For those of you converting parameters from 4.0 to 4.1 manually, I have done a PID converter form here:
https://uav.tridgell.net/convert_pid.html
5 Likes
Hello, I have a mutiplex funray with a matek f765 and the 4.1. It flies very well so far. But I like that he reacts more aggressively to control commands. But I found no value for rc rate.
I read this somewhere, but I no longer fine it. Can someone give me a tip?
And that’s not exactly what it is. I just want a more aggressive rc input output
For this you would have to set negative Expo on the transmitter.
you haven’t mentioned what flight mode you are using. I’ll assume FBWA.
Assuming you’ve completed an AUTOTUNE with 4.1.0, the key parameters that impacts the aggressiveness is RLL2SRV_TCONST and RLL2SRV_RMAX. The TCONST is the time constant for changing roll angle. So a smaller number means faster, a larger number means slower.
The RMAX value is the limit on the roll rate, in degrees/second. A larger value means it will have a higher limit.
2 Likes
We have two systems that provide similar functionality:
- the first is to set RTL_AUTOLAND=2, then you can setup a sub-mission containing a DO_LAND_START followed by whatever landing sequence you like. When you RTL it will search for the nearest DO_LAND_START, then switch to AUTO and follow that sub-mission. This is great where you want a specific path for landing approach
- the second is to use QRTL. In 4.1.0 when you switch to QRTL it does the whole APPROACH → AIRBRAKE → POS1 → POS1 → LANDING sequence. The APPROACH can be from a long way away. This doesn’t let you control the direction of the landing approach, it will just approach from the place where you enter QRTL, but is great for coming back and landing from anywhere
1 Like
that’s exactly what I was looking for, thank you very much
1 Like
hi tridge ,
I have tested RTL_AUTOLAND=2 and made waypoint like this to test .
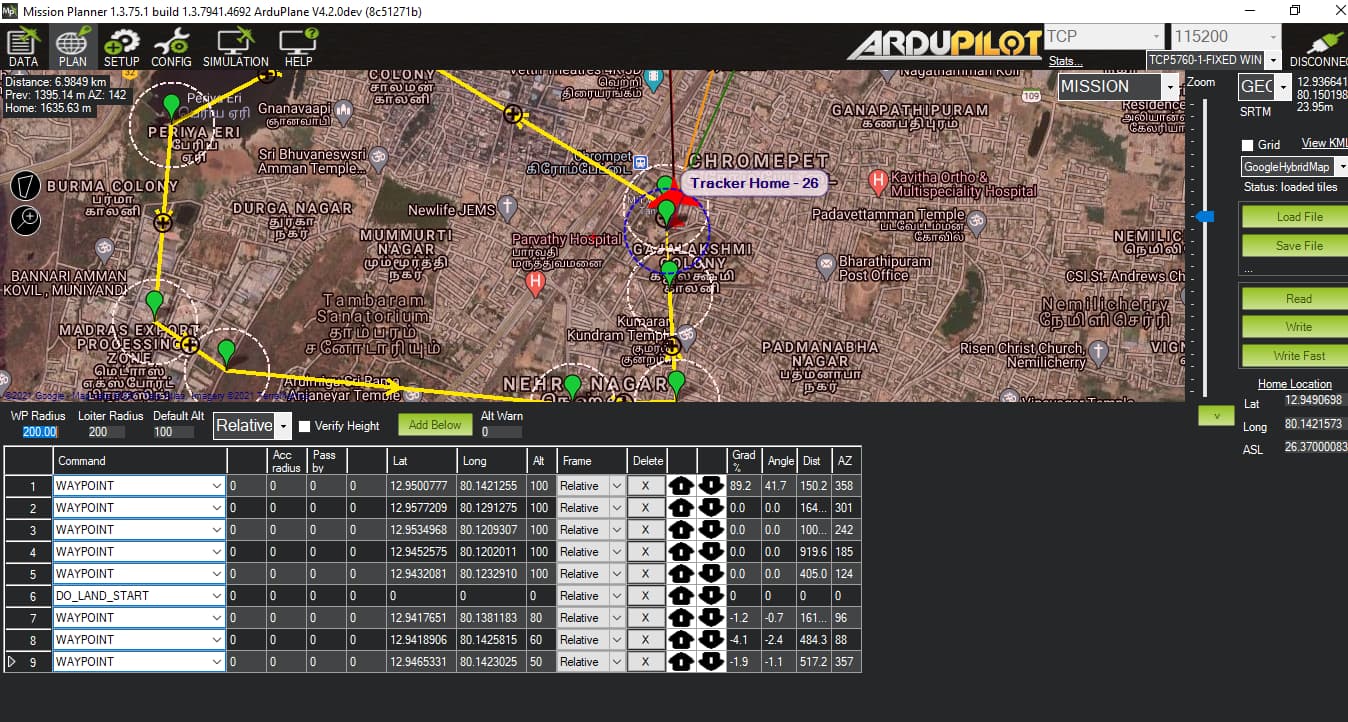
I have executed Auto mode as it follow its route up to waypoint 6 and continued waypoint 9 after reached waypoint 9 again it looped to waypoint 7 to 9 . this is keep looping number of times and doesn’t come for landing .after that I executed QRTL to land.
