Dear Devs
Is there any reason why we should seriously pay attention to use 4.1.x (or above) version of new arduplane with limited boards like F405 wing (use it with one gps no more external sensors)??? I read reports (in ardu discuss topics) and also experienced on my own plane about issues which can be related to EKF3
affinity and lane switching.
Lot of users suggested is more safe to use EKF2 intstead of EKF3 on these limited F4 FC s for plane. I dont know if the reason that ekf2 need less computing power than ekf3 but It seems to me when the FC activate EKF3 (i ve got this message on OSD) the FC can fails (probably try to go back to DCM🤷♂️) and cannot handle the plane attitude, starting high oscillation or cause a crash during take off…or can this be 4.1.2 bug or issue as till now i didnt experinced it with 4.1.0 running on also with f405 wing Fc🤔
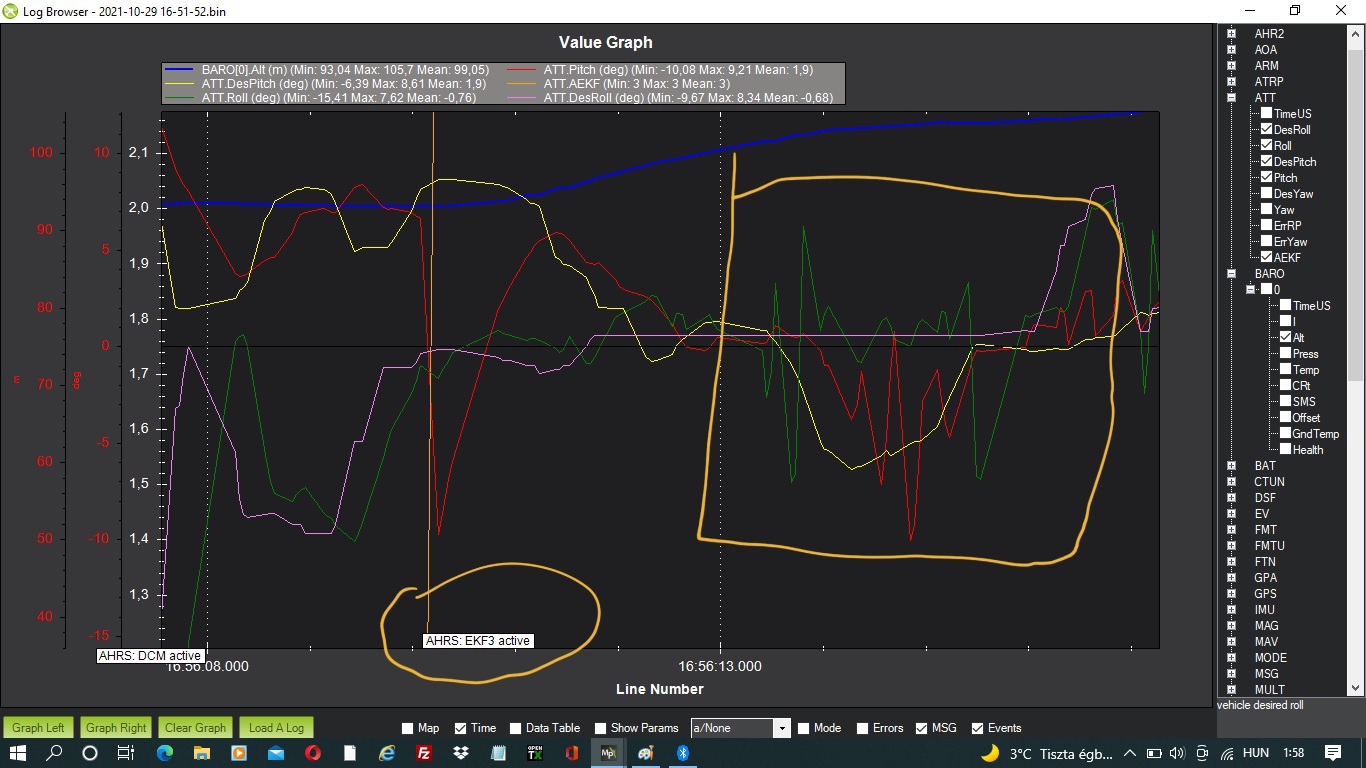
Reviewed my previous logs from 3 different flights with 4.1.2 and i not received EK3 active/ DCM active message, beside this flight where the oscialltion occured (as shown in the attached log photo)

I really dont want to use custom fw or older versions (older fw s not support dji msp osd which primary for me) if its not necesary and will be confirmed that new version 4.1x are safe to use on older F4 limited board like f405 wing! OR we need to use F7 FC s to prevent these weird midflight behavior.
I think a lot of us No need so much extra feature for a hobbyplane which required ekf3…and if it can cause issue…i really appreciate if we can use a 4.1x or above fw with default or switchable ekf2 option.
Thanks for advise
My log with this issue here for further analyse: 2021-10-29 16-51-52.bin - Google Drive
Thx