it is almost certainly the airspeed sensor. A properly installed airspeed sensor really helps.
The new landing stages can be a bit confusing.
First off, as the messages come from the MissionPlanner messages tab, the bottom message in the above list is the first one, the top message is the last one.
The stages of a normal quadplane landing are:
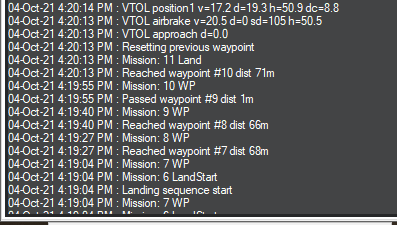
- VTOL approach: in this stage the aircraft is still flying fixed wing. The d=101.5 is the distance to the landing point in meters. In this stage the landing logic is monitoring the speed and position of the aircraft to calculate when airbraking should start.
- VTOL airbrake: this is a stage where the VTOL motors are started at low throttle to slow the aircraft (relying on momentum drag from propellers going sideways through the air to slow the aircraft without gaining height). The various annotations are: v=20.3 is ground speed, d=102 is distance to landing point, sd=103 is calculated stopping distance (how long it will take to stop based on Q_TRANS_DECEL and ground speed) and h=50.9 is height.
- VTOL position1: The position1 stage is for moving between flight dominated by fixed wing control to flight dominated by VTOL control. It aims to smoothly slow the aircraft to where full multirotor control can take over. The v, d and h are as above, the additional annotation of dc is the desired closing speed on the landing point.
- VTOL position2: this is full VTOL control for repositioning above the landing point.
After that normally comes “Land descend started” and “Land final started”.
The big change from 4.0 is the addition of the approach and airbrake stages. These allow you to have a much longer gap between the landing point and the previous waypoint. In 4.0 you had to carefully choose that gap, and to get a really good landing you had to move the pre-landing waypoint based on the current wind speed. In 4.1.0 you can just leave a big gap and let the aircraft calculate when it should engage the VTOL motors for a good landing.
The key parameter that affects the landing is Q_TRANS_DECEL which is how fast the plane naturally slows down when you drop the forward throttle.
Cheers, Tridge
2 Likes
So the VTOL approach distance is auto calculated based on various Aircraft and their Speed .
Here VTOL approach distance d =101.5 and VTOL airbrake d =102 almost same for activate the slow Quad motor which means will both happen at same time. little confusion here.
yes, it is because the WP before the land was close enough that there was no room for approach. So it went through the approach state in zero time, straight to airbrake.
With 4.1.0 you can put that WP much further back which allows the system to properly adjust for wind and ground speed. It makes mission planning a lot easier and also results in less battery usage in land (as it gains much less height on the back transition due to the airbraking stage).
YES as you said it will work well for predefined auto mission ,but here my concern is whenever I want i can able to land the plane but not with predefined mission . why because my mission may end with any time (within endurance of plane) depending on the mission.
i have Suggestion for landing .
Landing Waypoint should be separate as below which independent to mission waypoint.
so each and every waypoint can change with different height and speed that model can fly for landing.
so aircraft can fly at any mode until execute the land command, when execute land command it will follow the landing waypoint and VTOL transition at transfer point to Quad when entering transfer point(Landing point) radius.
Note :this waypoint is auto generated based on plane speed and bank angle ,Stall speed .
like TAKEOFF mode in fixed Wing .when command takeoff it will reach particular height (predefined) and loiter over the home point without entering the Auto mode.
i remember that long back this feature also not available …Autotakeoff was part of mission only but now its independent with Auto mode.
so i think it can be improved in future.
For those of you converting parameters from 4.0 to 4.1 manually, I have done a PID converter form here:
https://uav.tridgell.net/convert_pid.html
5 Likes
Hello, I have a mutiplex funray with a matek f765 and the 4.1. It flies very well so far. But I like that he reacts more aggressively to control commands. But I found no value for rc rate.