04-Oct-21 11:48:41 AM : SIM Hit ground at 1.455758 m/s
04-Oct-21 11:48:26 AM : VTOL position2 started v=4.9 d=4.6
04-Oct-21 11:48:18 AM : EKF yaw reset -0.30
04-Oct-21 11:48:18 AM : VTOL position1 v=20.3 d=71.3 h=14.9 dc=16.9
04-Oct-21 11:48:16 AM : VTOL airbrake v=22.6 d=127 sd=128 h=12.8
04-Oct-21 11:47:55 AM : VTOL approach d=391.5
04-Oct-21 11:47:46 AM : Mission: 7 WP
04-Oct-21 11:47:46 AM : Mission: 6 LandStart
04-Oct-21 11:47:46 AM : Landing sequence start
04-Oct-21 11:47:46 AM : Mission: 7 WP
04-Oct-21 11:47:46 AM : Mission: 6 LandStart
04-Oct-21 11:47:45 AM : Mission complete, changing mode to RTL
04-Oct-21 11:47:45 AM : Reached waypoint #9 dist 78m
04-Oct-21 11:47:23 AM : Mission: 9 WP
04-Oct-21 11:47:23 AM : Reached waypoint #8 dist 78m
04-Oct-21 11:47:03 AM : Mission: 8 WP
04-Oct-21 11:47:03 AM : Reached waypoint #7 dist 49m
04-Oct-21 11:47:03 AM : Mission: 7 WP
04-Oct-21 11:47:03 AM : Mission: 6 LandStart
04-Oct-21 11:47:03 AM : Landing sequence start
04-Oct-21 11:47:03 AM : Mission: 7 WP
04-Oct-21 11:47:03 AM : Mission: 6 LandStart
04-Oct-21 11:47:01 AM : Mission: 8 WP
04-Oct-21 11:47:01 AM : Reached waypoint #7 dist 79m
04-Oct-21 11:46:32 AM : Mission: 7 WP
04-Oct-21 11:46:32 AM : Mission: 6 LandStart
04-Oct-21 11:46:32 AM : Landing sequence start
04-Oct-21 11:46:32 AM : Mission: 7 WP
04-Oct-21 11:46:32 AM : Mission: 6 LandStart
04-Oct-21 11:46:31 AM : Mission complete, changing mode to RTL
04-Oct-21 11:46:31 AM : Reached waypoint #9 dist 77m
04-Oct-21 11:46:09 AM : Mission: 9 WP
04-Oct-21 11:46:09 AM : Reached waypoint #8 dist 76m
04-Oct-21 11:45:47 AM : Mission: 8 WP
04-Oct-21 11:45:47 AM : Reached waypoint #7 dist 78m
04-Oct-21 11:45:29 AM : Mission: 7 WP
04-Oct-21 11:45:29 AM : Mission: 6 LandStart
04-Oct-21 11:45:29 AM : Landing sequence start
04-Oct-21 11:45:29 AM : Mission: 7 WP
04-Oct-21 11:45:29 AM : Mission: 6 LandStart
04-Oct-21 11:45:24 AM : Mission: 7 WP
04-Oct-21 11:45:24 AM : Mission: 6 LandStart
04-Oct-21 11:45:24 AM : Landing sequence start
04-Oct-21 11:45:24 AM : Mission: 7 WP
04-Oct-21 11:45:24 AM : Mission: 6 LandStart
04-Oct-21 11:45:18 AM : Mission: 7 WP
04-Oct-21 11:45:18 AM : Mission: 6 LandStart
04-Oct-21 11:45:18 AM : Landing sequence start
04-Oct-21 11:45:18 AM : Mission: 7 WP
04-Oct-21 11:45:18 AM : Mission: 6 LandStart
