Test flight completed 
In order to be able to actually compare both sensors (SDP33 and MS5525), I fixed them absolutely parallel in an aluminum holder. The flexible hoses run through aluminum pipes to the interior of the aircraft, so that turbulence on the soft hoses can not affect the measurement (A third pitot tube on the left side belongs to the aircraft before the measurement mounted and is not connected).
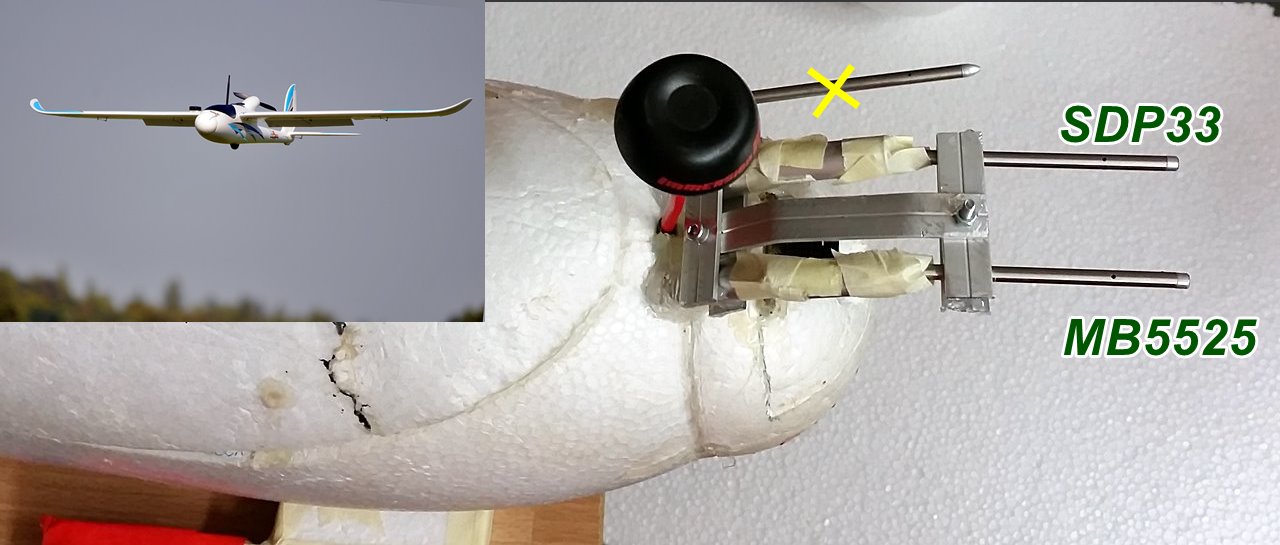

Both sensors were in the air for the first time with ARSPD_RATIO unchanged and still not calibrated.
Parameter: 00000140.BIN.param (14.2 KB)
Results:
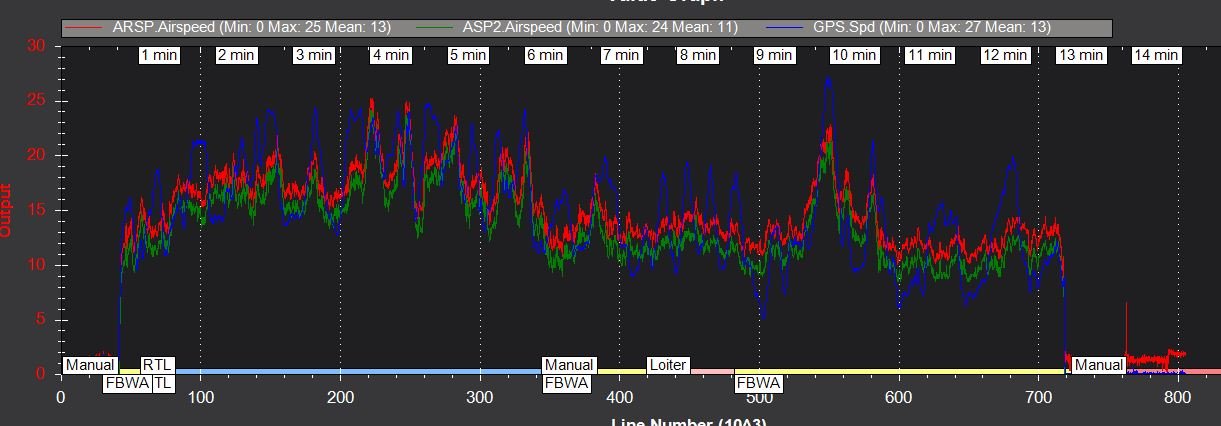

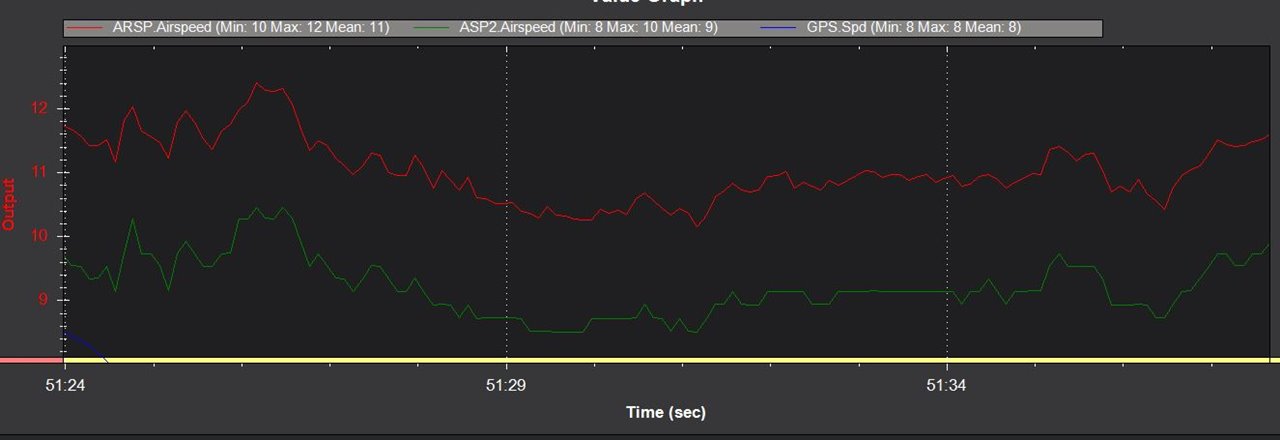
I am impressed by how synchronous the readings are.
Logfile (0000140.BIN) : https://www.magentacloud.de/share/ualbgv5hup
Rolf