I read this somewhere, but I no longer fine it. Can someone give me a tip?
And that’s not exactly what it is. I just want a more aggressive rc input output
For this you would have to set negative Expo on the transmitter.
you haven’t mentioned what flight mode you are using. I’ll assume FBWA.
Assuming you’ve completed an AUTOTUNE with 4.1.0, the key parameters that impacts the aggressiveness is RLL2SRV_TCONST and RLL2SRV_RMAX. The TCONST is the time constant for changing roll angle. So a smaller number means faster, a larger number means slower.
The RMAX value is the limit on the roll rate, in degrees/second. A larger value means it will have a higher limit.
2 Likes
We have two systems that provide similar functionality:
- the first is to set RTL_AUTOLAND=2, then you can setup a sub-mission containing a DO_LAND_START followed by whatever landing sequence you like. When you RTL it will search for the nearest DO_LAND_START, then switch to AUTO and follow that sub-mission. This is great where you want a specific path for landing approach
- the second is to use QRTL. In 4.1.0 when you switch to QRTL it does the whole APPROACH → AIRBRAKE → POS1 → POS1 → LANDING sequence. The APPROACH can be from a long way away. This doesn’t let you control the direction of the landing approach, it will just approach from the place where you enter QRTL, but is great for coming back and landing from anywhere
1 Like
that’s exactly what I was looking for, thank you very much
1 Like
hi tridge ,
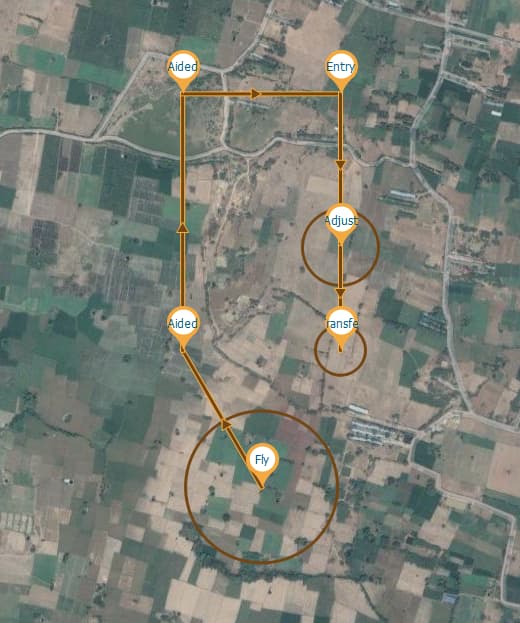
I have tested RTL_AUTOLAND=2 and made waypoint like this to test .
I have executed Auto mode as it follow its route up to waypoint 6 and continued waypoint 9 after reached waypoint 9 again it looped to waypoint 7 to 9 . this is keep looping number of times and doesn’t come for landing .after that I executed QRTL to land.