04-Oct-21 11:45:17 AM : Mission complete, changing mode to RTL
04-Oct-21 11:45:17 AM : Reached waypoint #9 dist 78m
04-Oct-21 11:44:55 AM : Mission: 9 WP
04-Oct-21 11:44:55 AM : Reached waypoint #8 dist 76m
04-Oct-21 11:44:33 AM : Mission: 8 WP
04-Oct-21 11:44:33 AM : Reached waypoint #7 dist 78m
04-Oct-21 11:44:03 AM : Mission: 7 WP
04-Oct-21 11:44:03 AM : Mission: 6 LandStart
04-Oct-21 11:44:03 AM : Landing sequence start
04-Oct-21 11:44:03 AM : Mission: 7 WP
04-Oct-21 11:44:03 AM : Mission: 6 LandStart
04-Oct-21 11:44:03 AM : Mission complete, changing mode to RTL
04-Oct-21 11:44:03 AM : Reached waypoint #9 dist 78m
04-Oct-21 11:43:41 AM : Mission: 9 WP
04-Oct-21 11:43:41 AM : Reached waypoint #8 dist 78m
04-Oct-21 11:43:19 AM : Mission: 8 WP
04-Oct-21 11:43:19 AM : Reached waypoint #7 dist 79m
04-Oct-21 11:42:50 AM : Mission: 7 WP
04-Oct-21 11:42:50 AM : Mission: 6 LandStart
04-Oct-21 11:42:50 AM : Landing sequence start
04-Oct-21 11:42:50 AM : Mission: 7 WP
04-Oct-21 11:42:50 AM : Mission: 6 LandStart
04-Oct-21 11:42:50 AM : Mission complete, changing mode to RTL
04-Oct-21 11:42:50 AM : Reached waypoint #9 dist 77m
04-Oct-21 11:42:27 AM : Mission: 9 WP
04-Oct-21 11:42:27 AM : Reached waypoint #8 dist 76m
04-Oct-21 11:42:08 AM : Mission: 8 WP
04-Oct-21 11:42:08 AM : Reached waypoint #7 dist 5m
04-Oct-21 11:40:54 AM : Mission: 7 WP
04-Oct-21 11:40:54 AM : Mission: 6 LandStart
04-Oct-21 11:40:54 AM : Reached waypoint #5 dist 23m
04-Oct-21 11:40:34 AM : Mission: 5 WP
04-Oct-21 11:40:34 AM : Reached waypoint #4 dist 51m
04-Oct-21 11:39:53 AM : Mission: 4 WP
04-Oct-21 11:39:53 AM : Reached waypoint #3 dist 49m
04-Oct-21 11:39:07 AM : Mission: 3 WP
04-Oct-21 11:39:07 AM : Reached waypoint #2 dist 50m
04-Oct-21 11:37:51 AM : Mission: 2 WP
04-Oct-21 11:37:51 AM : Reached waypoint 1 dist 84m
04-Oct-21 11:37:40 AM : Mission: 1 WP
04-Oct-21 11:37:05 AM : Takeoff to 50m at 200.0m to -1.2 deg
The DO_LAND_START doesn’t do anything if you don’t do an RTL, so it just skips over it in normal mission processing. Typically there would be a DO_JUMP before the DO_LAND_START to make up a circuit
See docs here:
https://ardupilot.org/plane/docs/automatic-landing.html#using-do-land-start
I have gone through the documents and followed your comments also and added LOITER_UNLIMITED instead of DO_JUMB before DO_LAND_START.
