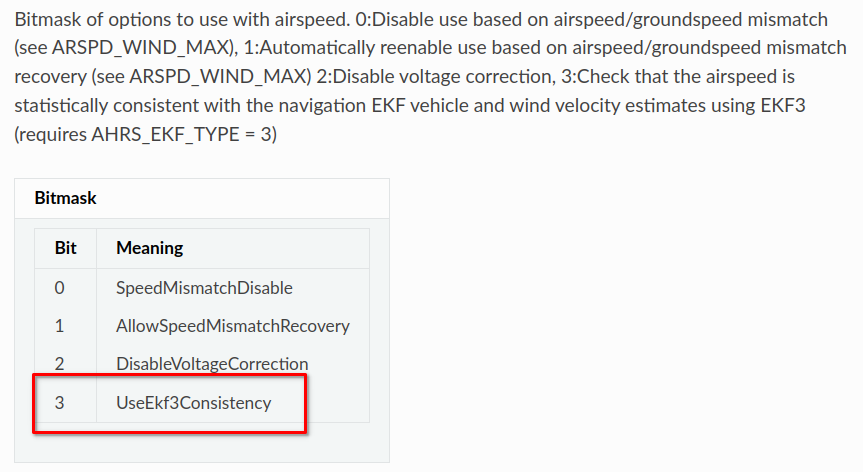
Please, what does it mean ARSPD_OPTIONS, 11? This option has been changed from orig. option 3 after the upgrade to 4.3.0. Nothing like that is listed in the Complete Parameter List.