04-Oct-21 11:48:41 AM : SIM Hit ground at 1.455758 m/s
04-Oct-21 11:48:26 AM : VTOL position2 started v=4.9 d=4.6
04-Oct-21 11:48:18 AM : EKF yaw reset -0.30
04-Oct-21 11:48:18 AM : VTOL position1 v=20.3 d=71.3 h=14.9 dc=16.9
04-Oct-21 11:48:16 AM : VTOL airbrake v=22.6 d=127 sd=128 h=12.8
04-Oct-21 11:47:55 AM : VTOL approach d=391.5
04-Oct-21 11:47:46 AM : Mission: 7 WP
04-Oct-21 11:47:46 AM : Mission: 6 LandStart
04-Oct-21 11:47:46 AM : Landing sequence start
04-Oct-21 11:47:46 AM : Mission: 7 WP
04-Oct-21 11:47:46 AM : Mission: 6 LandStart
04-Oct-21 11:47:45 AM : Mission complete, changing mode to RTL
04-Oct-21 11:47:45 AM : Reached waypoint #9 dist 78m
04-Oct-21 11:47:23 AM : Mission: 9 WP
04-Oct-21 11:47:23 AM : Reached waypoint #8 dist 78m
04-Oct-21 11:47:03 AM : Mission: 8 WP
04-Oct-21 11:47:03 AM : Reached waypoint #7 dist 49m
04-Oct-21 11:47:03 AM : Mission: 7 WP
04-Oct-21 11:47:03 AM : Mission: 6 LandStart
04-Oct-21 11:47:03 AM : Landing sequence start
04-Oct-21 11:47:03 AM : Mission: 7 WP
04-Oct-21 11:47:03 AM : Mission: 6 LandStart
04-Oct-21 11:47:01 AM : Mission: 8 WP
04-Oct-21 11:47:01 AM : Reached waypoint #7 dist 79m
04-Oct-21 11:46:32 AM : Mission: 7 WP
04-Oct-21 11:46:32 AM : Mission: 6 LandStart
04-Oct-21 11:46:32 AM : Landing sequence start
04-Oct-21 11:46:32 AM : Mission: 7 WP
04-Oct-21 11:46:32 AM : Mission: 6 LandStart
04-Oct-21 11:46:31 AM : Mission complete, changing mode to RTL
04-Oct-21 11:46:31 AM : Reached waypoint #9 dist 77m
04-Oct-21 11:46:09 AM : Mission: 9 WP
04-Oct-21 11:46:09 AM : Reached waypoint #8 dist 76m
04-Oct-21 11:45:47 AM : Mission: 8 WP
04-Oct-21 11:45:47 AM : Reached waypoint #7 dist 78m
04-Oct-21 11:45:29 AM : Mission: 7 WP
04-Oct-21 11:45:29 AM : Mission: 6 LandStart
04-Oct-21 11:45:29 AM : Landing sequence start
04-Oct-21 11:45:29 AM : Mission: 7 WP
04-Oct-21 11:45:29 AM : Mission: 6 LandStart
04-Oct-21 11:45:24 AM : Mission: 7 WP
04-Oct-21 11:45:24 AM : Mission: 6 LandStart
04-Oct-21 11:45:24 AM : Landing sequence start