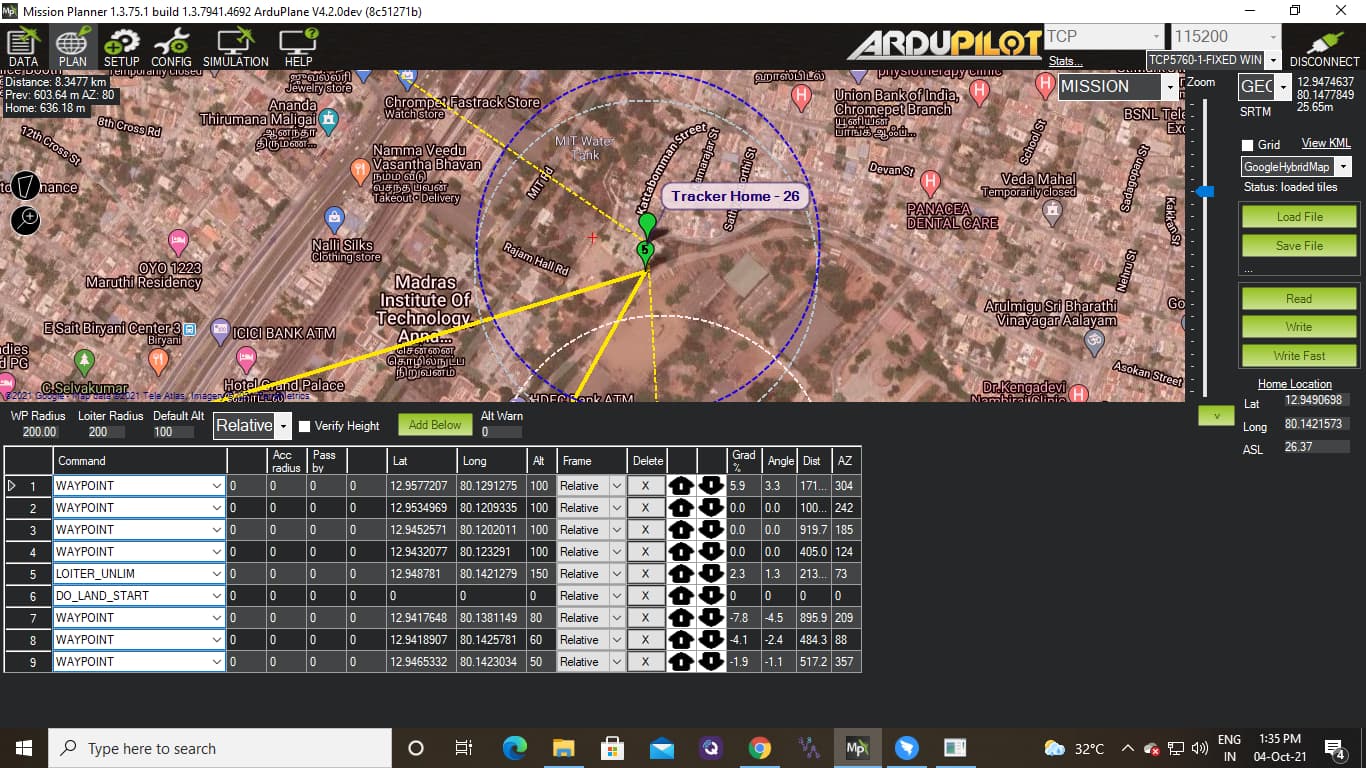
Aircraft start loitering at specified point , during loitering i just engaged RTL mode and its start follwing waypoint from 6 and follwed up to 9 but its doesnit land at all … its keep looping around point 7 to point 9.
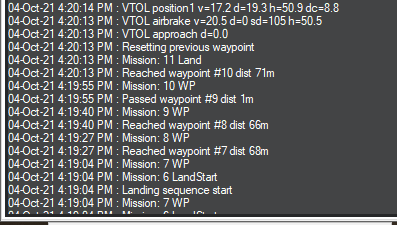
04-Oct-21 1:39:39 PM : Mission: 7 WP
04-Oct-21 1:39:39 PM : Mission: 6 LandStart
04-Oct-21 1:39:39 PM : Landing sequence start
04-Oct-21 1:39:39 PM : Mission: 7 WP
04-Oct-21 1:39:39 PM : Mission: 6 LandStart
04-Oct-21 1:39:39 PM : Mission complete, changing mode to RTL
04-Oct-21 1:39:39 PM : Reached waypoint #9 dist 71m
04-Oct-21 1:39:13 PM : Mission: 9 WP
04-Oct-21 1:39:13 PM : Reached waypoint #8 dist 68m
04-Oct-21 1:38:44 PM : Mission: 8 WP
04-Oct-21 1:38:44 PM : Reached waypoint #7 dist 71m
04-Oct-21 1:38:06 PM : Mission: 7 WP
04-Oct-21 1:38:06 PM : Mission: 6 LandStart
04-Oct-21 1:38:06 PM : Landing sequence start
04-Oct-21 1:38:06 PM : Mission: 7 WP
04-Oct-21 1:38:06 PM : Mission: 6 LandStart
04-Oct-21 1:38:06 PM : Mission complete, changing mode to RTL
04-Oct-21 1:38:06 PM : Reached waypoint #9 dist 71m
04-Oct-21 1:37:40 PM : Mission: 9 WP
04-Oct-21 1:37:40 PM : Reached waypoint #8 dist 69m
04-Oct-21 1:37:11 PM : Mission: 8 WP
04-Oct-21 1:37:11 PM : Reached waypoint #7 dist 70m
04-Oct-21 1:36:33 PM : Mission: 7 WP
04-Oct-21 1:36:33 PM : Mission: 6 LandStart
04-Oct-21 1:36:33 PM : Landing sequence start
04-Oct-21 1:36:33 PM : Mission: 7 WP
04-Oct-21 1:36:33 PM : Mission: 6 LandStart
04-Oct-21 1:36:33 PM : Mission complete, changing mode to RTL
04-Oct-21 1:36:33 PM : Reached waypoint #9 dist 71m
04-Oct-21 1:36:07 PM : Mission: 9 WP
04-Oct-21 1:36:07 PM : Reached waypoint #8 dist 69m
04-Oct-21 1:35:38 PM : Mission: 8 WP
04-Oct-21 1:35:38 PM : Reached waypoint #7 dist 71m
04-Oct-21 1:35:00 PM : Mission: 7 WP
04-Oct-21 1:35:00 PM : Mission: 6 LandStart
04-Oct-21 1:35:00 PM : Landing sequence start
04-Oct-21 1:35:00 PM : Mission: 7 WP
04-Oct-21 1:35:00 PM : Mission: 6 LandStart
04-Oct-21 1:35:00 PM : Mission complete, changing mode to RTL
04-Oct-21 1:35:00 PM : Reached waypoint #9 dist 72m
04-Oct-21 1:34:34 PM : Mission: 9 WP
04-Oct-21 1:34:34 PM : Reached waypoint #8 dist 68m
04-Oct-21 1:34:05 PM : Mission: 8 WP
04-Oct-21 1:34:05 PM : Reached waypoint #7 dist 72m
04-Oct-21 1:33:27 PM : Mission: 7 WP
04-Oct-21 1:33:27 PM : Mission: 6 LandStart
04-Oct-21 1:33:27 PM : Landing sequence start
04-Oct-21 1:33:27 PM : Mission: 7 WP
04-Oct-21 1:33:27 PM : Mission: 6 LandStart
04-Oct-21 1:33:27 PM : Mission complete, changing mode to RTL
04-Oct-21 1:33:27 PM : Reached waypoint #9 dist 72m
04-Oct-21 1:33:01 PM : Mission: 9 WP
04-Oct-21 1:33:01 PM : Reached waypoint #8 dist 68m
04-Oct-21 1:32:32 PM : Mission: 8 WP
04-Oct-21 1:32:32 PM : Reached waypoint #7 dist 71m
04-Oct-21 1:31:54 PM : Mission: 7 WP
04-Oct-21 1:31:54 PM : Mission: 6 LandStart
04-Oct-21 1:31:54 PM : Landing sequence start
04-Oct-21 1:31:54 PM : Mission: 7 WP
04-Oct-21 1:31:54 PM : Mission: 6 LandStart
04-Oct-21 1:31:54 PM : Mission complete, changing mode to RTL
04-Oct-21 1:31:54 PM : Reached waypoint #9 dist 72m
04-Oct-21 1:31:28 PM : Mission: 9 WP
04-Oct-21 1:31:28 PM : Reached waypoint #8 dist 69m
04-Oct-21 1:30:59 PM : Mission: 8 WP
04-Oct-21 1:30:59 PM : Reached waypoint #7 dist 70m
04-Oct-21 1:30:28 PM : Mission: 7 WP
04-Oct-21 1:30:28 PM : Mission: 6 LandStart
04-Oct-21 1:30:28 PM : Landing sequence start
04-Oct-21 1:30:28 PM : Mission: 7 WP
04-Oct-21 1:30:28 PM : Mission: 6 LandStart
04-Oct-21 1:30:21 PM : Mission: 7 WP
04-Oct-21 1:30:21 PM : Mission: 6 LandStart
04-Oct-21 1:30:21 PM : Landing sequence start
04-Oct-21 1:30:21 PM : Mission: 7 WP
04-Oct-21 1:30:21 PM : Mission: 6 LandStart
04-Oct-21 1:30:21 PM : Mission complete, changing mode to RTL
04-Oct-21 1:30:21 PM : Reached waypoint #9 dist 71m
04-Oct-21 1:29:55 PM : Mission: 9 WP
04-Oct-21 1:29:55 PM : Reached waypoint #8 dist 69m
04-Oct-21 1:29:26 PM : Mission: 8 WP
04-Oct-21 1:29:26 PM : Reached waypoint #7 dist 70m
04-Oct-21 1:28:48 PM : Mission: 7 WP
04-Oct-21 1:28:48 PM : Mission: 6 LandStart
04-Oct-21 1:28:48 PM : Landing sequence start
04-Oct-21 1:28:48 PM : Mission: 7 WP
04-Oct-21 1:28:48 PM : Mission: 6 LandStart
04-Oct-21 1:28:48 PM : Mission complete, changing mode to RTL
04-Oct-21 1:28:48 PM : Reached waypoint #9 dist 71m
04-Oct-21 1:28:22 PM : Mission: 9 WP
04-Oct-21 1:28:22 PM : Reached waypoint #8 dist 69m
04-Oct-21 1:27:53 PM : Mission: 8 WP
04-Oct-21 1:27:53 PM : Reached waypoint #7 dist 71m
04-Oct-21 1:27:15 PM : Mission: 7 WP
04-Oct-21 1:27:15 PM : Mission: 6 LandStart
04-Oct-21 1:27:15 PM : Landing sequence start