04-Oct-21 11:45:24 AM : Mission: 7 WP
04-Oct-21 11:45:24 AM : Mission: 6 LandStart
04-Oct-21 11:45:18 AM : Mission: 7 WP
04-Oct-21 11:45:18 AM : Mission: 6 LandStart
04-Oct-21 11:45:18 AM : Landing sequence start
04-Oct-21 11:45:18 AM : Mission: 7 WP
04-Oct-21 11:45:18 AM : Mission: 6 LandStart
04-Oct-21 11:45:17 AM : Mission complete, changing mode to RTL
04-Oct-21 11:45:17 AM : Reached waypoint #9 dist 78m
04-Oct-21 11:44:55 AM : Mission: 9 WP
04-Oct-21 11:44:55 AM : Reached waypoint #8 dist 76m
04-Oct-21 11:44:33 AM : Mission: 8 WP
04-Oct-21 11:44:33 AM : Reached waypoint #7 dist 78m
04-Oct-21 11:44:03 AM : Mission: 7 WP
04-Oct-21 11:44:03 AM : Mission: 6 LandStart
04-Oct-21 11:44:03 AM : Landing sequence start
04-Oct-21 11:44:03 AM : Mission: 7 WP
04-Oct-21 11:44:03 AM : Mission: 6 LandStart
04-Oct-21 11:44:03 AM : Mission complete, changing mode to RTL
04-Oct-21 11:44:03 AM : Reached waypoint #9 dist 78m
04-Oct-21 11:43:41 AM : Mission: 9 WP
04-Oct-21 11:43:41 AM : Reached waypoint #8 dist 78m
04-Oct-21 11:43:19 AM : Mission: 8 WP
04-Oct-21 11:43:19 AM : Reached waypoint #7 dist 79m
04-Oct-21 11:42:50 AM : Mission: 7 WP
04-Oct-21 11:42:50 AM : Mission: 6 LandStart
04-Oct-21 11:42:50 AM : Landing sequence start
04-Oct-21 11:42:50 AM : Mission: 7 WP
04-Oct-21 11:42:50 AM : Mission: 6 LandStart
04-Oct-21 11:42:50 AM : Mission complete, changing mode to RTL
04-Oct-21 11:42:50 AM : Reached waypoint #9 dist 77m
04-Oct-21 11:42:27 AM : Mission: 9 WP
04-Oct-21 11:42:27 AM : Reached waypoint #8 dist 76m
04-Oct-21 11:42:08 AM : Mission: 8 WP
04-Oct-21 11:42:08 AM : Reached waypoint #7 dist 5m
04-Oct-21 11:40:54 AM : Mission: 7 WP
04-Oct-21 11:40:54 AM : Mission: 6 LandStart
04-Oct-21 11:40:54 AM : Reached waypoint #5 dist 23m
04-Oct-21 11:40:34 AM : Mission: 5 WP
04-Oct-21 11:40:34 AM : Reached waypoint #4 dist 51m
04-Oct-21 11:39:53 AM : Mission: 4 WP
04-Oct-21 11:39:53 AM : Reached waypoint #3 dist 49m
04-Oct-21 11:39:07 AM : Mission: 3 WP