04-Oct-21 1:27:15 PM : Mission: 7 WP
04-Oct-21 1:27:15 PM : Mission: 6 LandStart
04-Oct-21 1:27:15 PM : Mission complete, changing mode to RTL
04-Oct-21 1:27:15 PM : Reached waypoint #9 dist 72m
04-Oct-21 1:26:49 PM : Mission: 9 WP
04-Oct-21 1:26:49 PM : Reached waypoint #8 dist 68m
04-Oct-21 1:26:20 PM : Mission: 8 WP
04-Oct-21 1:26:20 PM : Reached waypoint #7 dist 72m
04-Oct-21 1:25:43 PM : Mission: 7 WP
04-Oct-21 1:25:43 PM : Mission: 6 LandStart
04-Oct-21 1:25:43 PM : Landing sequence start
04-Oct-21 1:25:43 PM : Mission: 7 WP
04-Oct-21 1:25:43 PM : Mission: 6 LandStart
04-Oct-21 1:25:43 PM : Mission complete, changing mode to RTL
04-Oct-21 1:25:43 PM : Reached waypoint #9 dist 71m
04-Oct-21 1:25:17 PM : Mission: 9 WP
04-Oct-21 1:25:17 PM : Reached waypoint #8 dist 70m
04-Oct-21 1:24:50 PM : Mission: 8 WP
04-Oct-21 1:24:50 PM : Reached waypoint #7 dist 70m
04-Oct-21 1:23:51 PM : Mission: 7 WP
04-Oct-21 1:23:51 PM : Mission: 6 LandStart
04-Oct-21 1:23:51 PM : Landing sequence start
04-Oct-21 1:23:51 PM : Mission: 7 WP
04-Oct-21 1:23:51 PM : Mission: 6 LandStart
04-Oct-21 1:09:59 PM : Mission: 5 LoitUnlim
04-Oct-21 1:09:59 PM : Reached waypoint #4 dist 42m
04-Oct-21 1:09:41 PM : Mission: 4 WP
04-Oct-21 1:09:41 PM : Reached waypoint #3 dist 52m
04-Oct-21 1:08:59 PM : Mission: 3 WP
04-Oct-21 1:08:59 PM : Reached waypoint #2 dist 49m
04-Oct-21 1:08:13 PM : Mission: 2 WP
04-Oct-21 1:08:13 PM : Reached waypoint #1 dist 55m
04-Oct-21 1:07:49 PM : Mission: 1 WP
04-Oct-21 1:07:48 PM : Flight plan received
you need a LAND waypoint, at zero relative altitude
The DO_LAND_START doesn’t imply a land, for some people it is used to trigger a parachute release after flying to a desired location
I already tried with RETURN_TO_ LAUNCH relative Altitude was set zero only but that couldn’t solve the problem.
Any how I have to make VTOL_LAND COMMAND or Just LAND command with relative Altitude zero.
As you said i have planned the WP before the landing point is set at 360m away and mu RTL radius is -150m. the VTOL approach d=xx is auto calculated. if yes i would be wrong because i thought its based on RTL RADIUS which we set.

waypoint 10 is the landing point.
but still I’m facing the below issue.
how could the VTOL _approach d =0 when RTL radius set to 150 meter and WP before landing point set to 360m away.
I couldn’t get the successful VTOL transition and VTOL landing at desired point. Definitely it made me confusion .sorry for keep troubling you here.
1 Like
Sorry @tridge .was wrong statement and didn’t notice .( Instead of couldn’t I wrote could and now I edited)
Still now couldn’t get sucessful vtol transition and VTOL landing at desired point.
send me a log file and I’ll have a look
hi tridge I’m sharing link here with drive
https://drive.google.com/file/d/1QgMr14tq3UfweZANhiJs2fzZEkytAC2N/view?usp=sharing, https://drive.google.com/file/d/1Yl2G_1YH4o30uXzbblImaRu_HA0ow-vF/view?usp=sharing, https://drive.google.com/file/d/1sDXcj7tVBdUOY7h7utPJup9FAAQWNd4v/view?usp=sharing
@tridge Thank you your support now I’m almost clear on what’s happening on various stages of VTOL Landing and i got quite transition point but still model didn’t land i don’t know why because of simulator ? in real time this may perform correctly ?
05-Oct-21 6:02:47 PM : SIM Hit ground at 0.982719 m/s
05-Oct-21 6:01:59 PM : VTOL position2 started v=9.4 d=4.3
05-Oct-21 6:01:54 PM : VTOL position1 v=15.1 d=41.9 h=52.2 dc=15.8
05-Oct-21 6:01:53 PM : VTOL airbrake v=20.7 d=71 sd=72 h=51.4
05-Oct-21 6:01:46 PM : VTOL approach d=217.9
05-Oct-21 6:01:46 PM : Mission: 12 Land
05-Oct-21 6:01:46 PM : Reached waypoint #11 dist 0m
05-Oct-21 6:01:31 PM : Mission: 11 WP
05-Oct-21 6:01:31 PM : Reached waypoint #10 dist 71m
05-Oct-21 6:01:17 PM : Mission: 10 WP
05-Oct-21 6:01:17 PM : Reached waypoint #9 dist 70m
05-Oct-21 6:00:40 PM : Mission: 9 WP
05-Oct-21 6:00:40 PM : Mission: 8 LandStart
05-Oct-21 6:00:40 PM : Landing sequence start
05-Oct-21 6:00:40 PM : Mission: 9 WP
05-Oct-21 6:00:40 PM : Mission: 8 LandStart
05-Oct-21 5:59:26 PM : Mission: 7 LoitUnlim
05-Oct-21 5:55:34 PM : Transition done
05-Oct-21 5:55:31 PM : EKF2 IMU1 MAG0 in-flight yaw alignment complete
05-Oct-21 5:55:31 PM : EKF2 IMU0 MAG0 in-flight yaw alignment complete
05-Oct-21 5:55:29 PM : Transition airspeed reached 18.1
05-Oct-21 5:55:26 PM : Takeoff to 50m at 0.0m to -118.1 deg
05-Oct-21 5:55:26 PM : Triggered AUTO. GPS speed = 0.0
05-Oct-21 5:55:26 PM : Armed AUTO, xaccel = -0.1 m/s/s, waiting 0.2 sec
i was kept WP before the landing point at 220m away and when it that waypoint it gave me message the VTOL Approach d=217m and vtol airbrake d=71m now I’m clear about it
[quote=“tridge, post:32, topic:76507”]
but is great for coming back and landing from anywhere
but this QRTL makes worried to me. why because if i command QRTL it start decent to Q_RTL_ALT from current altitude while moving forward.
if QRTL would activate from long distance this may cause altitude crash issue(incase high buildings or terrain like above Q_RTL_ALT). If Q_RTL_ALT set too high there will be risk of more time to land and too much battery consumption.
can you give me any best solution on this?
.
For the 4.1.0 stable there is no firmware with bootloader for a Matek F765-WSE. What firmware with bootloader can be installed there? I already want to use (plane) stable 4.1.0.
Why is the directory in the firmware section actually called “MatekF765-SE” and not “MatekF765-WSE” as the product is called?