04-Oct-21 11:39:07 AM : Reached waypoint #2 dist 50m
04-Oct-21 11:37:51 AM : Mission: 2 WP
04-Oct-21 11:37:51 AM : Reached waypoint 1 dist 84m
04-Oct-21 11:37:40 AM : Mission: 1 WP
04-Oct-21 11:37:05 AM : Takeoff to 50m at 200.0m to -1.2 deg
The DO_LAND_START doesn’t do anything if you don’t do an RTL, so it just skips over it in normal mission processing. Typically there would be a DO_JUMP before the DO_LAND_START to make up a circuit
See docs here:
https://ardupilot.org/plane/docs/automatic-landing.html#using-do-land-start
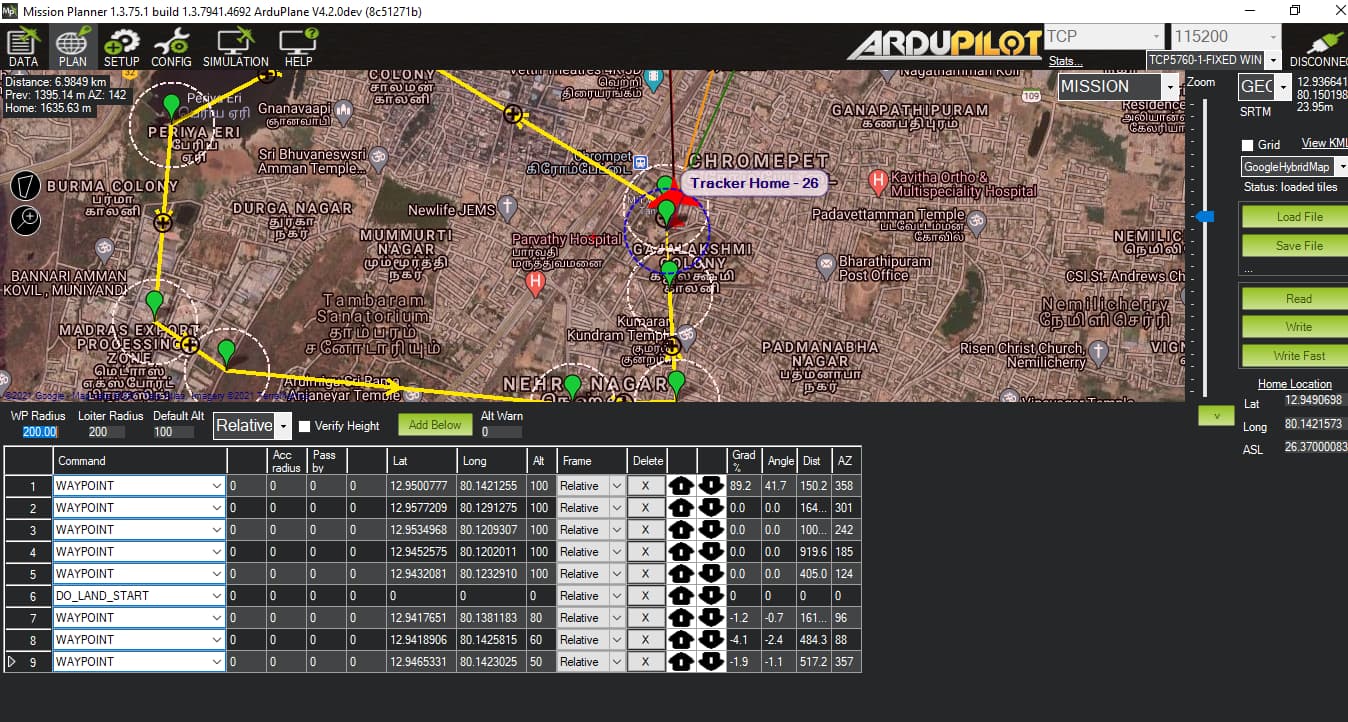
I have gone through the documents and followed your comments also and added LOITER_UNLIMITED instead of DO_JUMB before DO_LAND_START.
Aircraft start loitering at specified point , during loitering i just engaged RTL mode and its start follwing waypoint from 6 and follwed up to 9 but its doesnit land at all … its keep looping around point 7 to point 9.
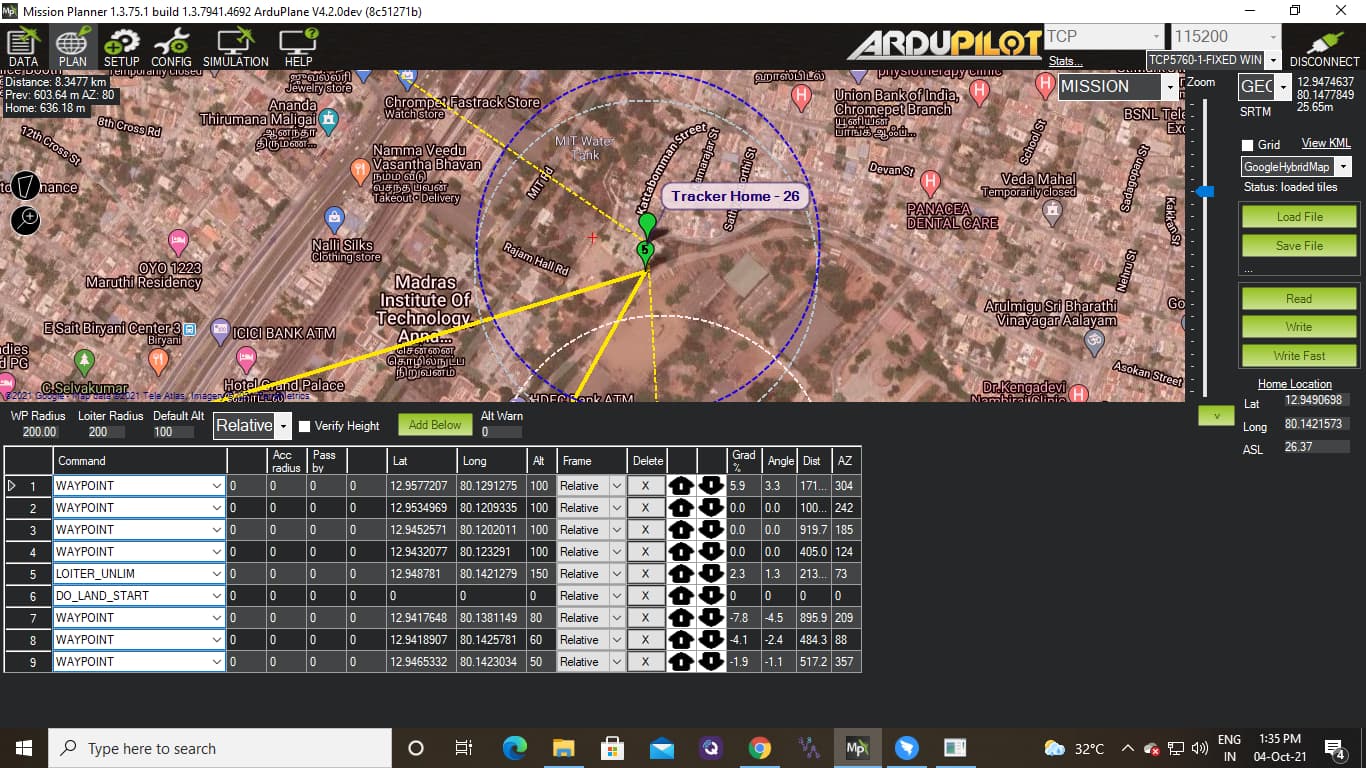
04-Oct-21 1:39:39 PM : Mission: 7 WP
04-Oct-21 1:39:39 PM : Mission: 6 LandStart
04-Oct-21 1:39:39 PM : Landing sequence start
04-Oct-21 1:39:39 PM : Mission: 7 WP
04-Oct-21 1:39:39 PM : Mission: 6 LandStart
04-Oct-21 1:39:39 PM : Mission complete, changing mode to RTL
04-Oct-21 1:39:39 PM : Reached waypoint #9 dist 71m
04-Oct-21 1:39:13 PM : Mission: 9 WP
04-Oct-21 1:39:13 PM : Reached waypoint #8 dist 68m
04-Oct-21 1:38:44 PM : Mission: 8 WP
04-Oct-21 1:38:44 PM : Reached waypoint #7 dist 71m
04-Oct-21 1:38:06 PM : Mission: 7 WP
04-Oct-21 1:38:06 PM : Mission: 6 LandStart
04-Oct-21 1:38:06 PM : Landing sequence start
04-Oct-21 1:38:06 PM : Mission: 7 WP
04-Oct-21 1:38:06 PM : Mission: 6 LandStart
04-Oct-21 1:38:06 PM : Mission complete, changing mode to RTL
04-Oct-21 1:38:06 PM : Reached waypoint #9 dist 71m
04-Oct-21 1:37:40 PM : Mission: 9 WP
04-Oct-21 1:37:40 PM : Reached waypoint #8 dist 69m
04-Oct-21 1:37:11 PM : Mission: 8 WP
04-Oct-21 1:37:11 PM : Reached waypoint #7 dist 70m
04-Oct-21 1:36:33 PM : Mission: 7 WP
04-Oct-21 1:36:33 PM : Mission: 6 LandStart
04-Oct-21 1:36:33 PM : Landing sequence start
04-Oct-21 1:36:33 PM : Mission: 7 WP
04-Oct-21 1:36:33 PM : Mission: 6 LandStart
04-Oct-21 1:36:33 PM : Mission complete, changing mode to RTL
04-Oct-21 1:36:33 PM : Reached waypoint #9 dist 71m
04-Oct-21 1:36:07 PM : Mission: 9 WP
04-Oct-21 1:36:07 PM : Reached waypoint #8 dist 69m
04-Oct-21 1:35:38 PM : Mission: 8 WP
04-Oct-21 1:35:38 PM : Reached waypoint #7 dist 71m
04-Oct-21 1:35:00 PM : Mission: 7 WP
04-Oct-21 1:35:00 PM : Mission: 6 LandStart
04-Oct-21 1:35:00 PM : Landing sequence start
04-Oct-21 1:35:00 PM : Mission: 7 WP
04-Oct-21 1:35:00 PM : Mission: 6 LandStart
04-Oct-21 1:35:00 PM : Mission complete, changing mode to RTL
04-Oct-21 1:35:00 PM : Reached waypoint #9 dist 72m
04-Oct-21 1:34:34 PM : Mission: 9 WP
04-Oct-21 1:34:34 PM : Reached waypoint #8 dist 68m
04-Oct-21 1:34:05 PM : Mission: 8 WP
04-Oct-21 1:34:05 PM : Reached waypoint #7 dist 72m
04-Oct-21 1:33:27 PM : Mission: 7 WP
04-Oct-21 1:33:27 PM : Mission: 6 LandStart
04-Oct-21 1:33:27 PM : Landing sequence start
04-Oct-21 1:33:27 PM : Mission: 7 WP
04-Oct-21 1:33:27 PM : Mission: 6 LandStart
04-Oct-21 1:33:27 PM : Mission complete, changing mode to RTL
04-Oct-21 1:33:27 PM : Reached waypoint #9 dist 72m
04-Oct-21 1:33:01 PM : Mission: 9 WP
04-Oct-21 1:33:01 PM : Reached waypoint #8 dist 68m
04-Oct-21 1:32:32 PM : Mission: 8 WP
04-Oct-21 1:32:32 PM : Reached waypoint #7 dist 71m
04-Oct-21 1:31:54 PM : Mission: 7 WP
04-Oct-21 1:31:54 PM : Mission: 6 LandStart
04-Oct-21 1:31:54 PM : Landing sequence start
04-Oct-21 1:31:54 PM : Mission: 7 WP
04-Oct-21 1:31:54 PM : Mission: 6 LandStart
04-Oct-21 1:31:54 PM : Mission complete, changing mode to RTL
04-Oct-21 1:31:54 PM : Reached waypoint #9 dist 72m
04-Oct-21 1:31:28 PM : Mission: 9 WP
04-Oct-21 1:31:28 PM : Reached waypoint #8 dist 69m
04-Oct-21 1:30:59 PM : Mission: 8 WP
04-Oct-21 1:30:59 PM : Reached waypoint #7 dist 70m
04-Oct-21 1:30:28 PM : Mission: 7 WP