Hi tridge,
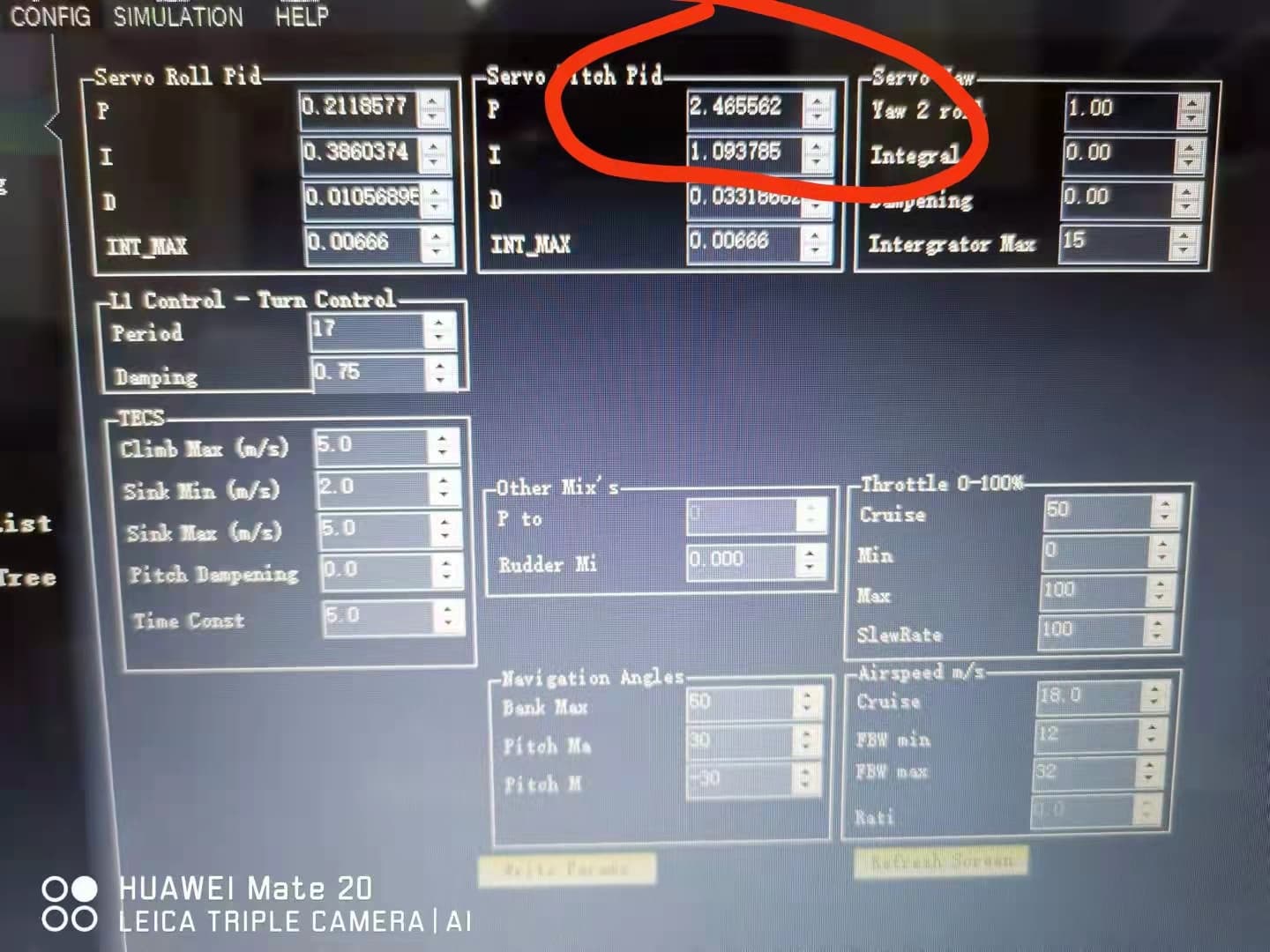
The P of the PID become very big value after autotune,and the plane crash after next flight as soon as take off.
My minitalon flys ok and have performed an autotune and check evey thing is ok ,the p of the pitch PID is about 0.27.then I put it at the hourse and do not change any parameters.
I had a flight several days later and found the plane nose up and down in the air,I had check the CG before take off. So i make autotune in the air ,the plane go stable again then land the plane.
then I change another battery and fly again,but the plane crash as soon as it take off.
After the crash,I connect the FC to mission planner ,and found the P of the pitch PID is much higher,about 2.4,this is quite abnormal,why the P of the pitch PID become so high after autotune.
Can you check my replay log along with the video to find the problems, thinks
FC is mayatek F765-wing,firmware is 4.1 beta 8.
the first flight of the day:

the second flight of the day

Please download the log from google driverhttps://drive.google.com/drive/folders/1wHvFSUL_xUWf-GHtEMuUVUTdwd1IIOEj?usp=sharing
@tridge
1 Like