04-Oct-21 1:30:28 PM : Mission: 6 LandStart
04-Oct-21 1:30:28 PM : Landing sequence start
04-Oct-21 1:30:28 PM : Mission: 7 WP
04-Oct-21 1:30:28 PM : Mission: 6 LandStart
04-Oct-21 1:30:21 PM : Mission: 7 WP
04-Oct-21 1:30:21 PM : Mission: 6 LandStart
04-Oct-21 1:30:21 PM : Landing sequence start
04-Oct-21 1:30:21 PM : Mission: 7 WP
04-Oct-21 1:30:21 PM : Mission: 6 LandStart
04-Oct-21 1:30:21 PM : Mission complete, changing mode to RTL
04-Oct-21 1:30:21 PM : Reached waypoint #9 dist 71m
04-Oct-21 1:29:55 PM : Mission: 9 WP
04-Oct-21 1:29:55 PM : Reached waypoint #8 dist 69m
04-Oct-21 1:29:26 PM : Mission: 8 WP
04-Oct-21 1:29:26 PM : Reached waypoint #7 dist 70m
04-Oct-21 1:28:48 PM : Mission: 7 WP
04-Oct-21 1:28:48 PM : Mission: 6 LandStart
04-Oct-21 1:28:48 PM : Landing sequence start
04-Oct-21 1:28:48 PM : Mission: 7 WP
04-Oct-21 1:28:48 PM : Mission: 6 LandStart
04-Oct-21 1:28:48 PM : Mission complete, changing mode to RTL
04-Oct-21 1:28:48 PM : Reached waypoint #9 dist 71m
04-Oct-21 1:28:22 PM : Mission: 9 WP
04-Oct-21 1:28:22 PM : Reached waypoint #8 dist 69m
04-Oct-21 1:27:53 PM : Mission: 8 WP
04-Oct-21 1:27:53 PM : Reached waypoint #7 dist 71m
04-Oct-21 1:27:15 PM : Mission: 7 WP
04-Oct-21 1:27:15 PM : Mission: 6 LandStart
04-Oct-21 1:27:15 PM : Landing sequence start
04-Oct-21 1:27:15 PM : Mission: 7 WP
04-Oct-21 1:27:15 PM : Mission: 6 LandStart
04-Oct-21 1:27:15 PM : Mission complete, changing mode to RTL
04-Oct-21 1:27:15 PM : Reached waypoint #9 dist 72m
04-Oct-21 1:26:49 PM : Mission: 9 WP
04-Oct-21 1:26:49 PM : Reached waypoint #8 dist 68m
04-Oct-21 1:26:20 PM : Mission: 8 WP
04-Oct-21 1:26:20 PM : Reached waypoint #7 dist 72m
04-Oct-21 1:25:43 PM : Mission: 7 WP
04-Oct-21 1:25:43 PM : Mission: 6 LandStart
04-Oct-21 1:25:43 PM : Landing sequence start
04-Oct-21 1:25:43 PM : Mission: 7 WP
04-Oct-21 1:25:43 PM : Mission: 6 LandStart
04-Oct-21 1:25:43 PM : Mission complete, changing mode to RTL
04-Oct-21 1:25:43 PM : Reached waypoint #9 dist 71m
04-Oct-21 1:25:17 PM : Mission: 9 WP
04-Oct-21 1:25:17 PM : Reached waypoint #8 dist 70m
04-Oct-21 1:24:50 PM : Mission: 8 WP
04-Oct-21 1:24:50 PM : Reached waypoint #7 dist 70m
04-Oct-21 1:23:51 PM : Mission: 7 WP
04-Oct-21 1:23:51 PM : Mission: 6 LandStart
04-Oct-21 1:23:51 PM : Landing sequence start
04-Oct-21 1:23:51 PM : Mission: 7 WP
04-Oct-21 1:23:51 PM : Mission: 6 LandStart
04-Oct-21 1:09:59 PM : Mission: 5 LoitUnlim
04-Oct-21 1:09:59 PM : Reached waypoint #4 dist 42m
04-Oct-21 1:09:41 PM : Mission: 4 WP
04-Oct-21 1:09:41 PM : Reached waypoint #3 dist 52m
04-Oct-21 1:08:59 PM : Mission: 3 WP
04-Oct-21 1:08:59 PM : Reached waypoint #2 dist 49m
04-Oct-21 1:08:13 PM : Mission: 2 WP
04-Oct-21 1:08:13 PM : Reached waypoint #1 dist 55m
04-Oct-21 1:07:49 PM : Mission: 1 WP
04-Oct-21 1:07:48 PM : Flight plan received
you need a LAND waypoint, at zero relative altitude
The DO_LAND_START doesn’t imply a land, for some people it is used to trigger a parachute release after flying to a desired location
I already tried with RETURN_TO_ LAUNCH relative Altitude was set zero only but that couldn’t solve the problem.
Any how I have to make VTOL_LAND COMMAND or Just LAND command with relative Altitude zero.
As you said i have planned the WP before the landing point is set at 360m away and mu RTL radius is -150m. the VTOL approach d=xx is auto calculated. if yes i would be wrong because i thought its based on RTL RADIUS which we set.

waypoint 10 is the landing point.
but still I’m facing the below issue.
how could the VTOL _approach d =0 when RTL radius set to 150 meter and WP before landing point set to 360m away.
I couldn’t get the successful VTOL transition and VTOL landing at desired point. Definitely it made me confusion .sorry for keep troubling you here.
1 Like
Sorry @tridge .was wrong statement and didn’t notice .( Instead of couldn’t I wrote could and now I edited)
Still now couldn’t get sucessful vtol transition and VTOL landing at desired point.